-
-
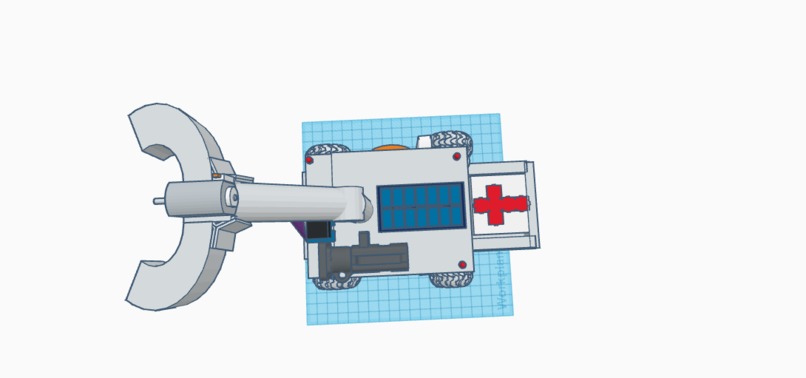
root the robot
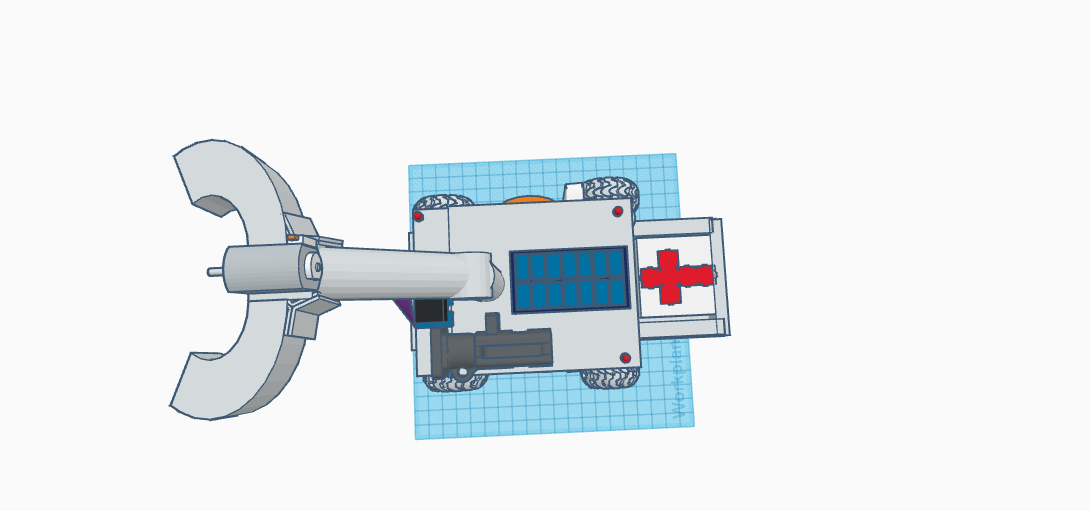
My robot is called Root and it is an all terrain robot that is made to rescue people from rubble. It has a claw to move rubble out of its path. It’s also equipped with all terrain wheels so that it can traverse over rocks. It is equipped with heat sensors to look for heat from human bodies trapped under rubble. My robot has springs attached to the wheels so that the robot doesn’t flip over that easily. The springs help the robot to maintain stability when driving over a bumpy surface. At the back of root, there is an emergency first aid kit. Root has flashing lights that indicate if it has found a person. Root also has a phone that is nailed into it. This phone is connected to sensors that activate when a person is found. The phone immediately sends its location so that people can come save the person that is trapped. Root is equipped with a video camera so that the operator can see where they are driving. Also, the video camera assists the robot during its autonomous mode. The robot notices its surroundings and figures out how to avoid and go over obstacles. Root uses a solar panel as an extra power source so that it can have extended mission time. A battery and motor are located at the center of Root. They are protected by pillars that can be connected and disconnected so that they can easily be removed to clean the motor and battery. I learned that designing a robot can be difficult and you have to think out of the box and be creative to design. I learned that if you work hard enough, you will eventually succeed. I started my project by building the robot's wheels and base. I made sure to make a sturdy structure. I originally tried to make the wheels a tank uses, but I found it to be too difficult for me. I decided to make some tires with springs instead. The springs would help the robot maintain balance when going over bumpy terrain. I then put in the motor and the brain at the center of the robot. I protected them with cylinders. After that, I started working on the claw. I tried many designs until I found the one that I thought looked the best. I then added the solar panel and LED lights on the top of the robot. After that, I attached the phone as communication. I set up the video camera so that the driver could see where they are riving. The robot can also autonomously use the video camera to navigate around rubble. A challenge I faced was the design of my claw. I had made about 4 different prototypes until I picked the one that I wanted. It was also sort of difficult to find certain pieces. A major challenge I faced was that I was the only person working on the project. I didn't work on a team, so I had to do all the work by myself.

Log in or sign up for Devpost to join the conversation.