-
SandwichBot
Inspiration
We were inspired by robotic arms, that are used in factories to make the vehicles. They were able to work with such efficiency, we knew we wanted to build something similar. With this in mind, we knew that building a robotic arm to make a car was illogical. So, we set our sights on a robotic arm to make sandwiches.
What it does
The Robotic arm is controlled through 3 servo motors. The servo motors allow us to get 360 degrees of rotation. Each servo motor is programmed to move in a synchronized manner with the other servo motors, allowing for smooth motion. They work together to grab different desired ingredients for a sandwich, and build it on a plate. The plate, attached to drone, is then sent to a location automatically, and the sandwich is delivered.
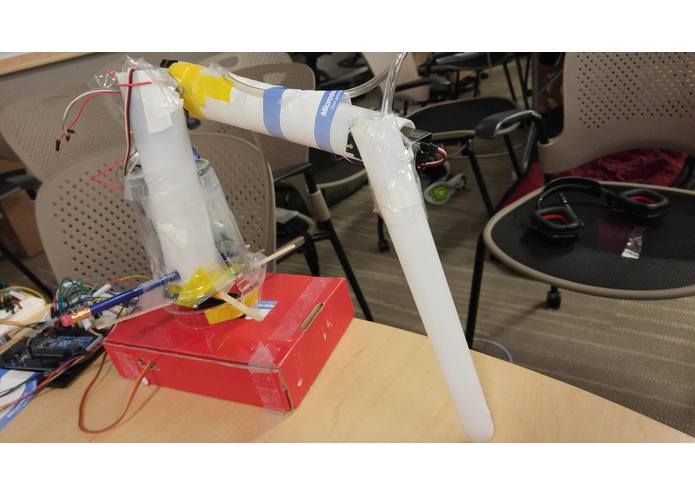
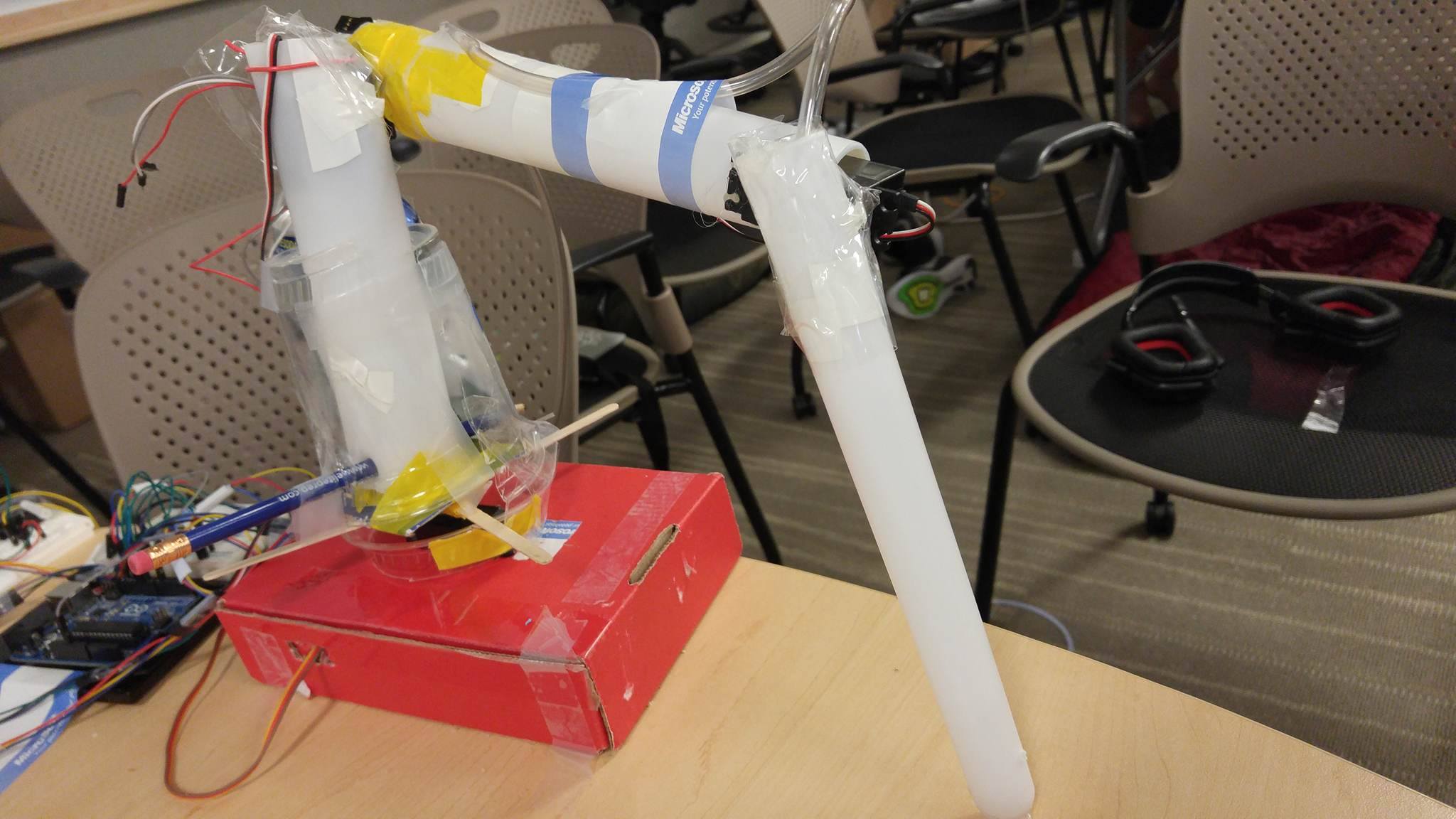
How I built it
We used 3 tubes, and 3 servo motors to act as pivot points that we control. We used a vacuum tube to use suction to grab the ingredients. The arm is controlled through an Arduino circuit. We then attached a plate to a drone, and built an automated program.
Challenges I ran into
It was difficult to fasten the base servo motors, without the entire arm tipping over. We overcame this by adding a counter weight to this, so there was minimal tipping.
Accomplishments that I'm proud of
I am proud that we were able to build a working robotic arm in just 24 hours, and that it is able to assemble food.
What I learned
I learned a lot about the challenges of building a robotic arm. I also learned about coding an drone to fly autonomously.
What's next for SaaS
We could actually ship our product, or we can do the logical thing and sell cheap robotic arms.
Built With
- arduino
- can
- elite
- git
- github
- javascript
- node.js
- pencil
- python
- servo
- sms-gupshup
- sprite
- tube






Log in or sign up for Devpost to join the conversation.