-
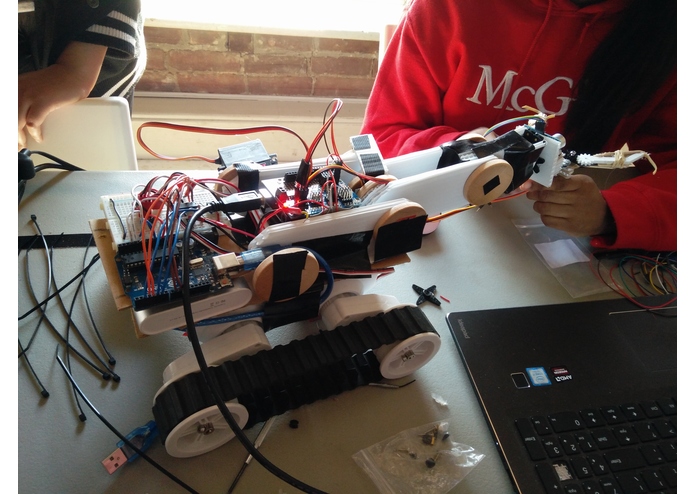
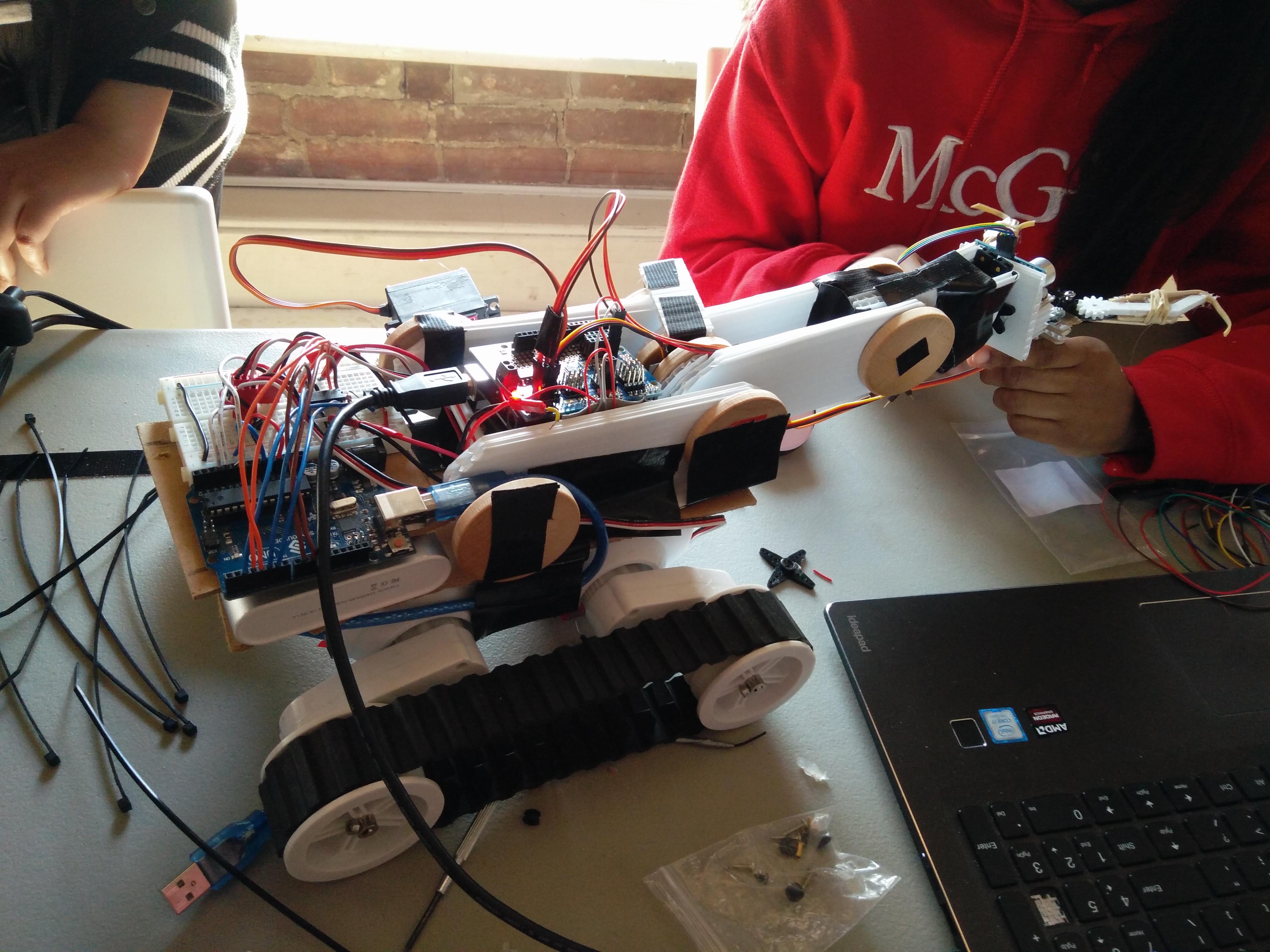
Robot being built
Inspiration
The initial idea
We wanted to build a hand/arm that is able to grasp onto objects and help people use this object.
Then we thought about having a hand able to communicate using sign language
Then we thought: maybe a hand that can play tic-tac-toe
Then we thought: maybe a shoe that ties itself... but then, well we wanted to make a hand in the first place...
Then we thought: well that's pretty hard so how about just picking up a spoon and feeding us
Then we thought: well maybe we wouldn't want to get food shoved in directly in our mouths
Then we thought: how about a robot that can pick up a bottle and pour for people
Then we thought: well that just sounds do-able (it wasn't)
What it does
The Service The Robot we built was supposed to pick up a bottle and pour into shot glasses for people to drink... Essentially a bartender robot, as we initially thought
How we built it
As we thought, We had a plan but Then we thought: Why follow it?
Challenges we ran into
Programming, troubleshooting, building a frame
Accomplishments that we're proud of
We actually made something!
What we learned
Project scopes need to be smaller. Code need to be clearer so that troubleshooting is easier.
What's next for Robotic Robot Bar Bartending Bartender
Actually pouring drink
Built With
- arduino
- ducktape
- hope-and-dreams
- hot-glue

Log in or sign up for Devpost to join the conversation.