-
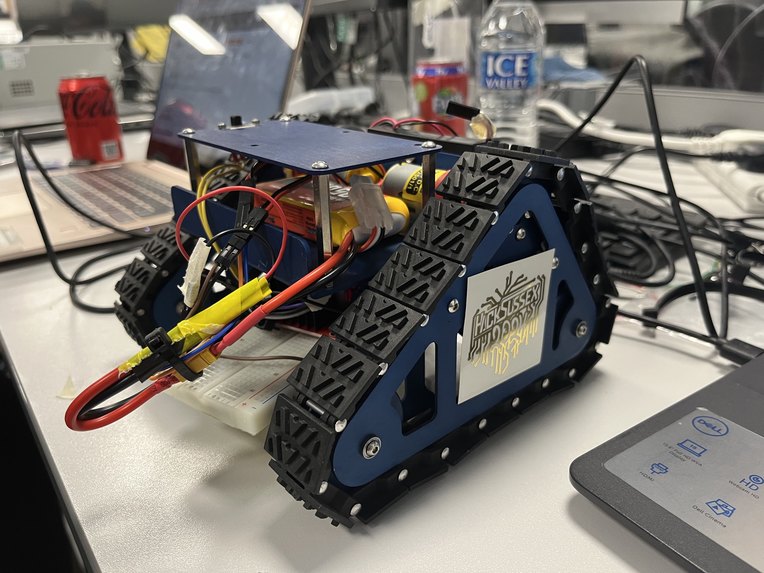
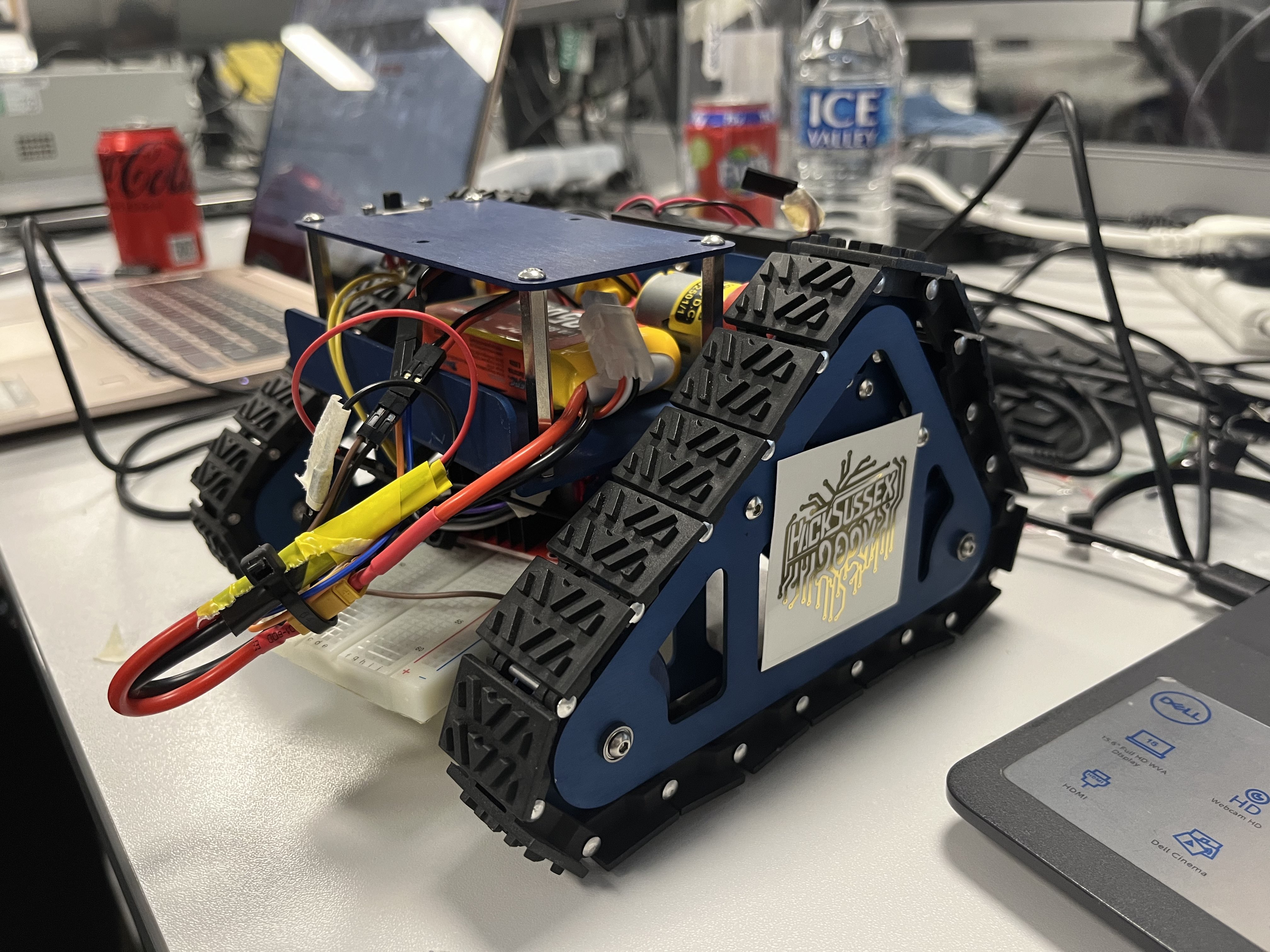
Final rover (Front) (Without robotic hand)
-
Final rover (Back) (Without robotic hand)
-

Building the rover skeleton
-
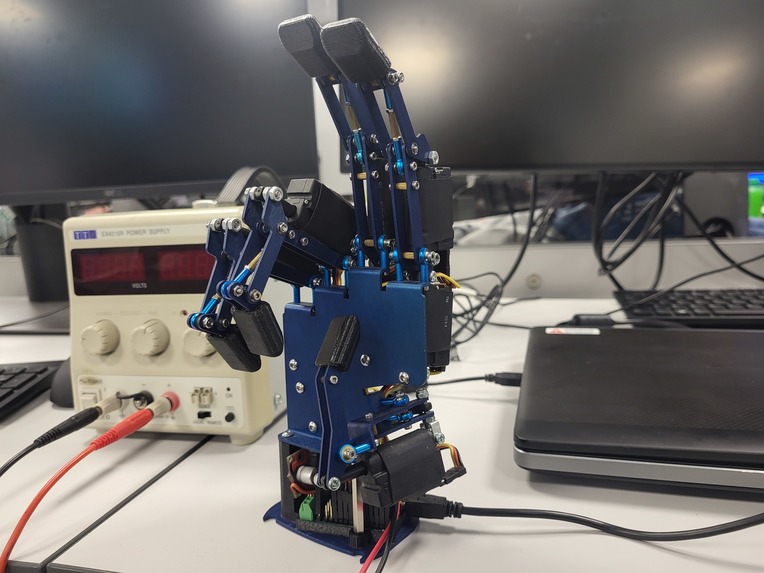
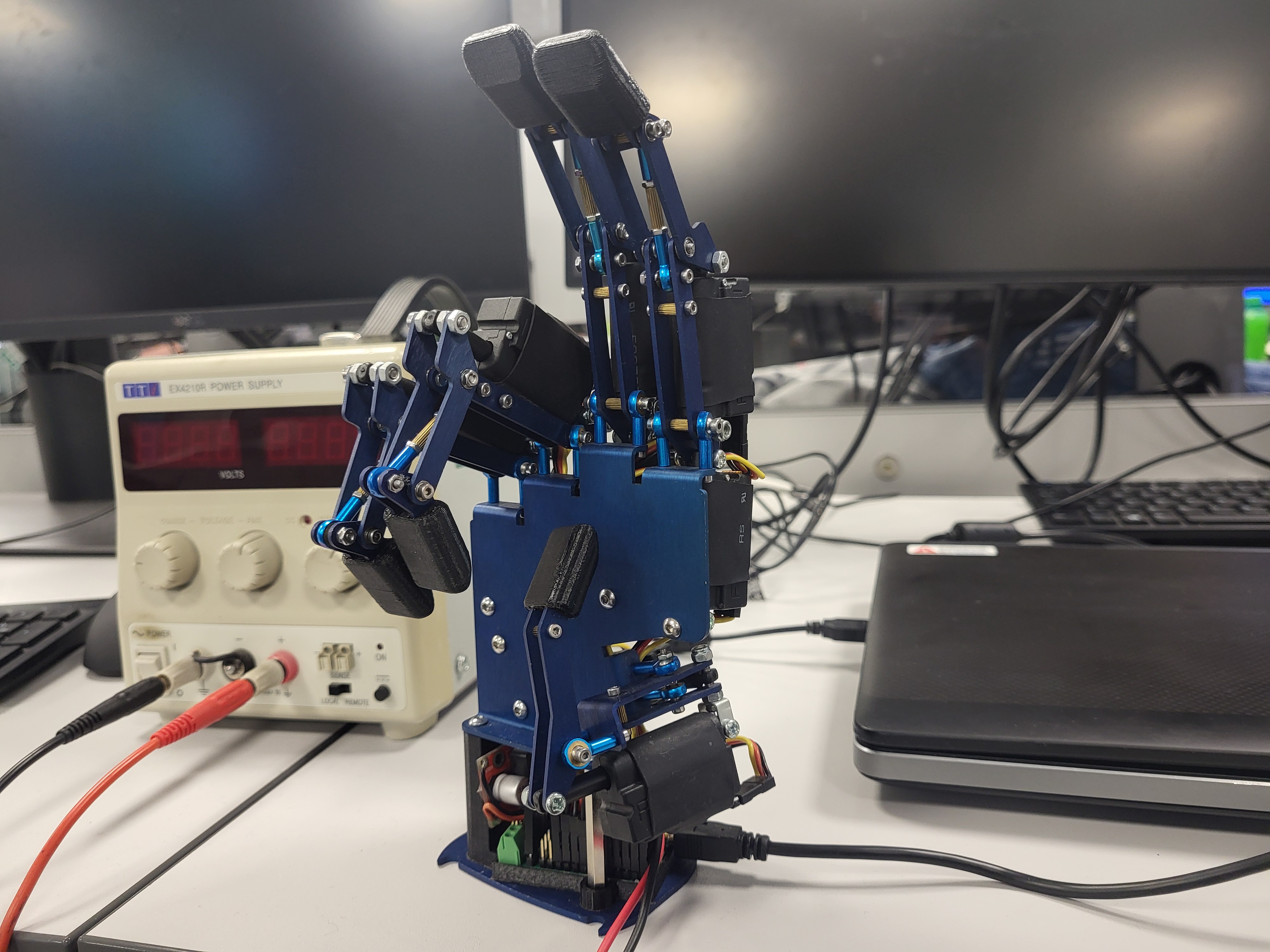
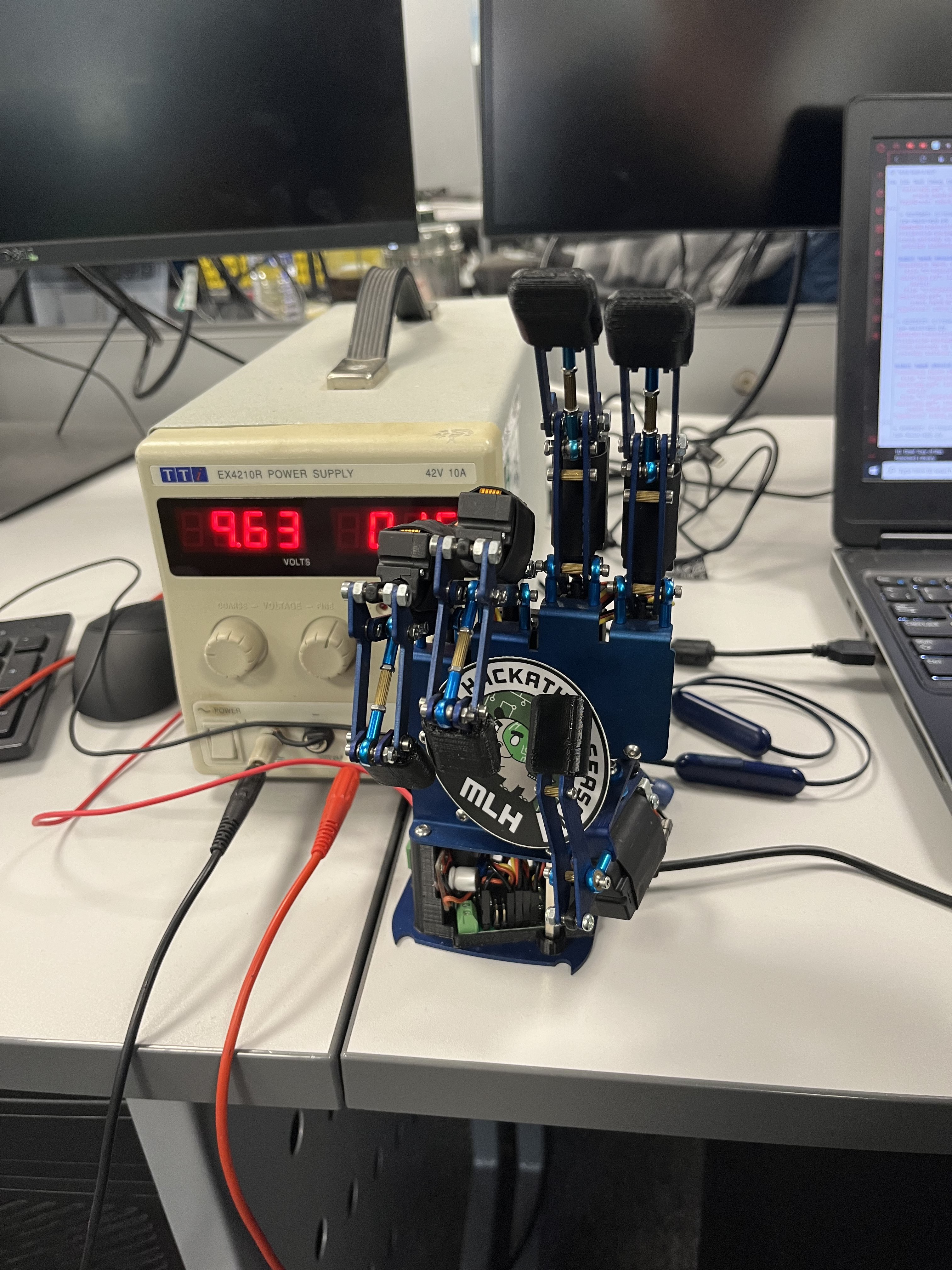
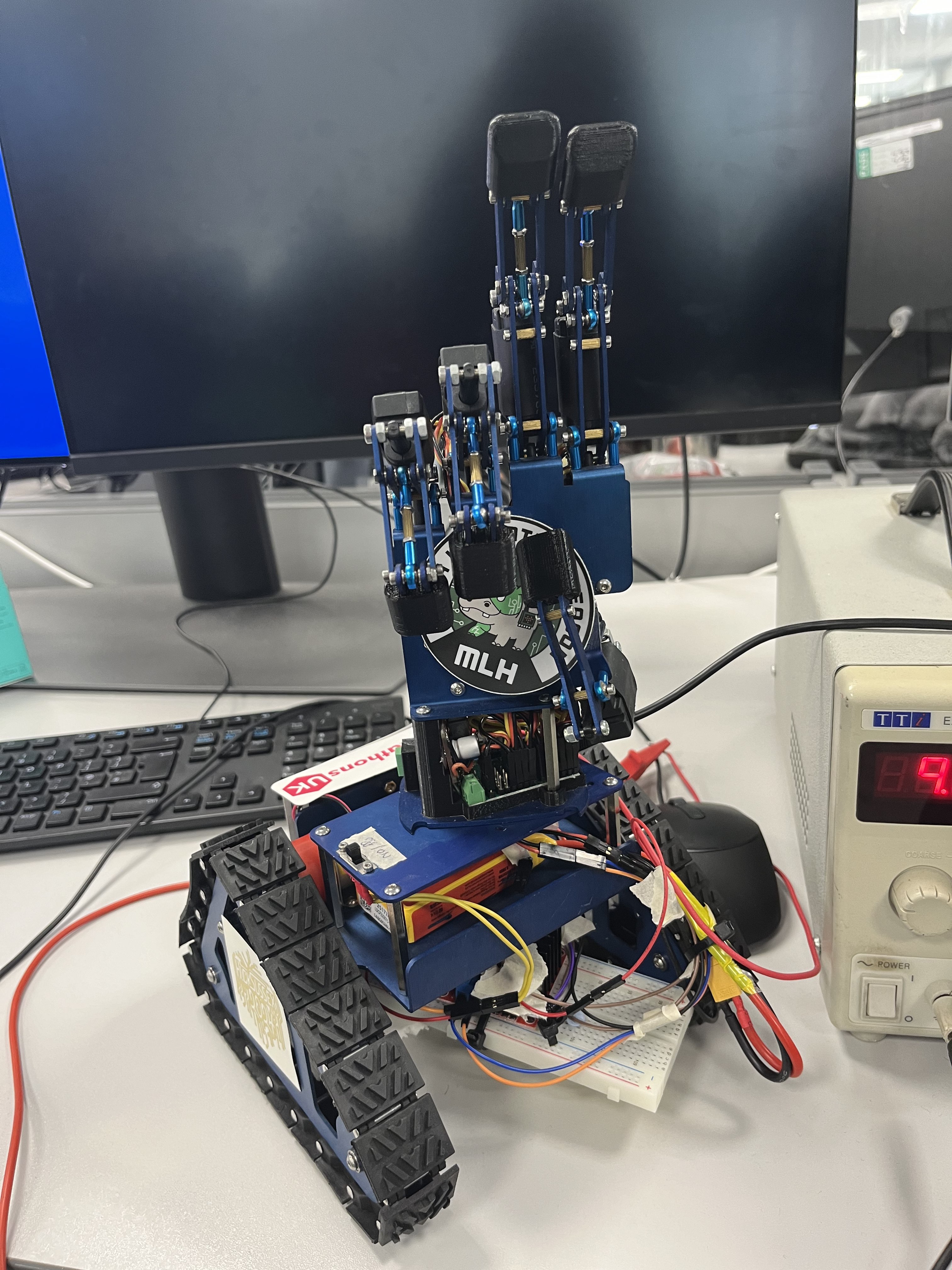
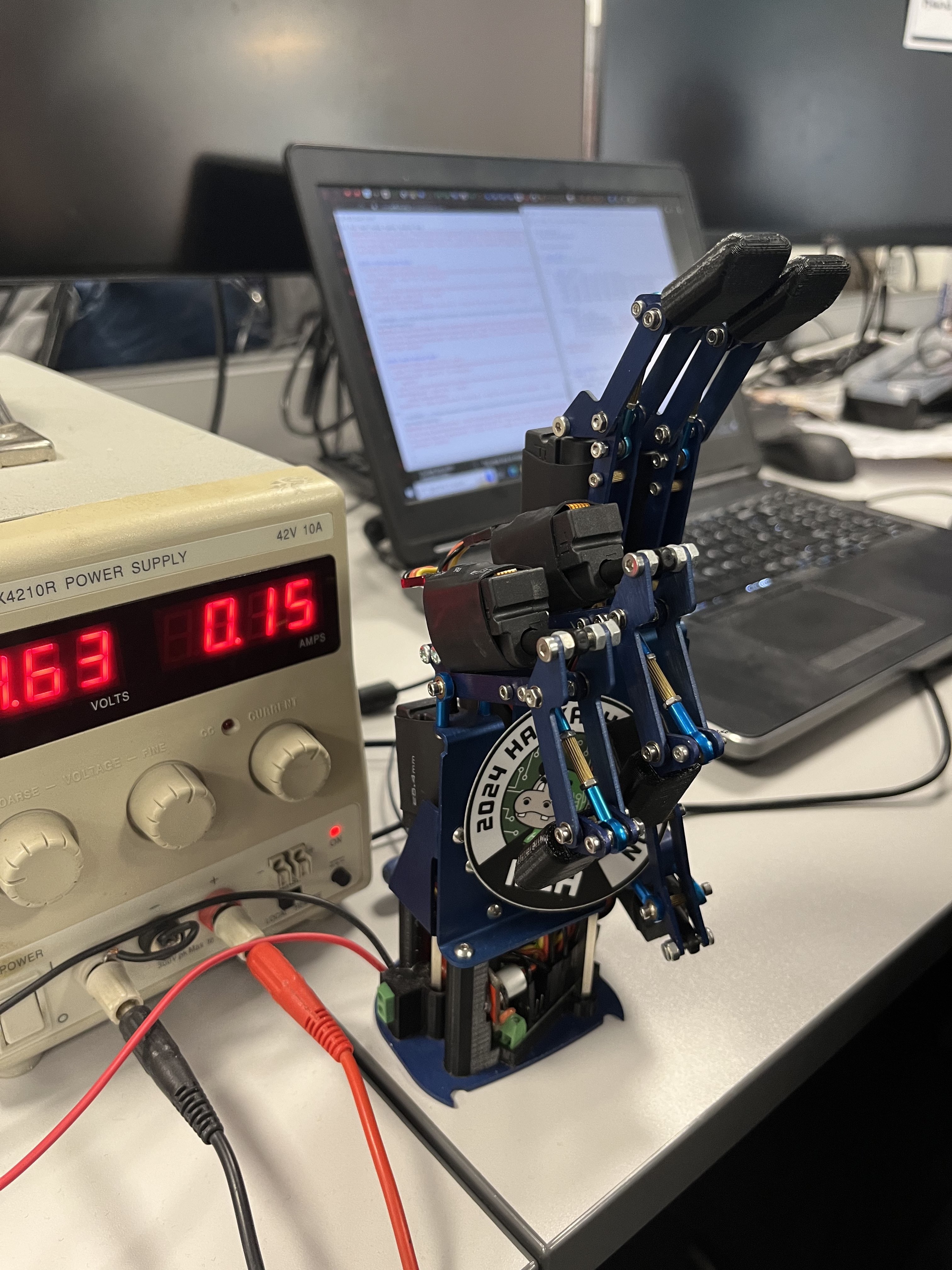
Robotic hand
-
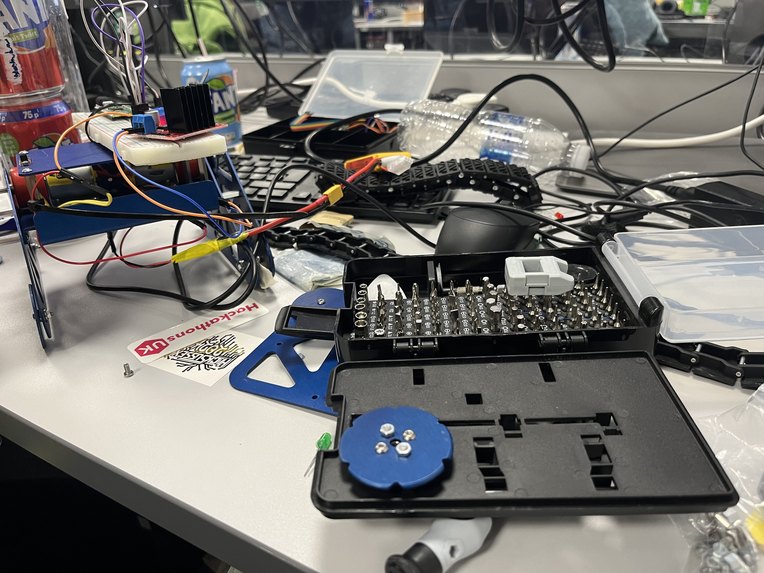
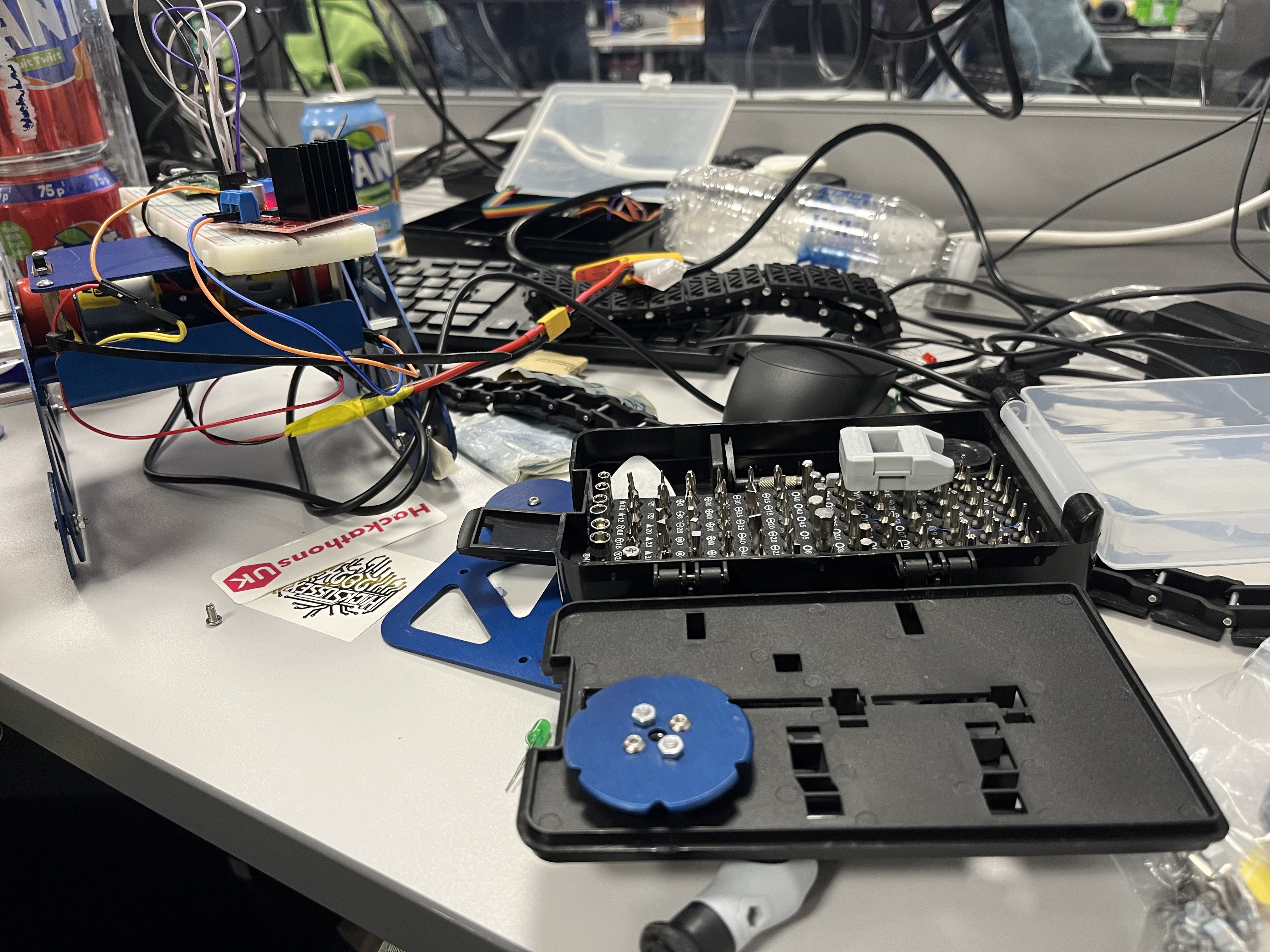
Using iFixit kits to assemble rover and secure wires
-
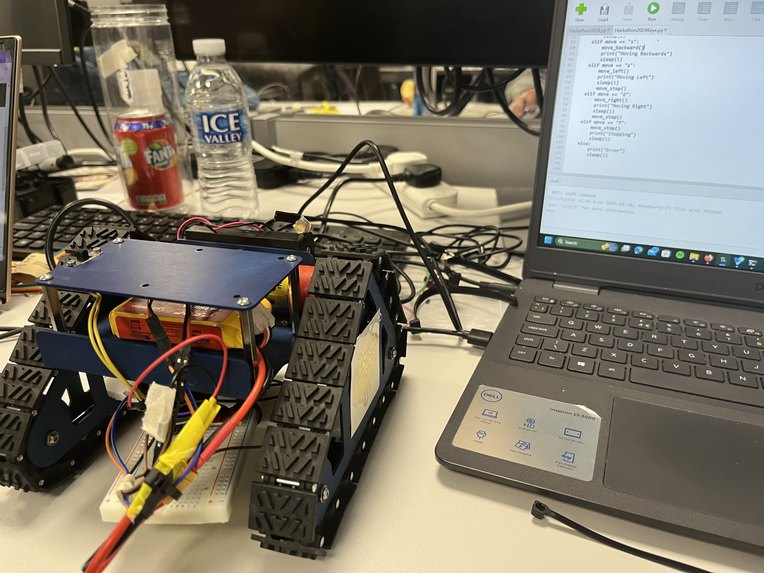
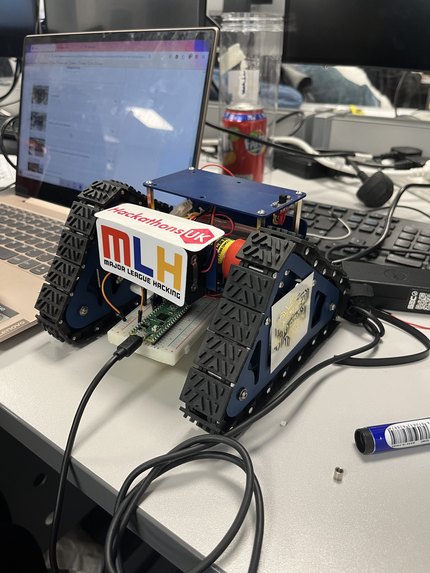
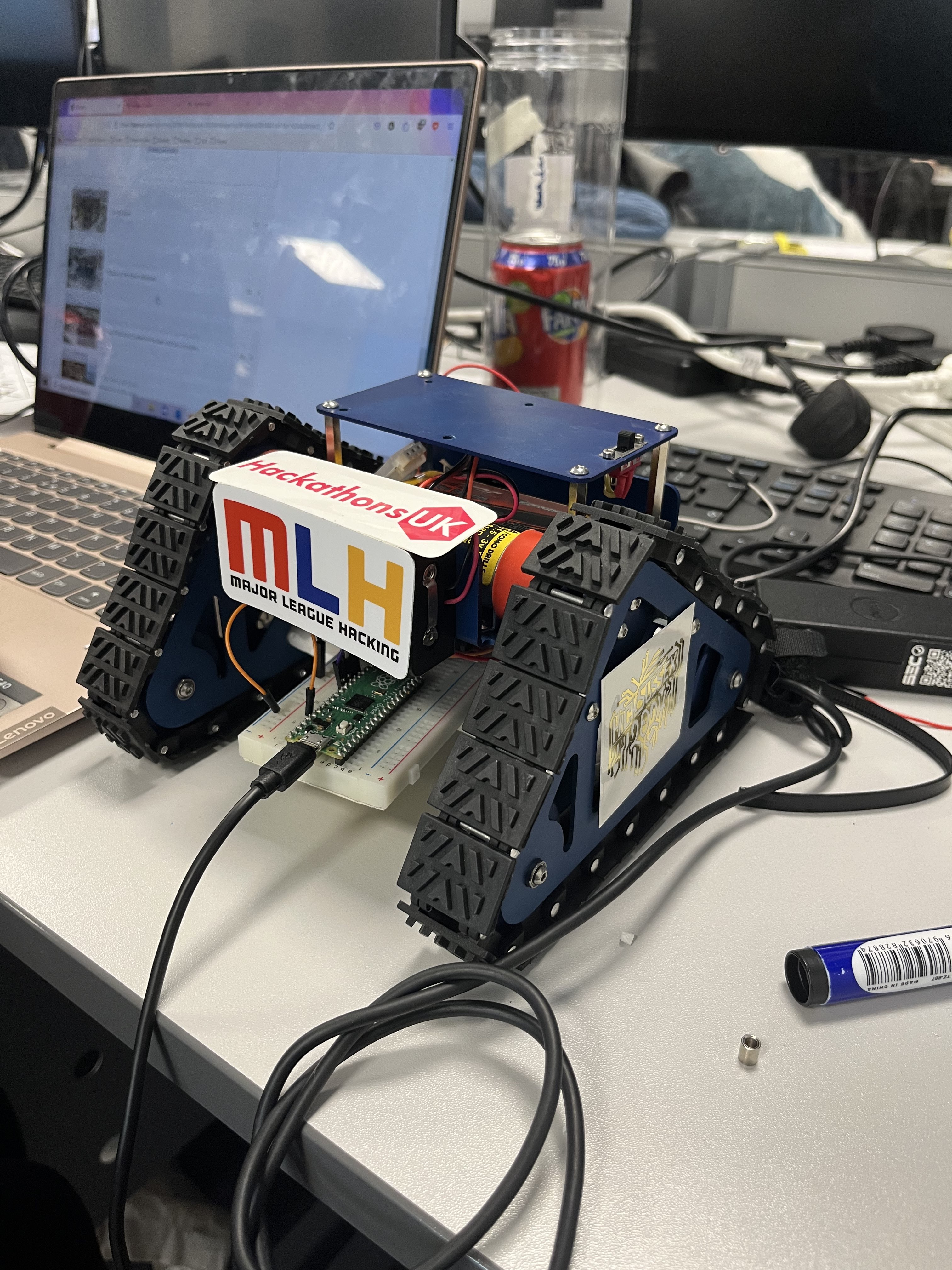
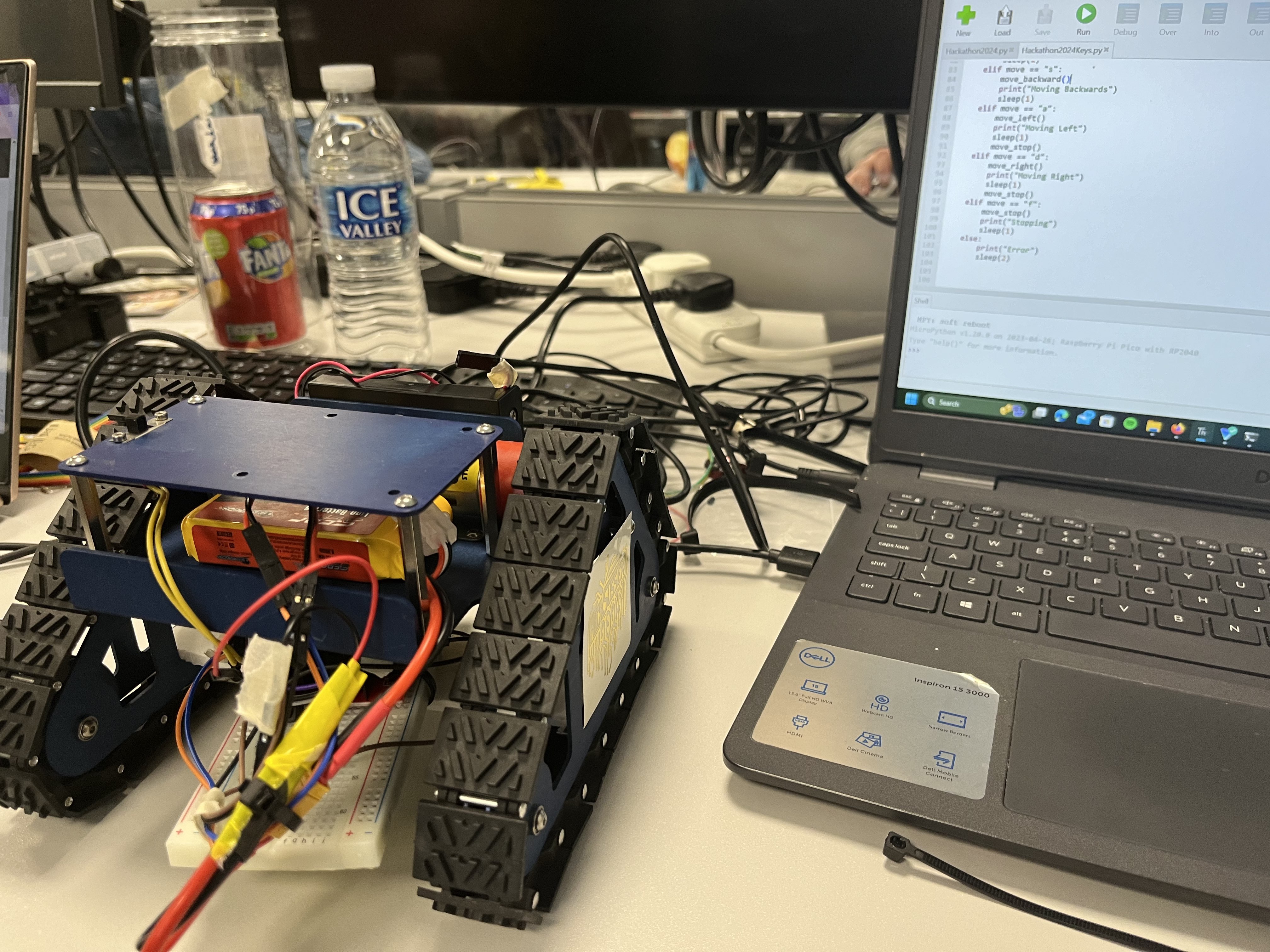
Final rover with code
-
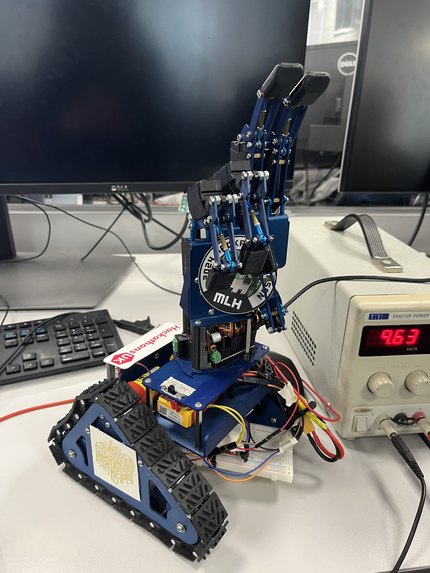
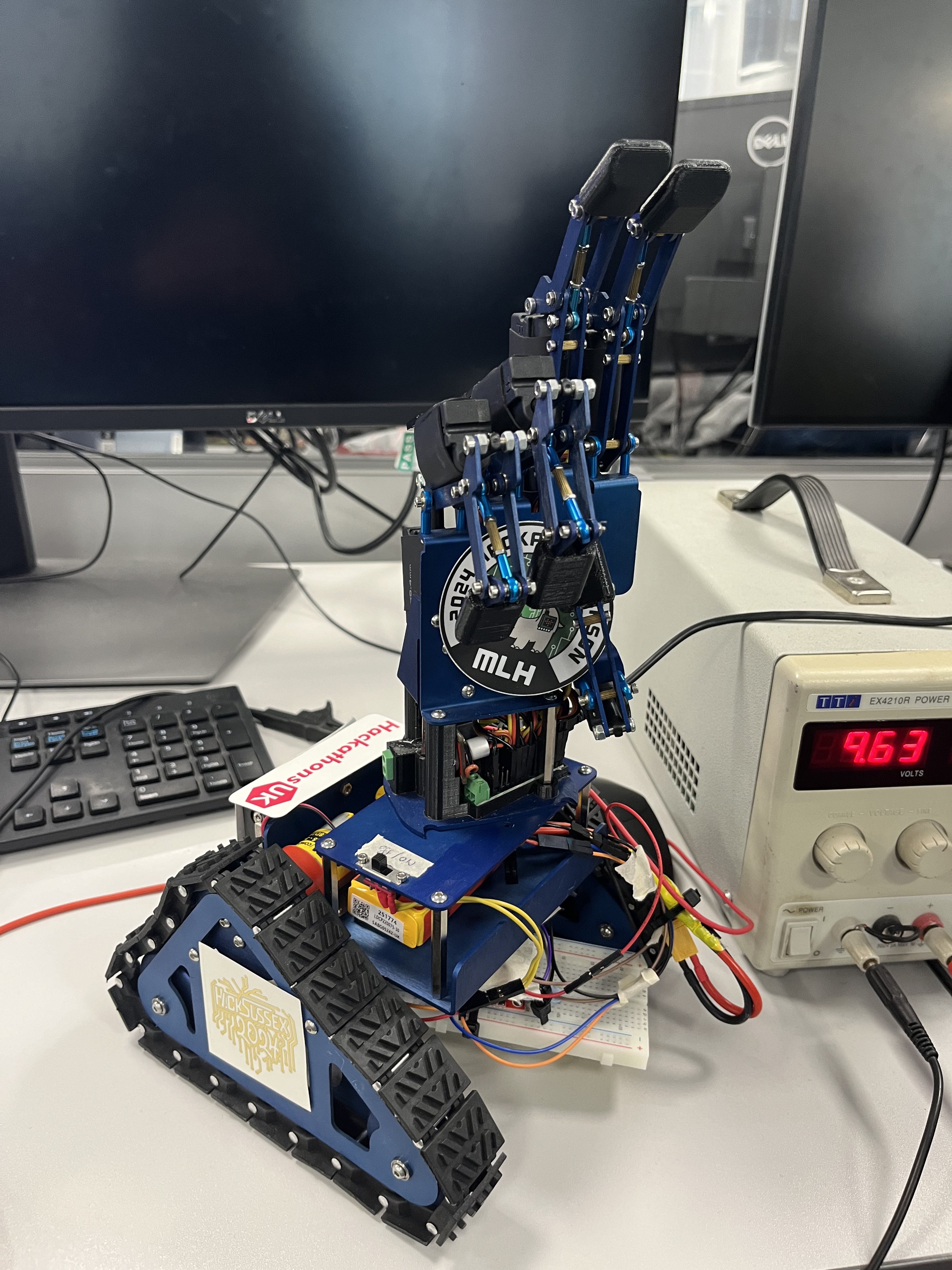
Final robot with both parts
-
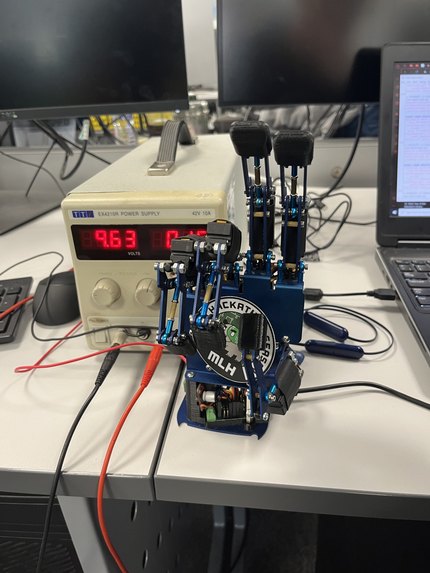
Robotic hand (Peace)
-
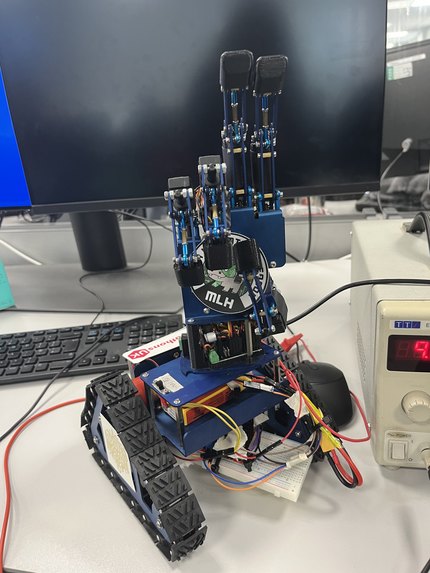
Final robot with both parts
-
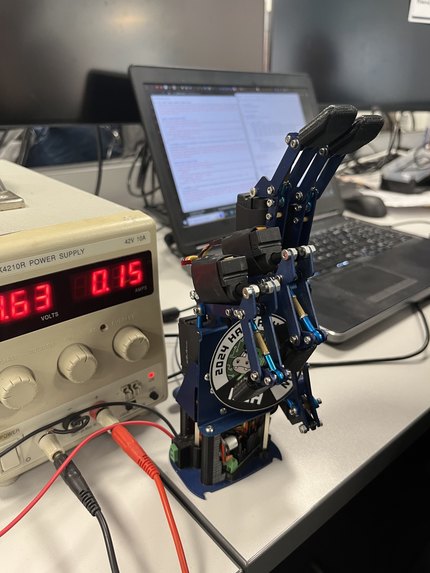
Robotic hand

Inspiration
We wanted to do something using the hardware provided so came up with a project idea using some of the hardware we found most interesting.
What it does
In theory it should move based on the hand gestures of the user. Right now we have all of the individual parts working but not combined. The rover is able to move left, right, forward and backward, whilst the hand is able to make different hand gestures.
How we built it
We used a rover kit to build the robot, and a Pi Pico to program it to move (Python). We used Python for recognising hand gestures and moving the hand.
Challenges we ran into
The robot had some issues with the motors not staying secure and breaking due to them not being secured properly. We also had problems with the rover breaking every time we tried to test it as it would break due to the lack of washers. We tried to fix this by making washers out of a Pepsi bottle however this didn't work and we switched rovers to one that worked. Some of the code we needed to use was outdated.
Accomplishments that we're proud of
Building a rover that works. Being able to get the robot's hand to move. Training a model to recognise hand gestures.
What we learned
How to build a robot and program it to move using Python. The importance of testing each part to find what is making it break
What's next for Robot
Combine all the parts so the robot moves using hand gestures.
Built With
- medipipe
- python
- thonny






Log in or sign up for Devpost to join the conversation.