


Inspiration
As first-year university students with very little robotics knowledge, our primary inspiration for this project was to learn more about robotics and gain experience working on a robotics project and the tools that come with it, such as Arduino.
What it should do
Based on the AV challenge, the goal was to create a vehicle to maneuver along black lines on the floor and detect obstacles in its path. Although we could not fully complete the entirety of this functionality, we successfully implemented the infrared sensors used for line detection.
How we built it
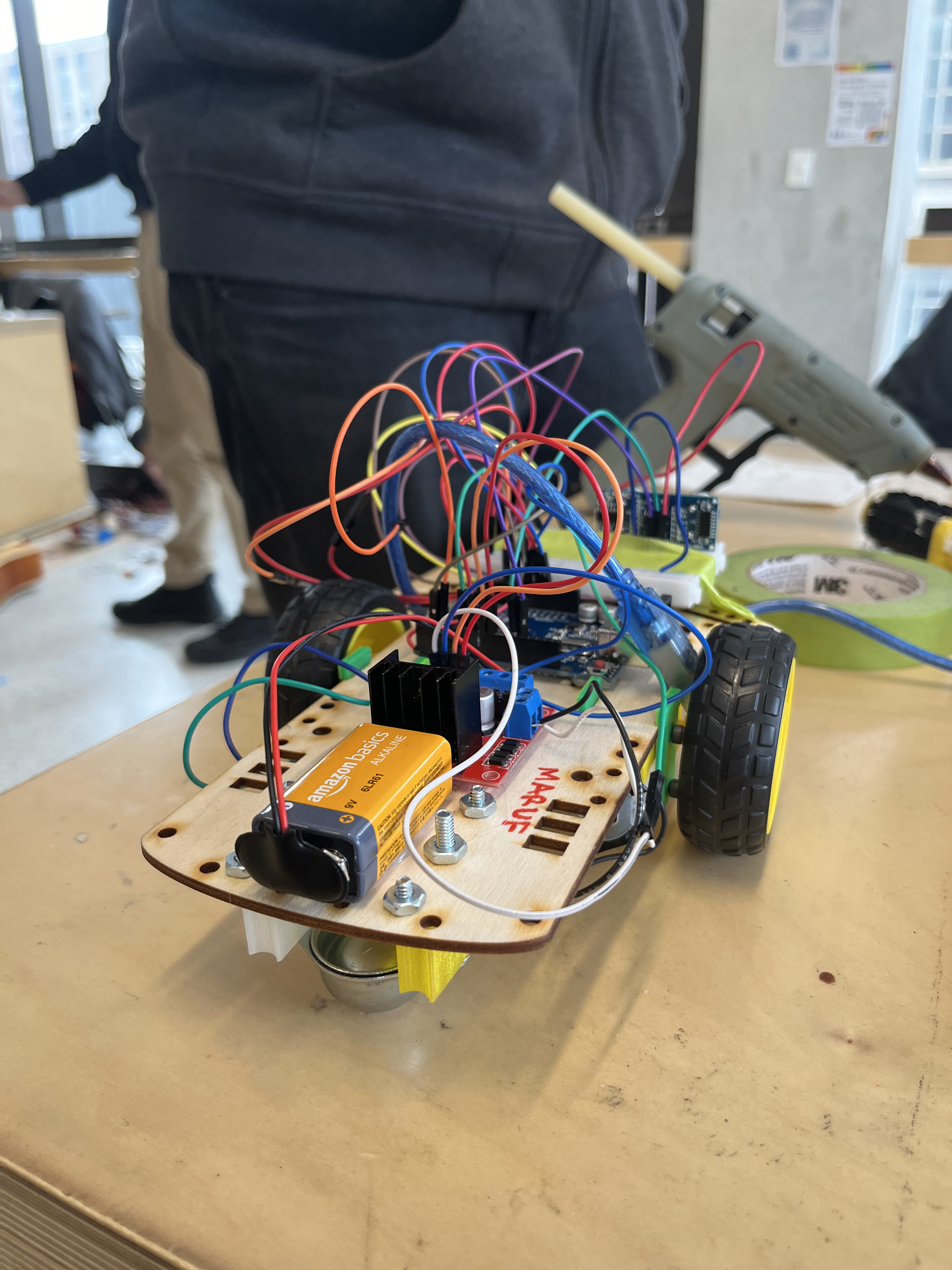
Based on the design provided by UTRAHacks, we mounted motors on the chassis and attached them to the wheels. The motors were attached to an L298N motor driver module, which was attached to an Arduino Uno microcontroller. The microcontroller was also attached to infrared and ultrasonic sensors for the purposes of line and object detection.
Challenges we ran into
The challenges we ran into initially consisted of hardware issues. The soldering for the motors we used would often detach, and the gear attached to the motor broke off, which required us to get a new motor. Furthermore, we were not able to get the ultrasonic sensor working. We believe that this was an issue with the wiring.
Regarding software, we initially ran into problems when we tried coding the logic for the motor driver module from scratch. After troubleshooting, we switched to a premade L298N library created by Andrea Lombardo, which was much more straightforward.
Accomplishments that we're proud of
Although we could not fully complete the requirements of the challenge, we are proud of the progress that we made with little to no prior experience with robotics technology. We learned a lot about the different components used in a device like this and the software involved, such as the code for the Arduino microcontroller.
What we learned
In terms of hardware, we learned a lot about how our components, such as the infrared and ultrasonic sensors, worked. We developed the skills to use these components efficiently and accurately in our vehicles. In terms of software, we learned a lot about programming logic in the hardware using the Arduino microcontroller.
What's next for Rover878
Although we could not complete the vehicle in time, the skills and experience we have gained will be great assets for our future endeavors in the computer industry.

Log in or sign up for Devpost to join the conversation.