-
-
-
In progress.
-

Raspberry Pi
-

-


Inspiration
Our inspiration was Northrop Grumman for having provided us the materials and opportunity to work with software-defined radio and signal processing.
What it does
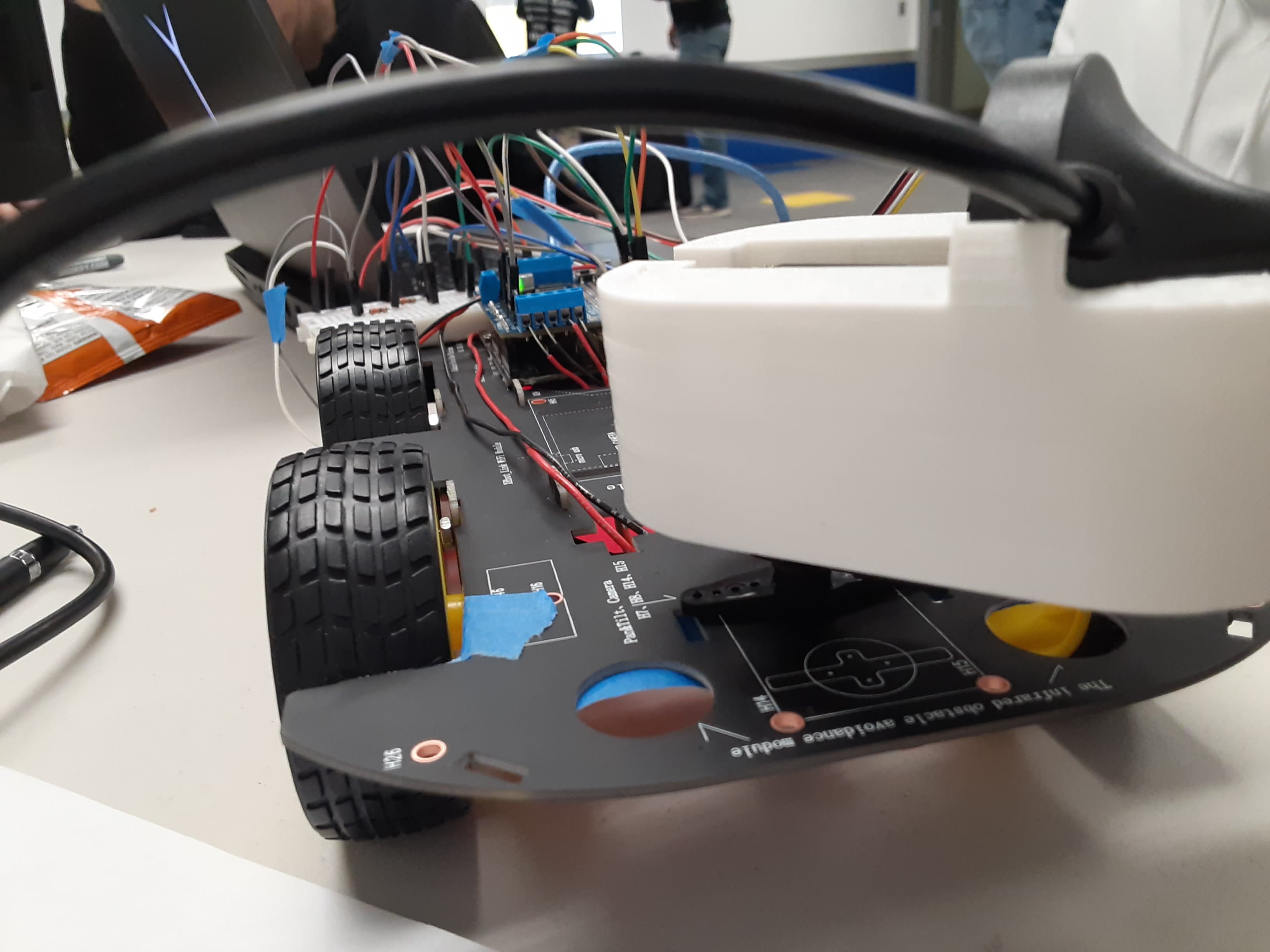
This autonomous vehicle tracks very high-frequency signals and follows it to the location of its emitter.
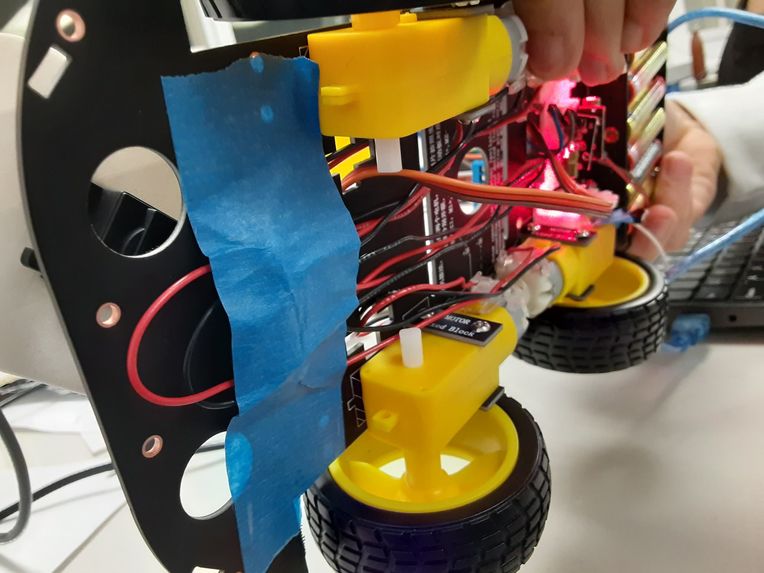
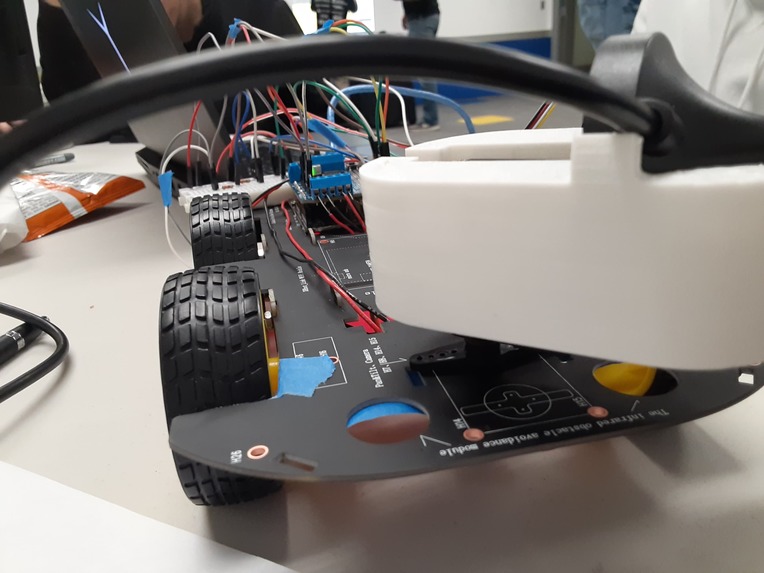
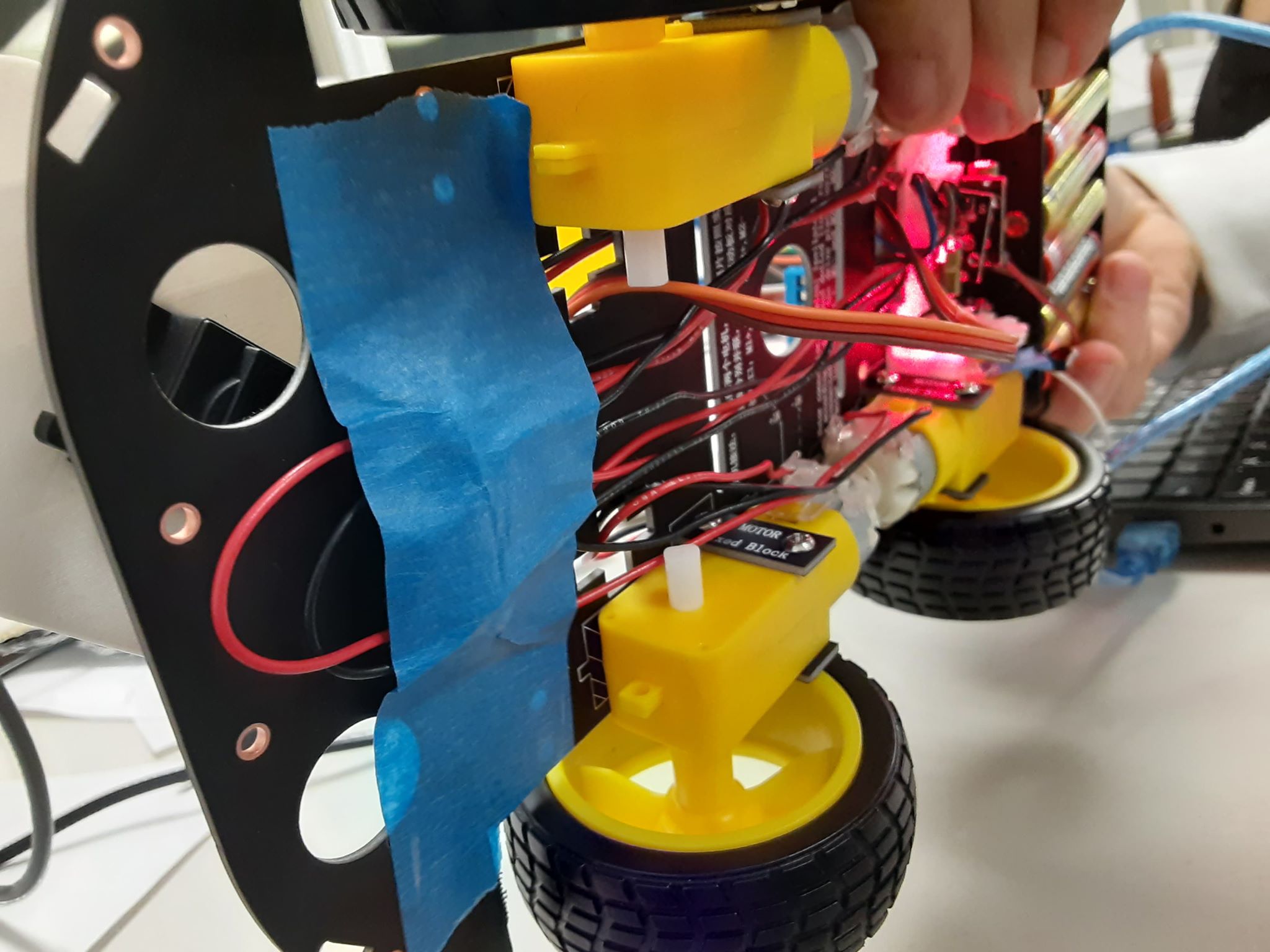
How we built it
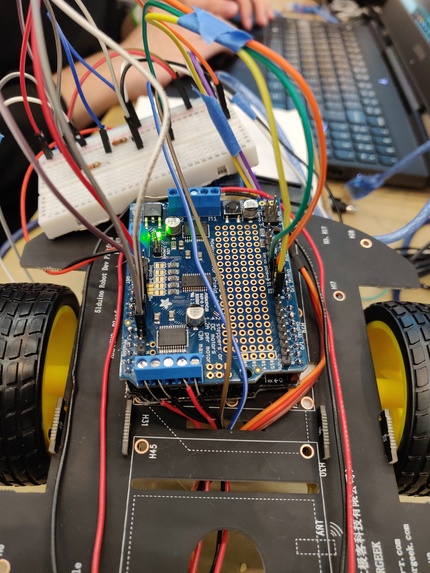
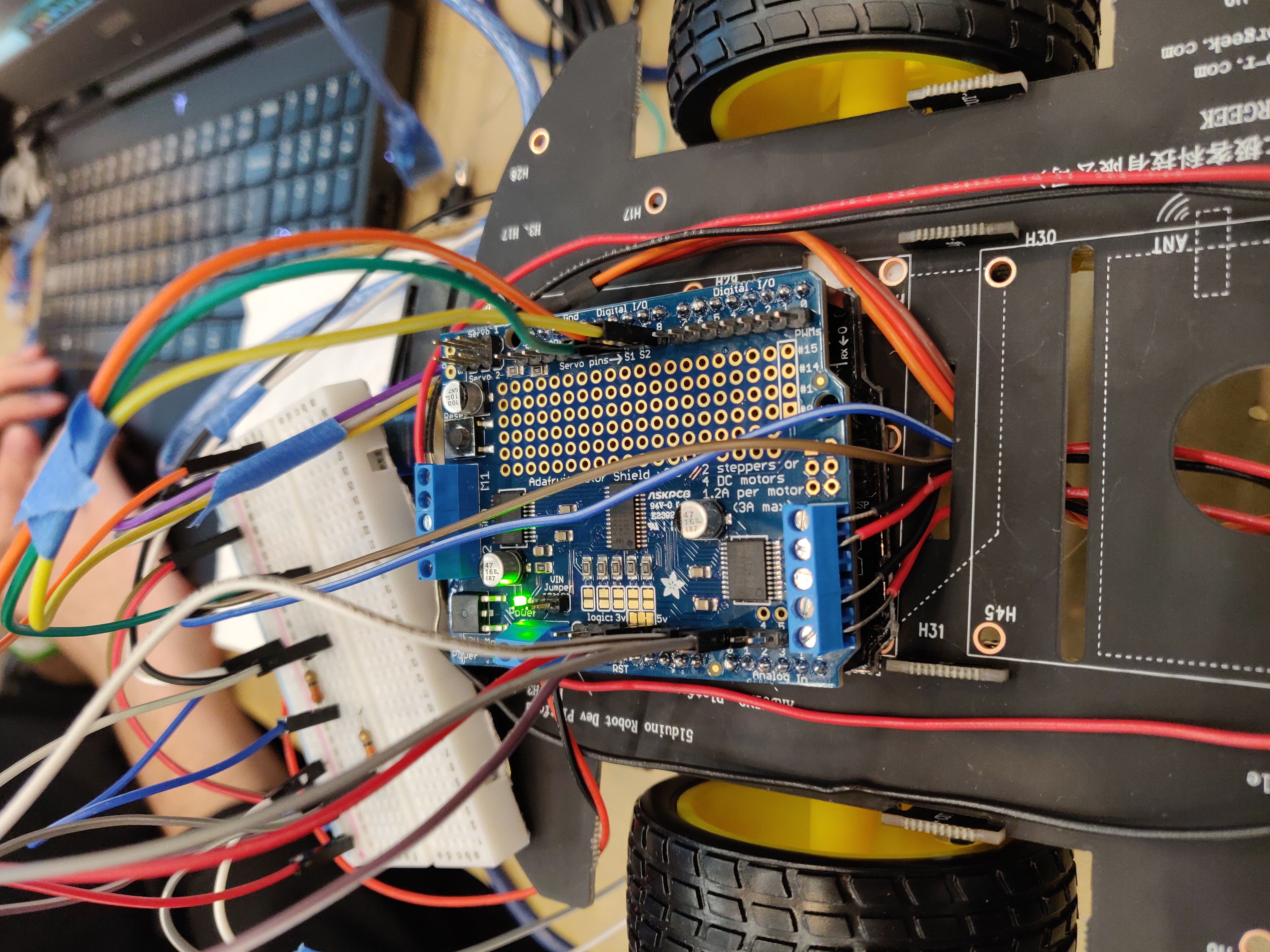
We receive signals using an RTL-SDR which is then processed in GNU Radio. In the GNU Radio we used Python to simplify the VHF signals such that the largest amplitude is found. The largest value is then sent to Arduino where a large value drives the vehicle towards the signal source. The car itself is designed by the kit provided by Northrop Grumman. We 3D printed a bracket for a photo-resistor, mount for the antenna, and a mount for the laser diodes.
Challenges we ran into
We had initially worked with the DragonBoard, but found too many issues such as being unable to install necessary programs for our project. We later also struggled with navigating through GNU Radio, working with software-defined radio and signal processing, and communicating between Raspberry Pi and Arduino.
Accomplishments that we're proud of
We are proud of persevering through our struggles and learning while working with the new programs and languages.
What we learned
We learned how to decipher radio signals and work with microcontrollers such as Raspberry Pi and Arduino. We also learned to code in Python and have improved in our C++ skills.
What's next for ROLL-E
We hope for ROLL-E to be able to navigate a more complex terrain and identify more convoluted signals.
Built With
- arduino
- c++
- gnu-radio
- python
- raspberry-pi
- rtl-sdr
- software-defined-radio-&-antennas-kit

Log in or sign up for Devpost to join the conversation.