-
-

Box getting laser cut
-

Arduino code
-

Vault that unlocks when winning
-

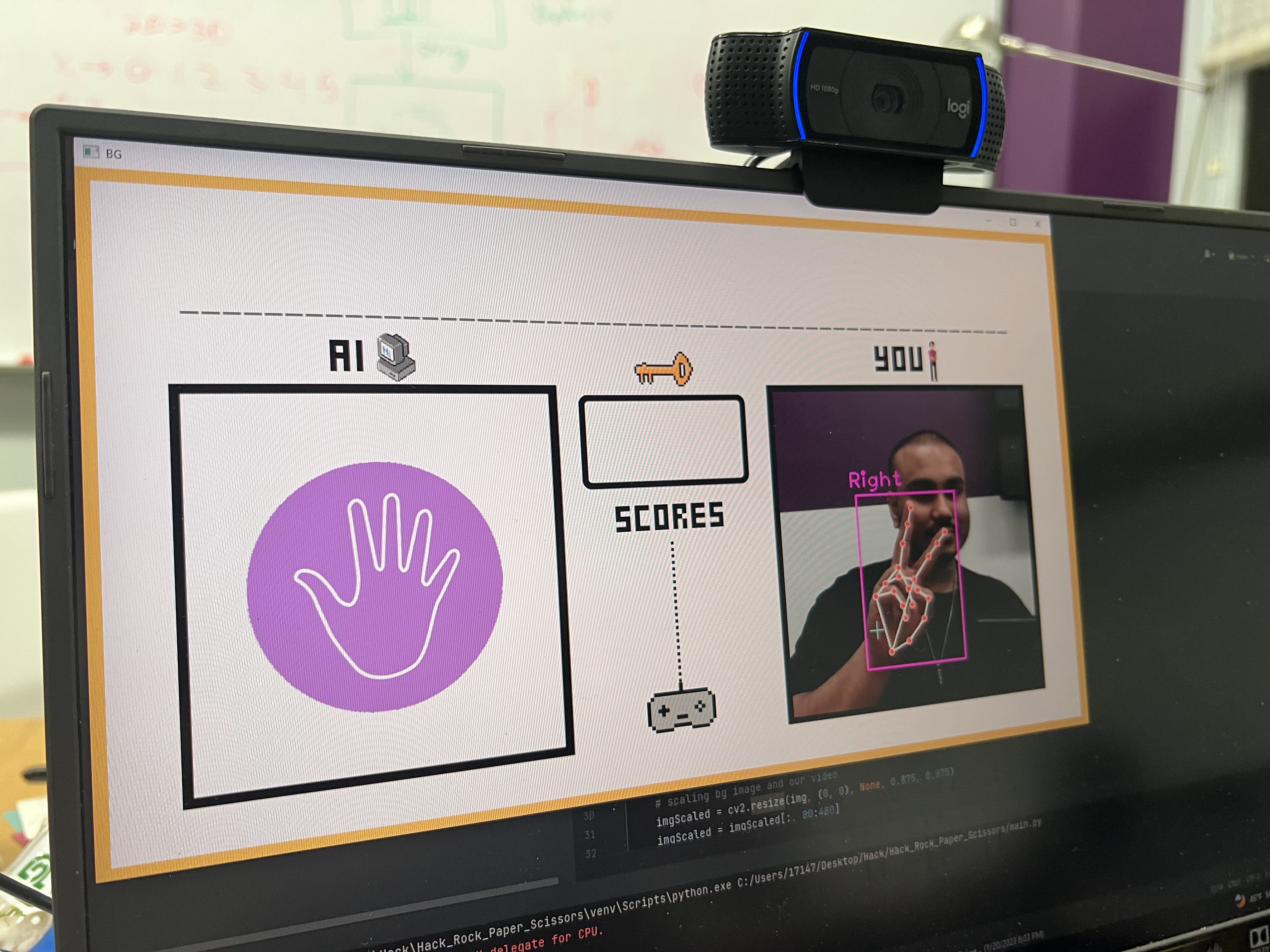
Game GUI



Inspiration
As engineers, it's all too easy to find a normal everyday problem and look for innovative solutions that make us re-imagine our world. However, our tendency to opt for what is easy and convenient can often be a barrier to truly addressing the needs that must be met. The concept for our rock-paper-scissors robot was born from a desire to create a fun way to restrict ourselves from our distractions.
What it does
Using the most strategic rock-paper-scissors algorithms with actual machine vision, we read the player's hand movements to determine the winner. If the player wins, they will be rewarded with access to the vault.
How we built it
We began by researching different machine vision techniques that could be used to track hand movements. After experimenting with several different approaches, we settled on using a webcam and OpenCV to process images and detect the position of the player's hand.
Surprisingly enough there are algorithms to play rock-paper-scissors and we chose the Zhejiang Cycle algorithm which has a win rate of 65%. Next, we worked on building the robotic arm that would be controlled by Arduino. This involved designing the hand in SolidWorks, assembling the mechanical components, such as the servo motors, and writing code to control their movement.
Challenges we ran into
One of the biggest challenges we faced was getting the machine vision and the robotic arm to work together. It took a lot of trial and error to get the timing and coordination just right. We had trouble establishing a wifi connection with the computer playing the game and the robot hand.
What we learned
Working in a group was a great experience as we were able to learn from each other and divide the work among us, but also it was challenging to coordinate our schedules and make decisions as a team. Classes rarely cross-discipline and applying our skills in a new way was a novel experience that taught us a lot about design and prototyping. Overall, this project taught us the importance of patience and perseverance in the face of obstacles. It was a great learning experience and we are proud of what we were able to accomplish together.
What's next for Roshambo
We want to use reinforcement learning to increase the win rate of the robot. Also, we want to add functionality to detect more physical exercises like push-ups. We are looking for venture capitalists interested in helping us ship this product out across the world as we know it will disrupt the delayed gratification market as well as motivate roshambo tech for days to come.

Log in or sign up for Devpost to join the conversation.