-
-
Rover XR Title Slide
-
Rover XR Details
-
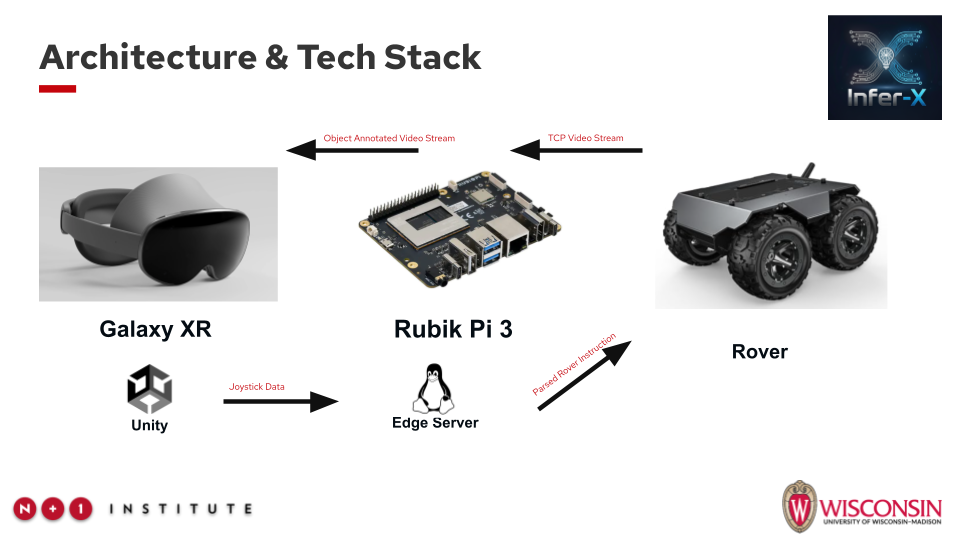
Architecture And Tech Stack
-
The team!
-

Galaxy-XR ADB Building
-
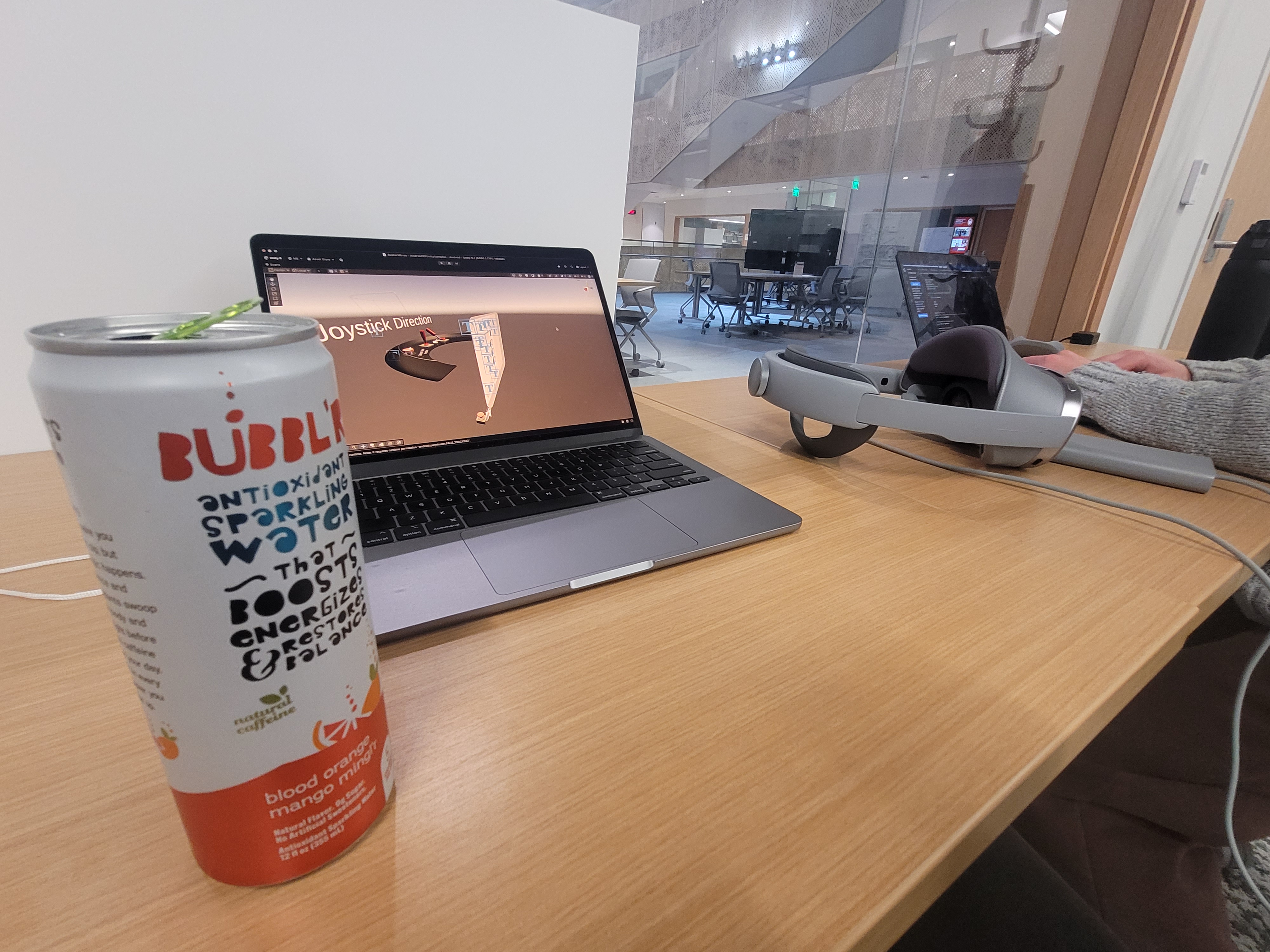
Unity Development
-

Headset in action
-

Rover Flashing and Low Level Scripting
-

The BEAST
-

BOO! JUMPSCARE!!!
-

can you believe this guy?





What Started It
This project is the culmination of a process that began with a simple conversation about how useful it would be to control a robot via a VR headset. What started as a “that would be cool” idea quickly turned into something we genuinely wanted to build.
So we decided to give it a shot!!
We used the tech at the Infer-X Lab, and a lot of caffeine and adrenaline, to build this crazy ambitious project.
What it does
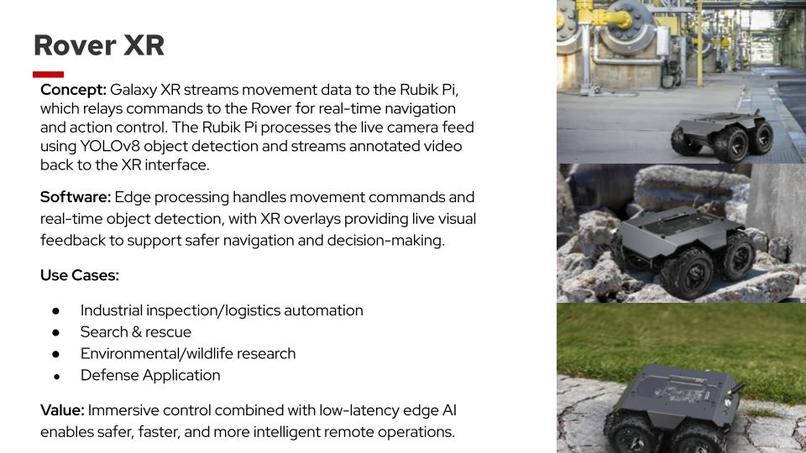
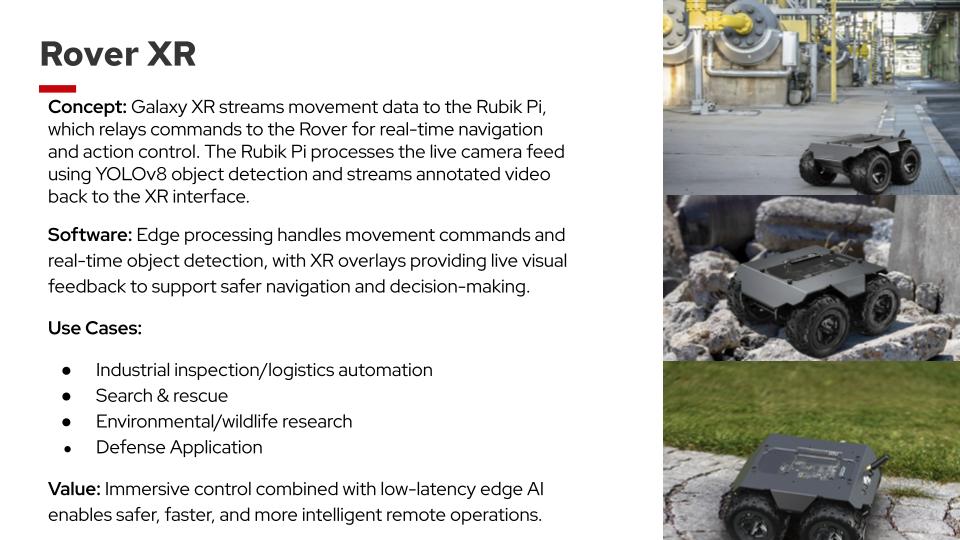
Our project enables users to control a physical Wave Rover through an XR interface, leveraging edge technology for real-time interaction. Commands are processed on the Rubik Pi and sent directly to the rover through a UART interface for quick, low-latency wireless navigation.
On top of that, the Rubik Pi runs YOLOv8 object detection on the live camera feed and streams annotated video back to the headset, giving the operator real-time visual awareness while driving.
How we built it
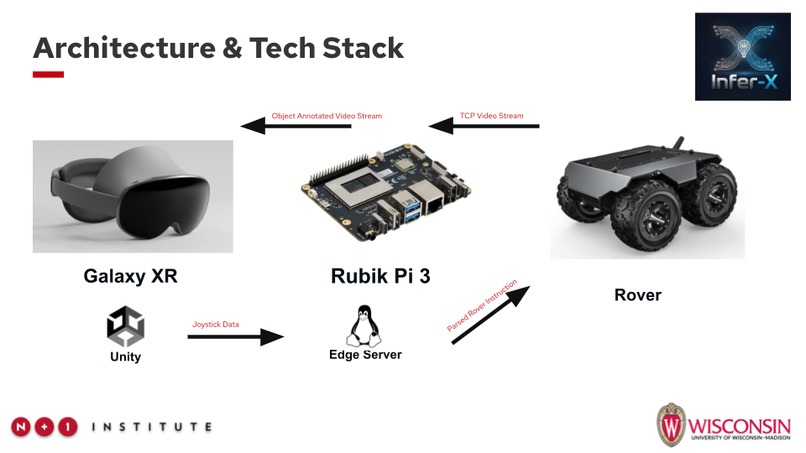
Our hardware stack utilized the Galaxy-XR headset, a Rubik Pi, and the Waveshare Wave Rover.
On the software side, we used Unity to create the virtual interface. Using C# scripts in Unity, we send UDP packets of interface interaction to the Rubik Pi, which hosts its own network for quick edge processing. On the Rubik Pi running Ubuntu Server, we parse the interaction packets and send JSON movement requests to the rover MCU, which operates the vehicle.
For vision, we integrated YOLOv8 directly on the Rubik Pi to perform real-time object detection on the camera feed. The Pi annotates the video with bounding boxes and streams it back to the Galaxy-XR headset via MJPEG.
Challenges we ran into
Networking and hardware hell!!! 💀
Flashing Rubik Pis took a lot of work to get going. This was our first time working with Rubik Pis, and we had to read a ton of documentation and do a lot of testing to make sure the components we needed were compatible and would work the same way they do on a Raspberry Pi, which we're more familiar with.
We also had trouble managing real-time video streams, integrating multiple hardware components, and handling UDP packets alongside IP addresses, port numbers, and DNS masking services.
Our biggest challenge was engineering the full loop between the XR headset and the rover-Pi combo. We had to switch protocols multiple times for our video stream to ensure full compatibility with our XR interface, especially once we added real-time object detection at the edge.
Accomplishments that we're proud of
Bringing together hardware control, XR interaction, real-time networking, and edge AI into one fully integrated vertical system.
What we learned
Software:
XR Unity skills
Unity Version Control
Networking - UDP and TCP protocols
Edge AI integration with YOLOv8
Hardware:
Arduino flashing
Installing OS to Rubik Pi
How to properly connect and debug a rover system
What's next for Rover XR (RXR)
Improve and optimize edge object detection performance
Add interface features for controlling multiple rovers at once
Autonomous driving
Custom dataset collection and fine-tuned detection models

Log in or sign up for Devpost to join the conversation.