-
-
-
This image is currently processing. Please be patient...

-
Robotic Tumbleweed
Team Terrific Tensegrity
Adrian Botran | Alex Frye | Jacob Regenstein
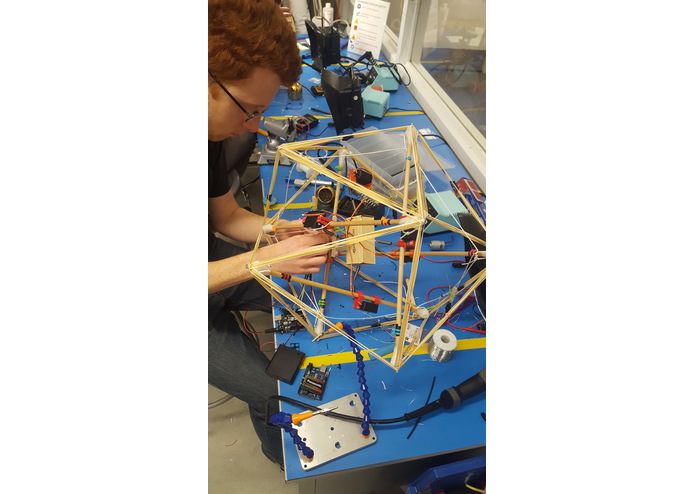
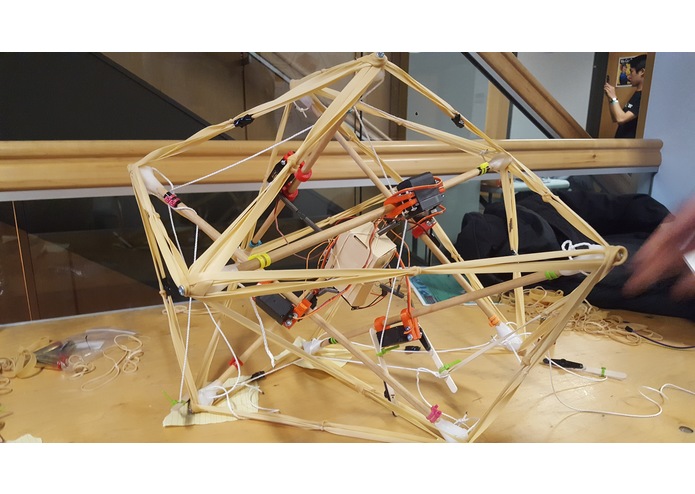
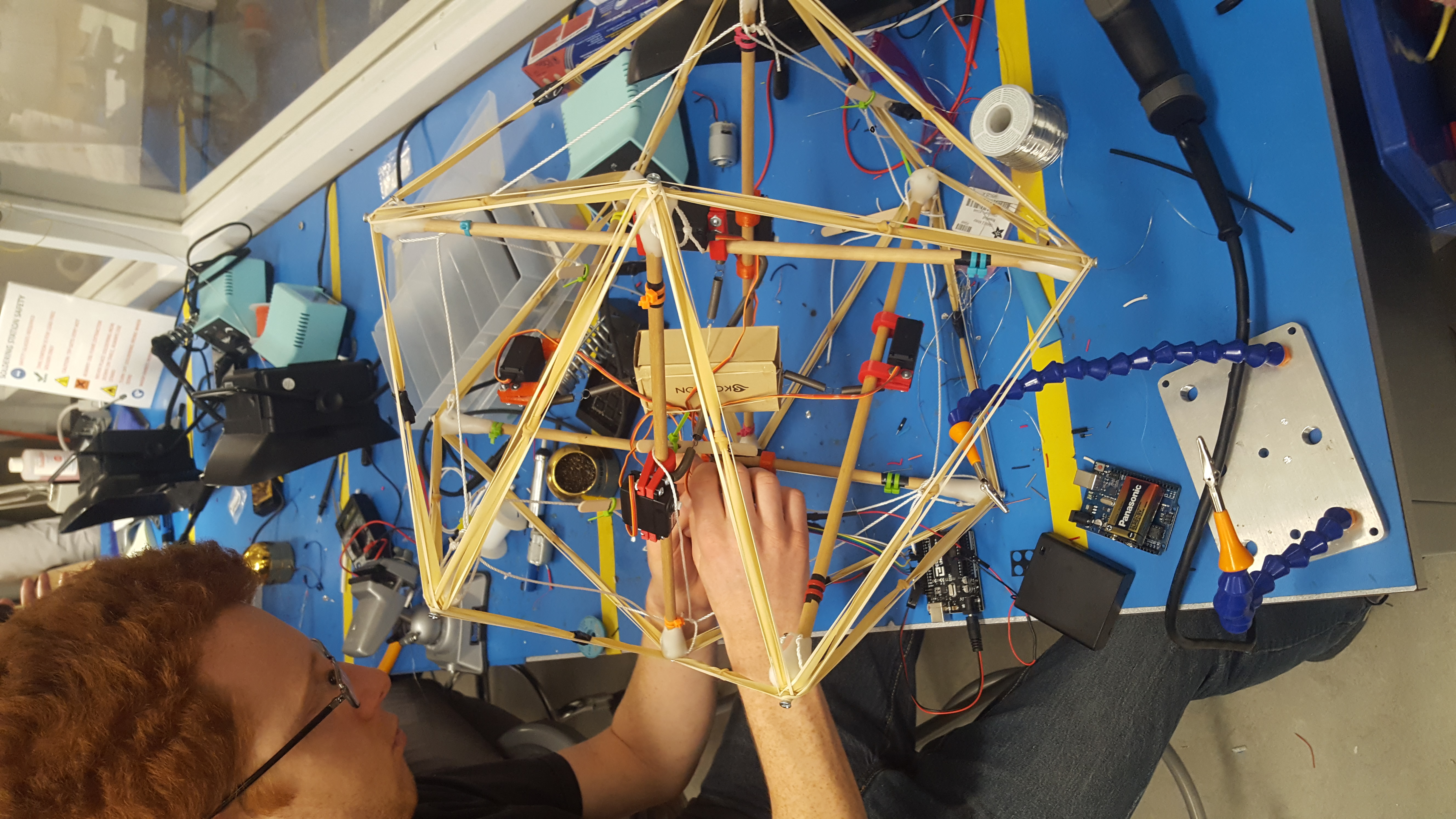
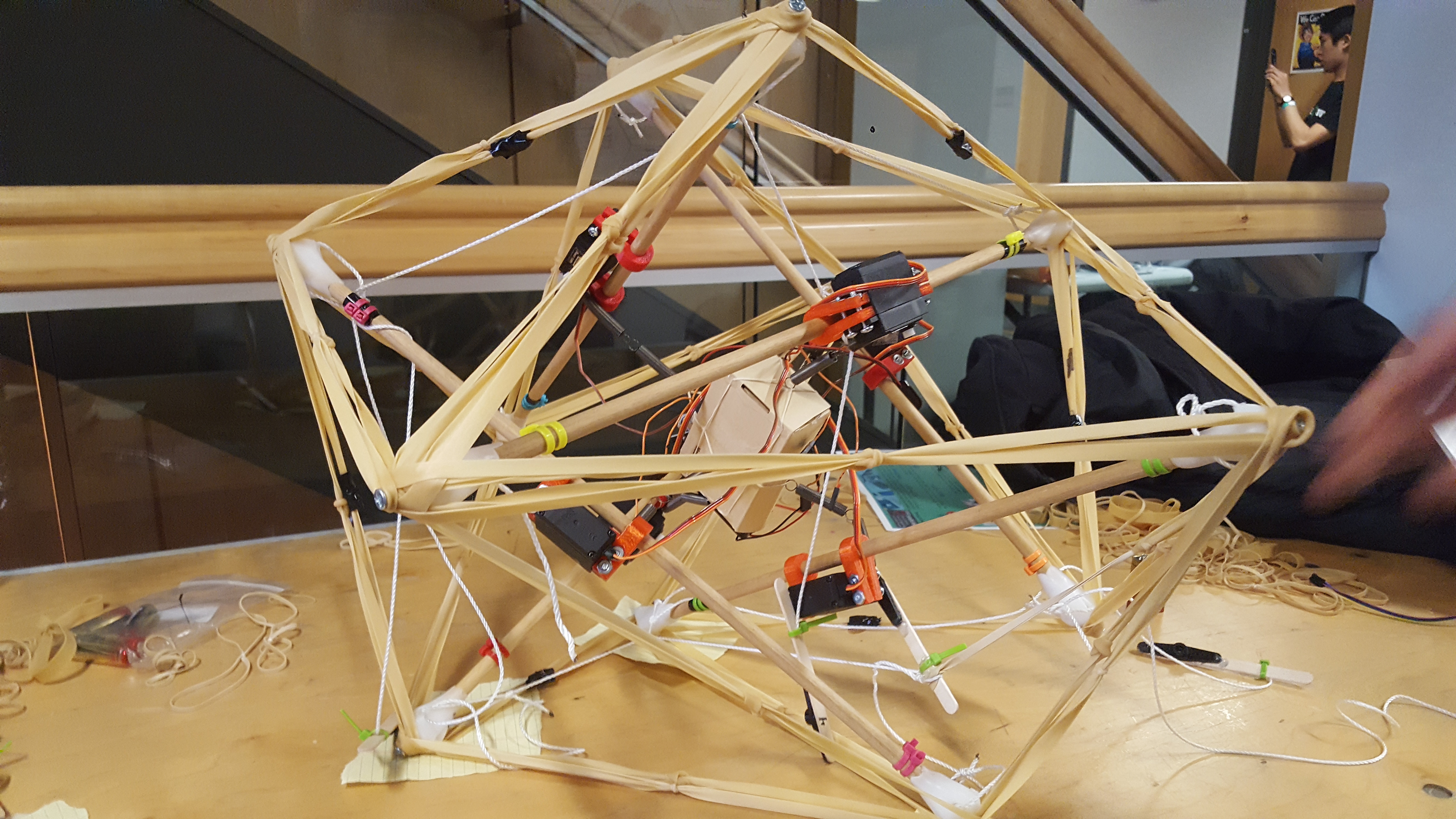
For MakeHarvard 2018, Team Terrific Tensegrity created a Robotic Tumbleweed to explore this non-conventional, challenging structure and design. The tensegrity icosahedron structure is comprised entirely of compression elements (dowels) suspended and constrained by a network of tension elements (rubber bands) connecting each dowel tip to its neighbors, creating a robust, compressible, and self-restoring structure. Mounted boy 3D printed clip on each dowel, a set of six Arduino controlled servos independently actuate lines running adjacent to the dowels and parallel to the rubber bands, changing the robot’s overall shape and allowing for omni-directional rolling motion. The batteries and Arduino are suspended in the center of the structure by springs attaching it to each servo. Due to its odd shape and complex dynamics, our robot is only capable of forward motion at the moment, though its capacity for motion in any direction could be greatly increased by applying deep reinforcement learning to develop stable, efficient, and agile locomotion gaits.
Though tensegrity robots have been developed by NASA and leading robotics research labs, the technology remains fairly unexplored despite both the technology’s valuable inherent attributes and numerous applications. Since tensegrity robots feature a lightweight, durable, all-terrain, and compactable design they provide an ideal platform for machine reinforcement learning, drone-deployed search and rescue, and exterrestrial exploration.



Log in or sign up for Devpost to join the conversation.