-
-
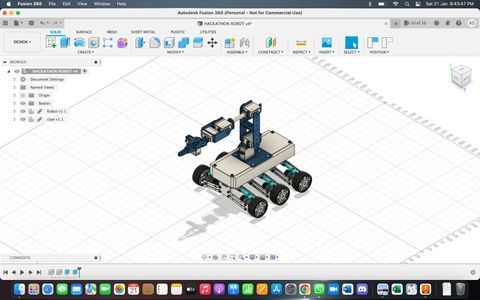
robot
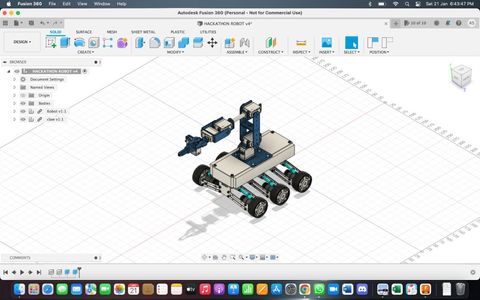
The robot is also power efficient. The robot has a generator which generates power through the kinetic energy produced when the robot is moving and there is an alternator installed. The alternator uses the energy from the generator and divides the energy equally throughout the 6 wheels. All the wheel drive is independent and has suspension which can make the robot drive over any obstacle and can extend its range to the outdoors also.
There is also an adjustable claw which can be used for grabbing items and the claw can be extended so it can open doors and pick items from high places.



Log in or sign up for Devpost to join the conversation.