-
-

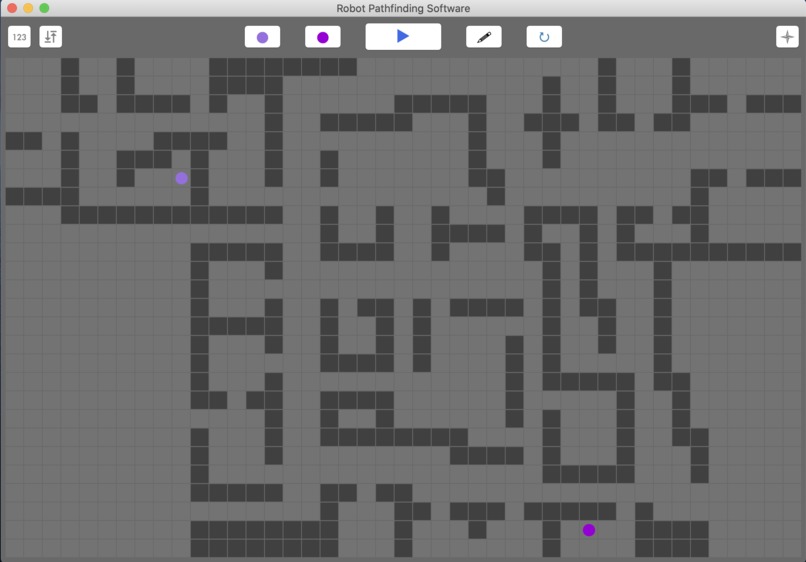
Blank Map
-

Riverside Hospital that was Mapped
-
Hospital Map with Boundaries
-
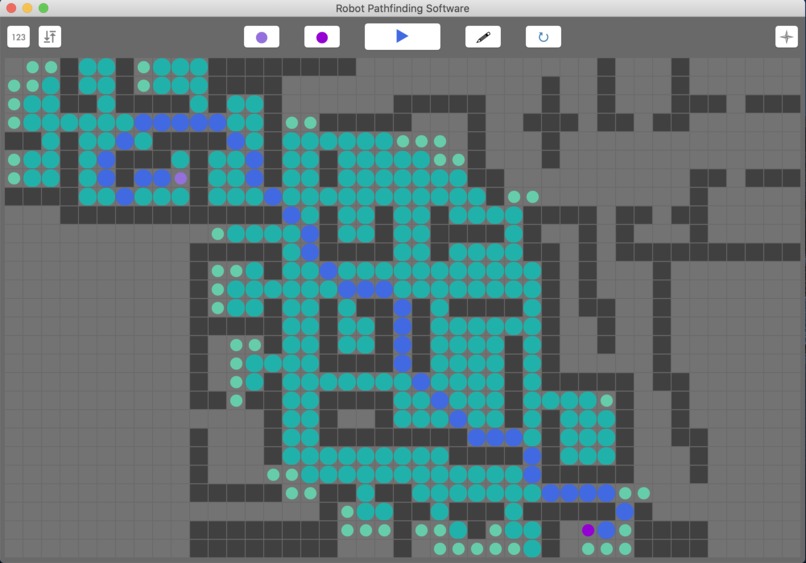
Shortest Path Found
-
No Path Found Email Notification





Inspiration
As technology becomes more pervasive, companies are starting to shift their focus and incorporating it into their business models. With each advancement, costs are cut and solutions become more efficient. We all know the dreadful wait in the doctors office, patiently waiting for the nurse to come give us our medication. A 10 minute procedure ends up eating an hour of our day. This is where the Robot Pathfinding Software comes in.
What it does
The Robot Pathfinding Software is a user friendly platform that gives the robot nurse the optimal path to the patient. The administrator simply draws out the layout of the hospital once, and the Robot Pathfinding Software will remember it. Modification to the map can be made at anytime. When a start and end point are selected, the algorithm analyzes all possible paths from the two points. On the administrator side, the application shows each route and where it originated from, as well as the cost of each node to maximize efficiency. If no path is possible from the two points, then an error message is given to the administrator via email notification. After the shortest possible path is calculated, the robot proceeds to the patient's room.
How we built it
There are many ways to calculate the shortest possible path from two points, but the most efficient of them all is the A* pathfinding algorithm. This artificial intelligence algorithm makes real-time decisions to find the shortest path from one point to another. The algorithm works iteratively as it selects what the best route is so far and then attempts to see what the next best step is. We coded it using Java and utilized Swing to create graphs for possible layouts. With the Java executable, the user can "draw" the layout of their hospital and analyze the different paths from the two locations.
Challenges we ran into
We ran into many challenges in trying to get the Robot Pathfinding Software to work according to plan. Firstly, it was a struggle using the Swing GUI for the application as the team had to conduct much research on its technicalities. Coding the algorithm itself was a challenge as we had to familiarize ourselves with the different data structures associated with it.
Accomplishments that we're proud of
Through the extensive research the team conducted, there a few features that we are particularly proud of. When the software receives the starting and ending points, it performs a "scan" of the entire map. As seen in the images above, the scan progresses through the graph in a light blue color and then goes back to highlight the most optimal path in a darker shade.
What we learned
With no previous in artificial intelligence, we learned how machine learning and complex algorithms really work. Prior to the HackAI, we had only dabbled in regression and model building, but with this opportunity, we were able to learn about about reinforced decision making and searching. Additionally, we learned how different data structures worked together to produce the artificially intelligent algorithm.
What's next for Robot Pathfinding Software
Though intended for hospitals, the Robot Pathfinding Software can be catered to any particular business where robots or directions are needed. The software has application in numerous industries. Not only can it be used here with UTD's robots, but could also be used, for example, in public settings where robots can pick up trash and dispose them in the nearest trash bin. In the future, we intend to add features such a list of locations, as well as including connecting destinations, where the algorithm can find the shortest path for 2 or more places.








Log in or sign up for Devpost to join the conversation.