-

EarthHacks Logo
-

This is ROSS.
-

This shows the layout of the hardware that goes into our ROSS prototype.
-
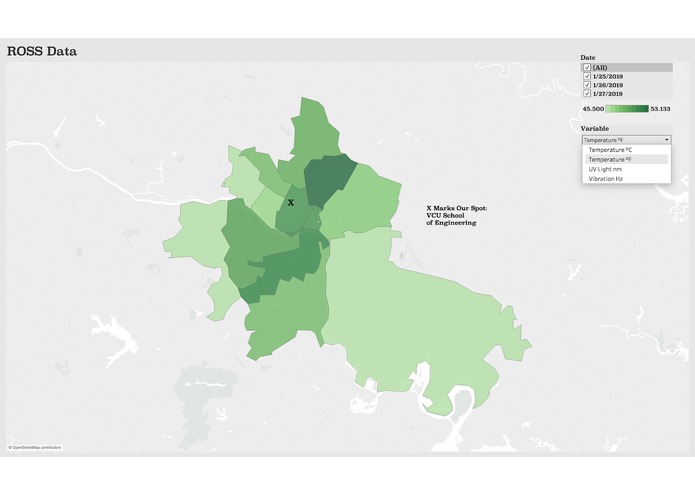
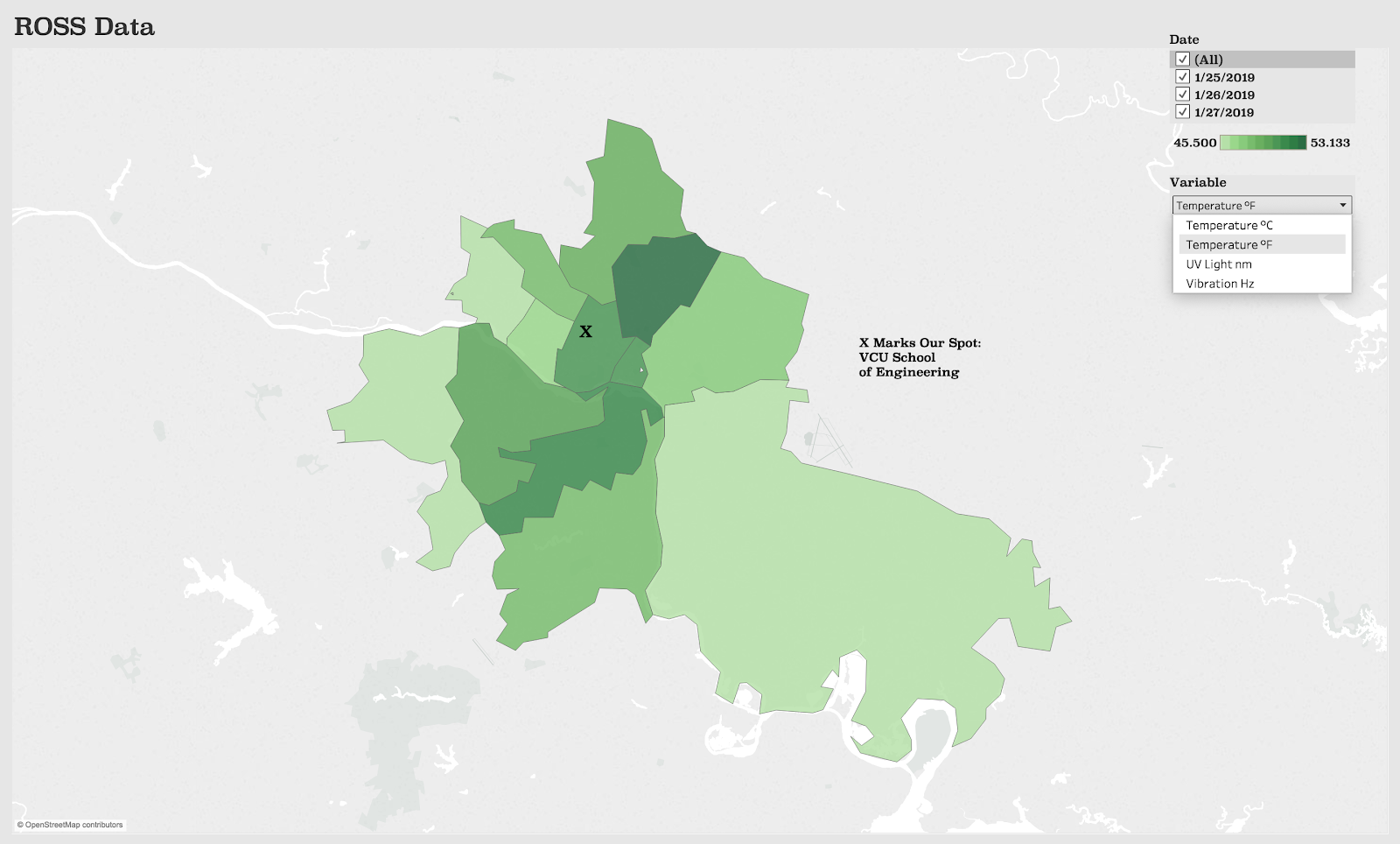
Screenshot of what our data visualization looks like.
-

This is the Home page of our website.


Inspiration
Our team is highly motivated and inspired by issues in Public Health and Waste Management throughout the world. We really wanted to address one of the biggest issues with Waste that is ever-growing: E-Waste. As technology grows, so does the E-Waste produced which is not properly disposed of. As a solution to address this issue, we came up with ROSS, a way to change the way people think about their old technology and increase the amount of re-used phones.
What it does
ROSS is a Repurposed Open-source Smartphone Sensor that helps reduce e-waste and promotes community growth. ROSS helps communities around the globe bring in open source data on the community they live in and pushes these cities and towns further towards the goal of becoming a smart city without the major costs.
How we made it
We decided to 3D print our sensor casing since it was most accessible to us. We 3D modeled our case with slots for the 3 sensors we are incorporating in our prototype. The main part of ROSS though comes from the datasets that the public can find online at our website notonabreak.com.
What we learned
We learned that e-waste is a HUGE issue and it's only going to get worse as technology advances. Most technology currently either gets sent to a dump to sit or gets sent overseas to workers with no protective equipment who take good parts out and burn the rest, thus releasing toxic chemicals into the atmosphere and into their own lungs.
What's next for ROSS
We want ROSS to become a global objective for all communities to jump into and get going. The data that can be brought in through this can benefit communities everywhere. With this technology, you can pull in temperature data which allows hospitals to predict where and when they might start seeing more signs of heat-related health issues. You could use the vast network of these phones to increase WiFi and GPS capabilities in rural and condensed urban areas. Vibration sensors could be used to help predict earthquakes and gas sensors could help determine if there is a gas leak in a certain area. In the future, we want ROSS to be able to all these things and more.
Built With
- 3dprinting
- data-analytics
- hardware
- iot
- sensors
- tableau

Log in or sign up for Devpost to join the conversation.