-
-
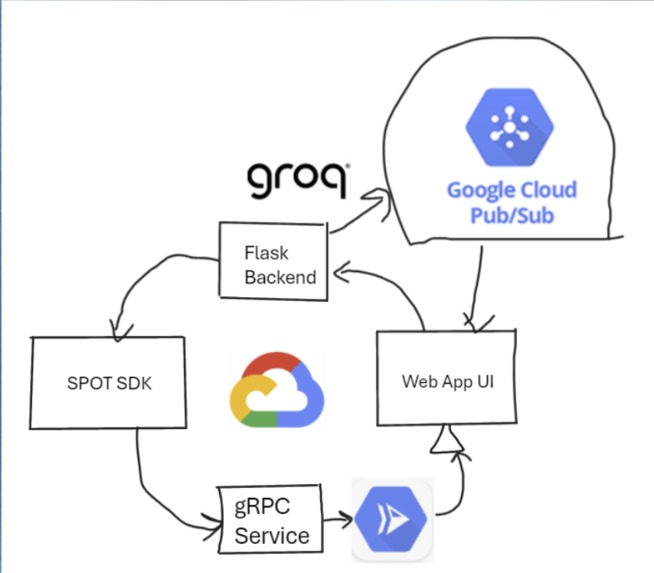
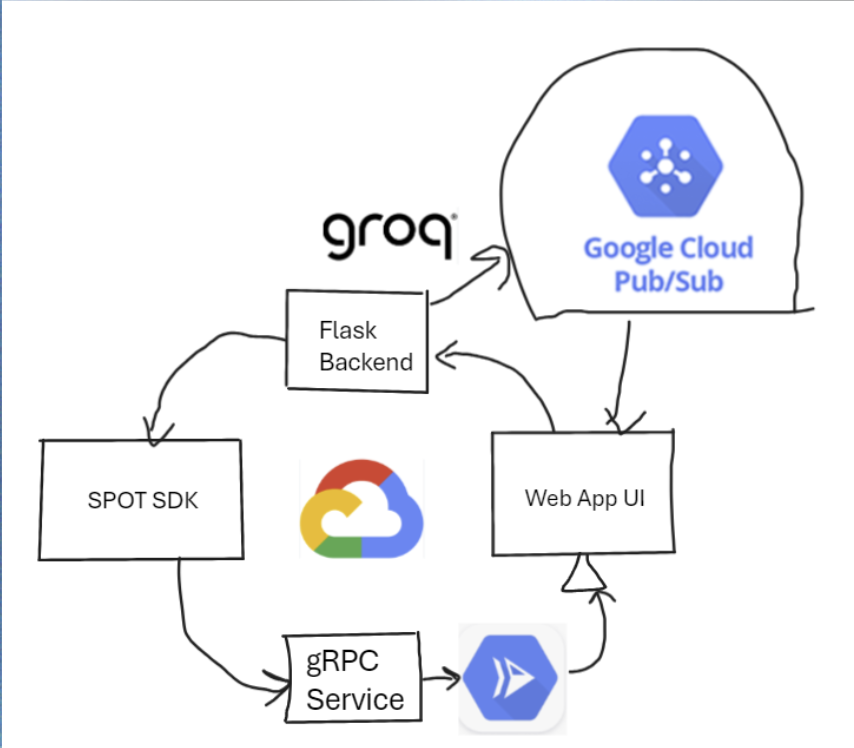
architecture
Inspiration
In emergency situations like fires, every second counts, and clear communication is crucial. We were inspired by the potential of Boston Dynamics' Spot to assist in rescue operations by bridging language barriers and navigating hazardous environments, made possible with flame-retardant polyurethane foam used to make Spot. The idea of a multilingual robotic assistant that could locate victims and aid firefighters motivated us to create Pyro Machitis.
What We Learned
Developing Pyro Machitis taught us the importance of interdisciplinary collaboration. We gained hands-on experience with robotics integration, real-time language processing, and user interface design. We also learned how to use multiple APIs together to make a functioning application.
How We Built the Project
Hardware Integration: Enhanced the Boston Dynamics Spot robot with high-resolution cameras to detect victims in a fire.
Software Development: Utilized the Bosdyn API to program movement software controlled remotely and relay the video and audio to the controller.
Multilingual Communication: Leveraged Groq's AI accelerators and Google Cloud Platform to enable real-time translation and communication in over 15 languages.
User Interface: Created an intuitive UI using HTML, CSS, and Flask for operators to monitor and control the robot effectively.
Backend Systems: Integrated systems using Bosdyn for robot control, Groq for AI processing, and GCP for data management.
Challenges We Faced
New Technology: Working with Boston Dynamics was a first for all of us, and it required us to read and understand complex documentation and conduct extensive testing to make it work as intended. Accessing Spot's hardware had complex requirements that we had to overcome.
Integration Complexity: Combining hardware and software from multiple platforms required extensive testing and problem-solving, especially since the hardware can function remotely without being physically connected to the front end.






Log in or sign up for Devpost to join the conversation.