Inspiration
We wanted to draw something using phone gyroscope.
What it does
It controls a rover based on the movements of the phone. (or this is what it was supposed to do, we did not finish the bluetooth connection)
How we built it
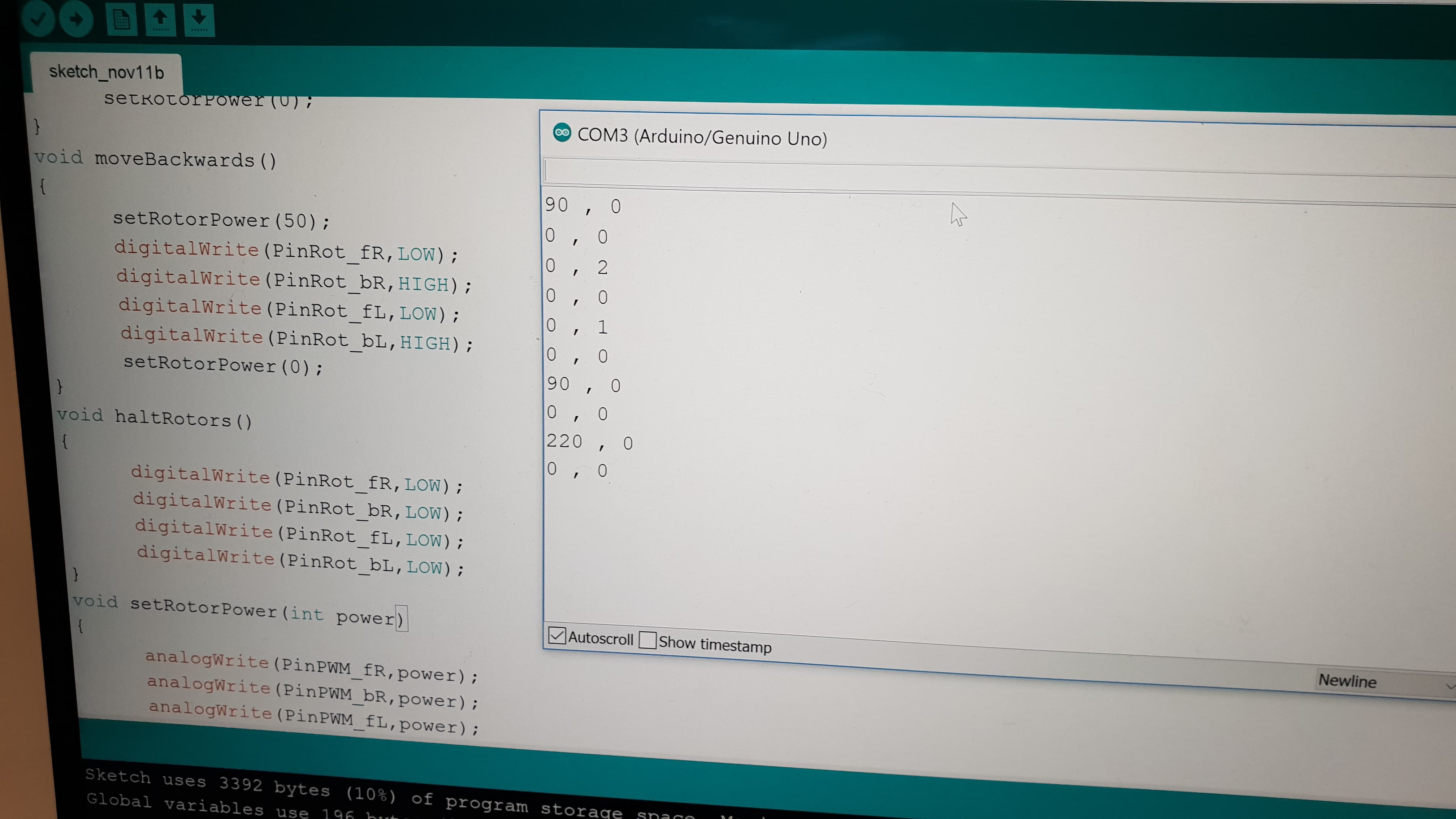
We made an app with java and android studio that tracks the phone's movements and it outputs an angle and a direction code (forward, on place, backwards) We (tried to) use bluetooth to pass the outputs from the android app as inputs for the arduino and computed the rover's movement based on that.
Challenges we ran into
We couldn't get the bluetooth to work so we did not run proper tests on it. Both of the apps work properly but the connection between them doesn't.
Accomplishments that we're proud of
Made the java app to track phone movements using phone's sensors and got the rover 5 to work the way we wanted it to.
What we learned
How to use the rotational vectors on the phone to get the angle of movement and the state. How to connect and program a Rover 5 with Arduino Uno.
What's next for Rover Control
Get the bluetooth to work, of course and add a friendly gui for the mobile app.
Log in or sign up for Devpost to join the conversation.