We were inspired by self-driving cars and robotic competitions where precision and adaptability are key. Robotic Anxiety reflects the challenge of making quick, calculated decisions under pressure.
Robotic Anxiety navigates mazes, avoids obstacles, and places flags with precision. Using sensors and programmed logic, it adapts to challenges and maneuvers through complex environments.
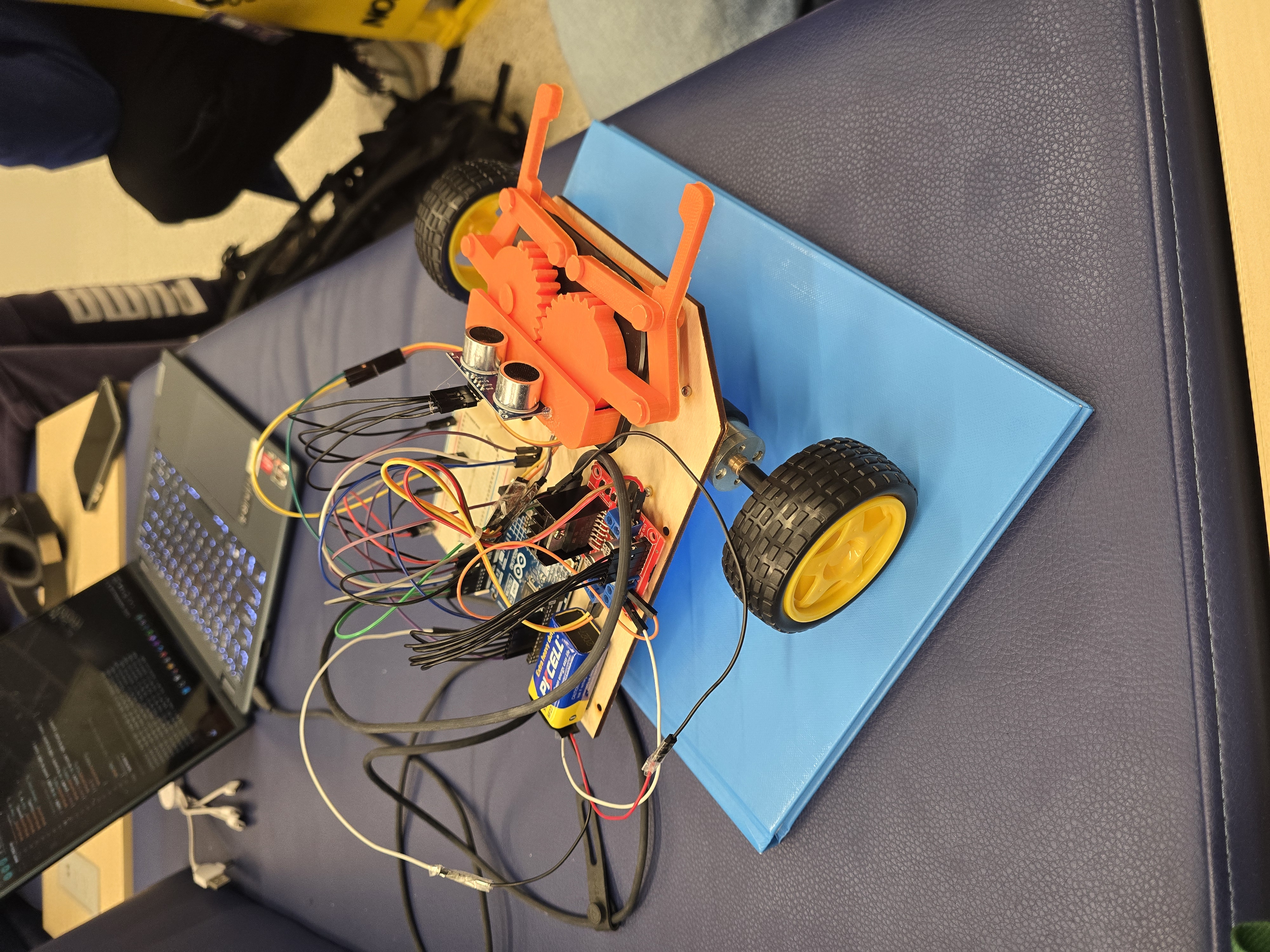
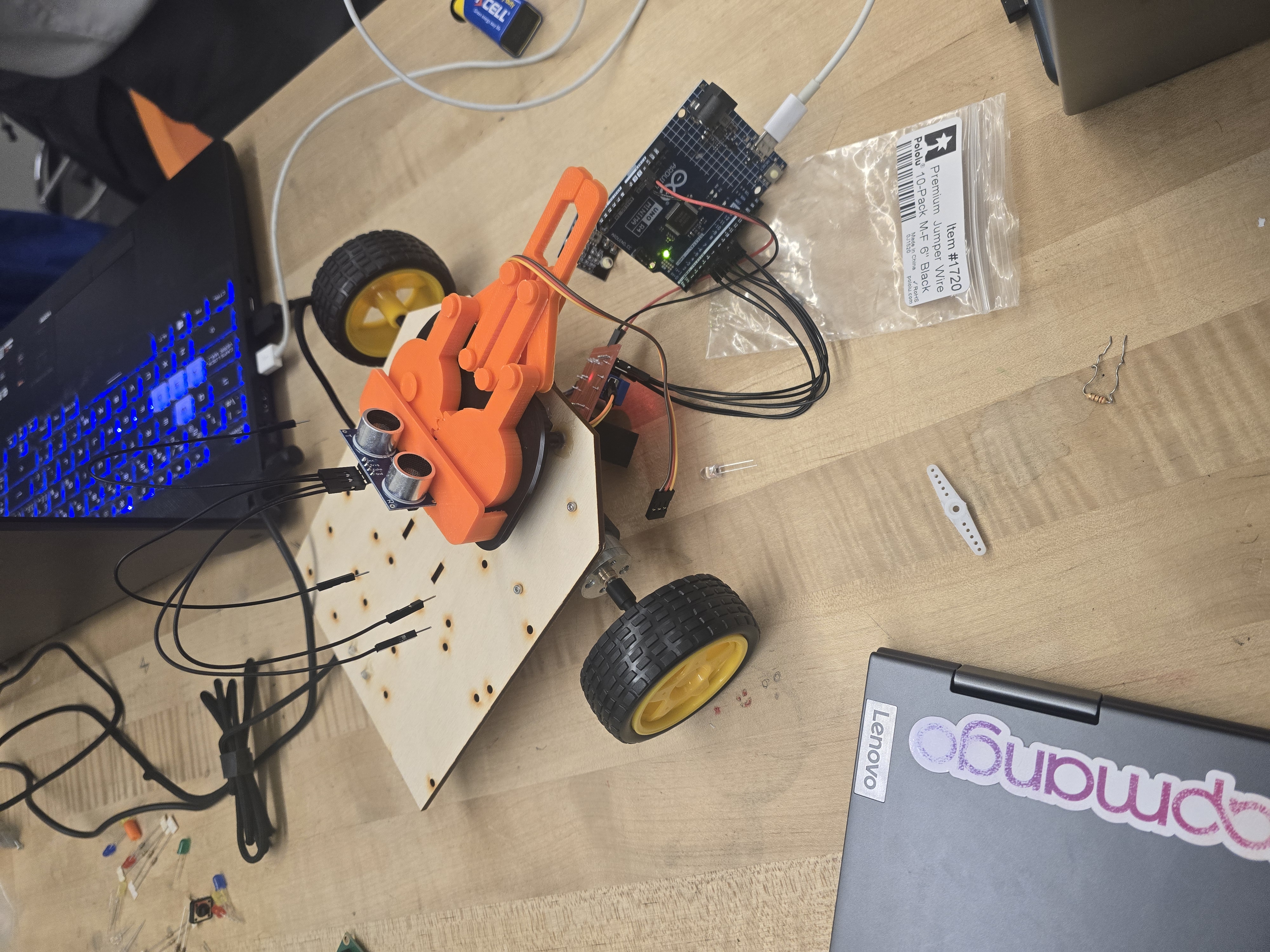
We built Robotic Anxiety using a microcontroller, sensors, and motors for precise movement and obstacle detection. The chassis was 3D-printed for durability, and the car was programmed in Arduino to navigate mazes and place flags accurately. Careful tuning of sensor inputs and motor controls ensured smooth performance in various challenges.
Fine-tuning sensors for accurate real-time obstacle avoidance was tricky, especially in tight spaces. Developing an efficient pathfinding algorithm that could adapt to unexpected turns and dead ends.
We collaborated seamlessly, combining our skills in hardware, software, and problem-solving to make this project a reality.
We gained hands-on experience with integrating sensors for real-time feedback and obstacle detection. We improved our skills in Arduino programming, especially in controlling motors and sensors for precise movement. Working on time-sensitive challenges taught us how to adapt quickly and find creative solutions. We learned how to effectively communicate and work together to tackle both hardware and software challenges.
Adding more sensors for better environmental awareness and smoother navigation through complex spaces. We're working on refining the pathfinding algorithm for faster and more efficient maze solving.


Log in or sign up for Devpost to join the conversation.