-
-
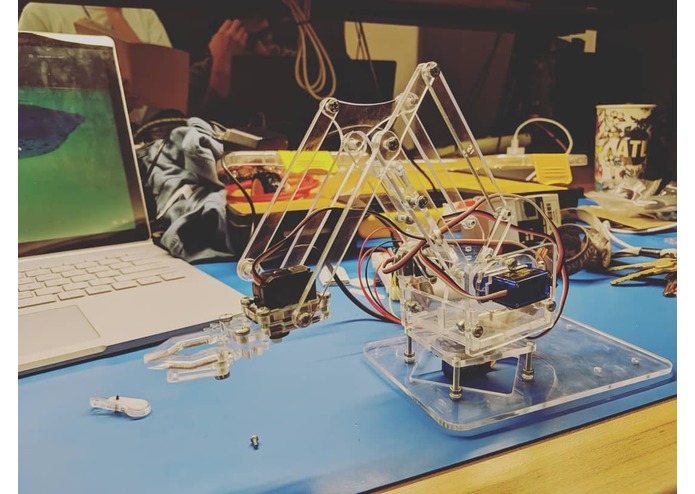
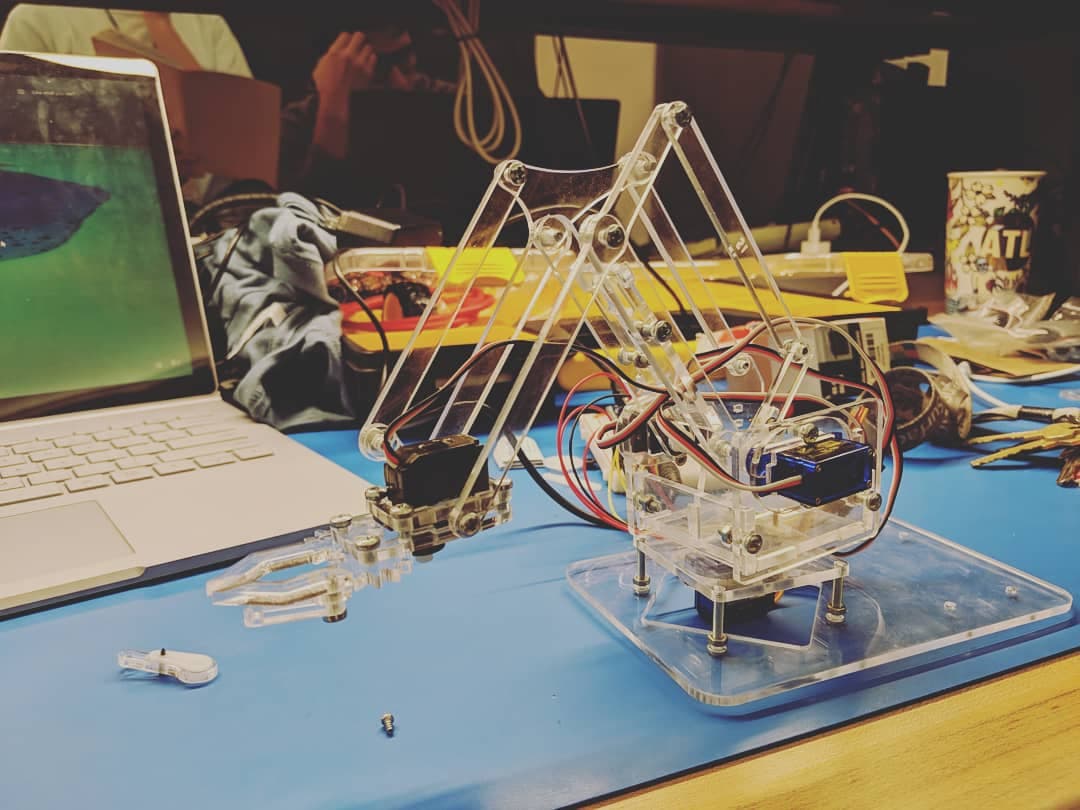
First picture of my creation!
-

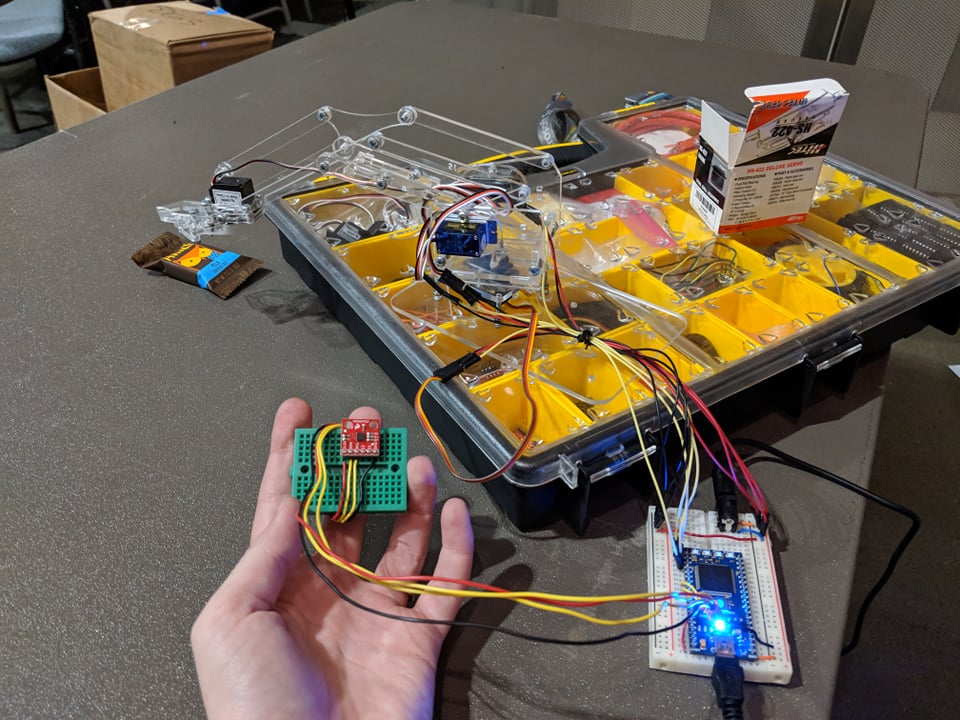
Final setup with accelerometer controls
Inspiration
So I'm going to be completely honest and say that this is actually a project for one of my classes that I decided to get done early. I had no better ideas and kinda just wanted to kill two birds with one stone. My lab partner and I wanted to make something silly, fun, and a little dangerous. We think that this project fits the bill pretty nicely!
What it does
This robot is a proof of concept for a multiplayer knife fighting game where two players control separate robots using an accelerometer based controller.
How I built it
I started with a simple robot arm design I found on instructables and some easy inverse (and forward) kinematics code available for the arduino. My class (ECE 4180 here at Georgia Tech) requires you to use the mbed so I had to translate all of the Arduino code into something that the mbed would understand (that includes libraries).
I took the design I found to the Hive, Georgia Tech's ECE makerspace, and spent the afternoon laser cutting and putting together the arm. After wiring it and working out all of the individual servo ranges, I finally had a working bot to play with!
The last step was to add simple IMU support (life pro-tip don't try to do this at 2:30am the night before).
Challenges I ran into
Ho boy... Well first of all I didn't know I was going to do this particular project until the morning of so I actually walked into this with zero parts. I went to Ace Hardware a few times during the competition and used some parts from a few of the labs I'm a part of to create what I have now. I also lost three laser cut parts and two screws in the process of putting things together so that was a sad time.
Following build instructions while tired is really hard and drinking coffee doesn't make it any easier.
The current update rate of the IMU is adding some challenges to what I had hoped would be a little faster paced of an experience. This can be fixed with using the mbed's RTOS threading libraries but honestly I don't have time for that now.
Accomplishments that I'm proud of
This is actually one of my first personal (more or less) projects that I've been able to see all the way through! I was one of the first to use the laser cutter in the Hive ever. It looks really magical when you move the accelerometer and the arm moves too:)
What I learned
I learned a TON about servos and how finicky they can be. Finding and adjusting their limits was one of the more challenging parts of this project.
I actually got to use inverse and forward kinematics in a real world application!
Hardware hacks are a big challenge, especially for only 36 hours.
What's next for Rock'em Sock'em But With More Danger
Well obviously this particular iteration isn't too dangerous...but that will be fixed soon! I plan on designing a mount for a knife at the end of this and making another since it wouldn't really be a fun multiplayer game with only one robot. I really enjoy the silly things in life, so I hope that this concept and the eventual reality of the project brings a little happiness to people! Oh also I'll use threads like a responsible computer science major. I promise!
Built With
- accelerometer
- c++
- laser-cutting
- mbed
- robotics
- servo

Log in or sign up for Devpost to join the conversation.