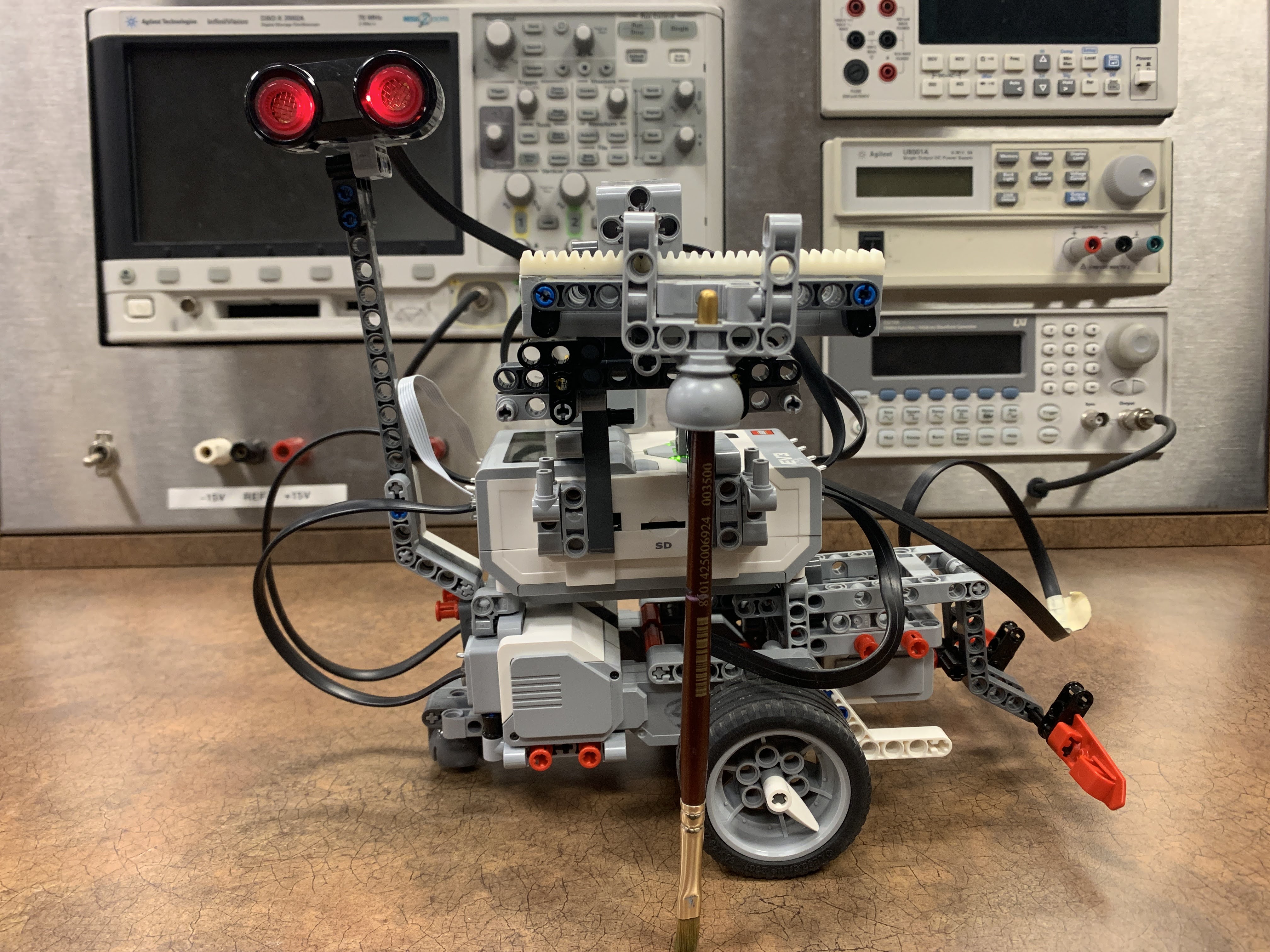
Our team of three designed a robot to clean the corners and edges of hallways. The robot will start in one position and be able to autonomously clean all four sides and corners of the hallway. The robot will have a cleaning attachment, and a brush placed on the right side. The robot will detect the distance between the wall, using the ultrasonic sensor, to readjust itself. The touch sensor will detect an object or wall and this proceeds until the robot has finished.
The overall program was divided up based on the actions the robot needed to complete to accomplish the overarching goal of cleaning a room. Big tasks that the robot needed to complete were broken into smaller actions, the following process was followed: Final Goal: Clean 4 sides of a hallway Task 1: Cleaning one hallway side
- Mini Task: Move in 20 cm increments
- Mini Task: Clean with mop
- Mini Task: Sense Interference, Sense Object, Sense Wall Task 2: Turn
- Mini Task: Use gyro sensor to turn
- Mini Task: Adjust distance to wall, Sense Wall, Turn
In the end, these functions were implemented in their respective places, and the main code was then easy to implement. Each member in a group was able to code a few functions, and calling other people’s functions to create their own function.

Log in or sign up for Devpost to join the conversation.