Inspiration
The quadrupeds at Boston Dynamics were our inspiration in designing this robot.
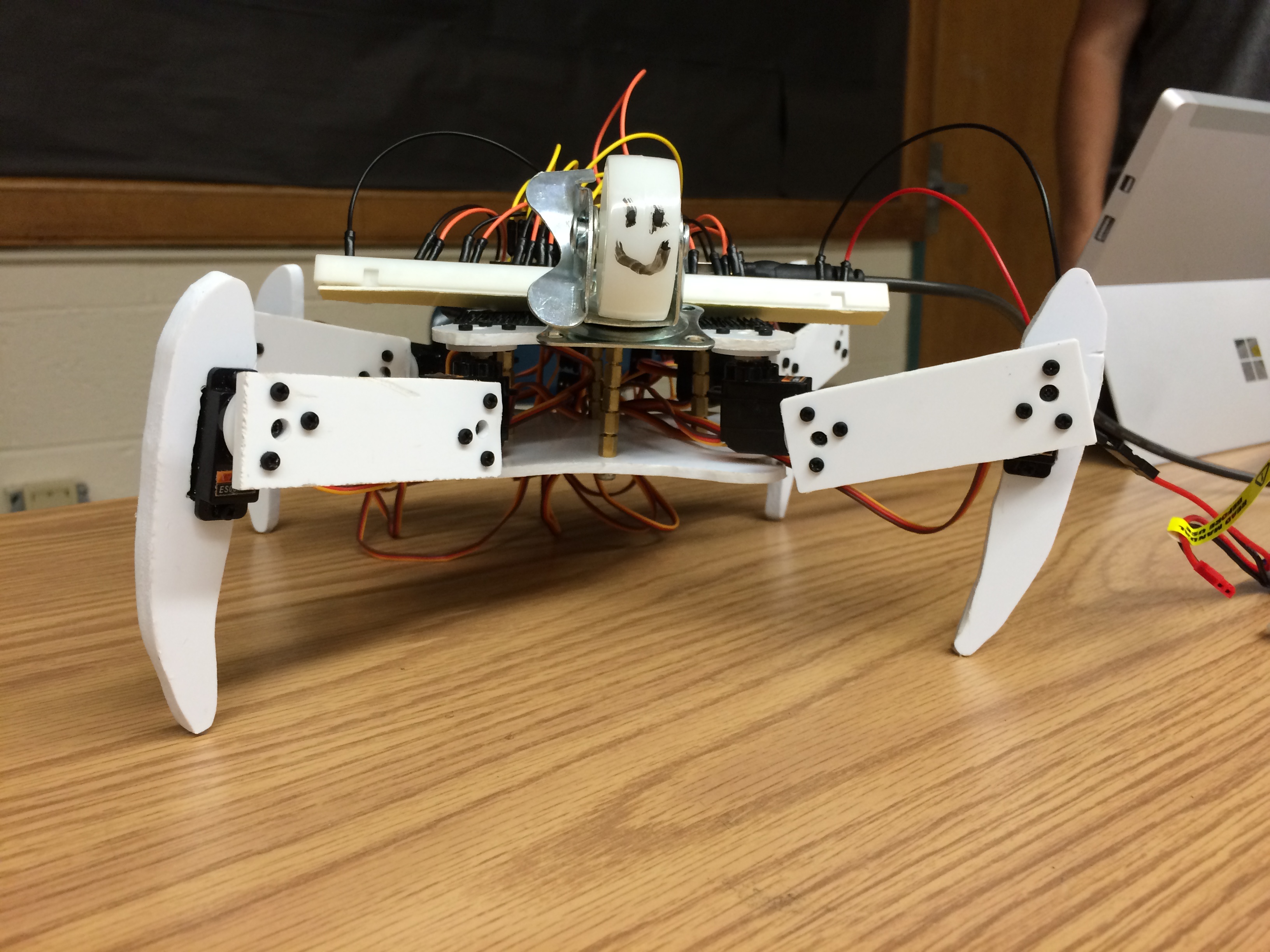
What it does
It has two different walking gaits as well as exact coordinate movement for singular legs
How I built it
I did the hardware over the summer. It was built from scratch in my basement and we wired and programmed it today.
Challenges I ran into
We spent hours troubleshooting the wiring. In the end it turns out the problem was a bad breadboard. We also ran into numerous programming challenges, most of which were syntax errors.
Accomplishments that I'm proud of
Honestly the accomplishment I am most proud of was figuring out the breadboard issue.
What I learned
Our whole team learned a lot about Arduino, programming robots, and electronics.
What's next for Robot Spider
I definitely plan to add some sensors as well as refining the hardware. After that I plan to optimize the walking programs and eventually get it to climb stairs.
Built With
- arduino
- plastic
- servos

Log in or sign up for Devpost to join the conversation.