-
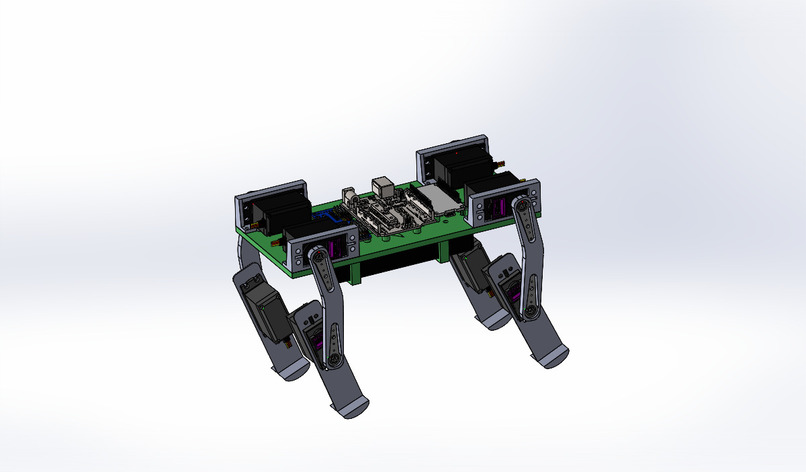
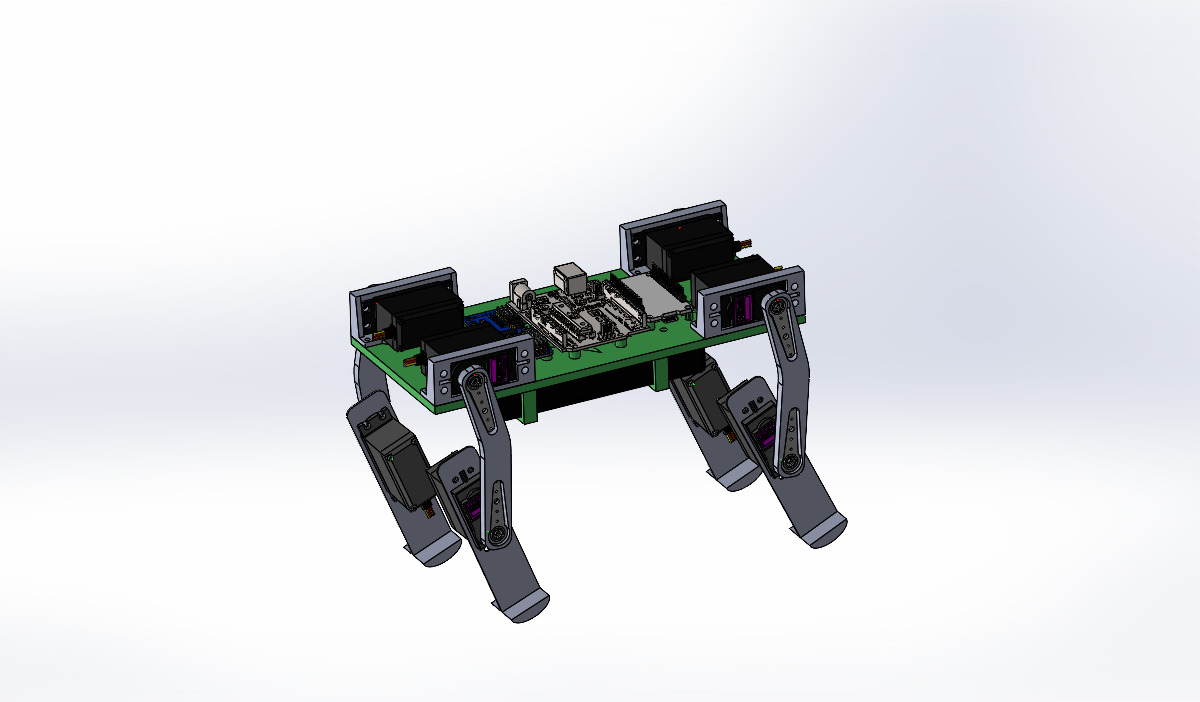
CAD Model
-

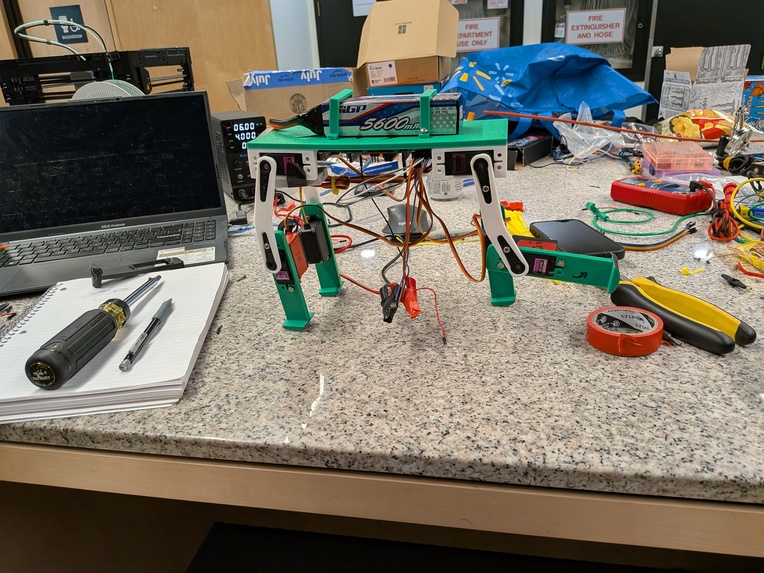
Body 3D Print
-

-
-

Inspiration
Our robot is inspired by the famous Boston Dynamics robot, Spot. As Mechatronic Systems Engineering students, we have always aspired to apply our theoretical and lab skills from school to a fun, multi-discipline project. Making our own version of the famous quadruped, is an opportunity to apply our team's mechanical design, prototyping, and software skills to the test. Over the course of StormHacks, we have built Robo Dawg.
What it does
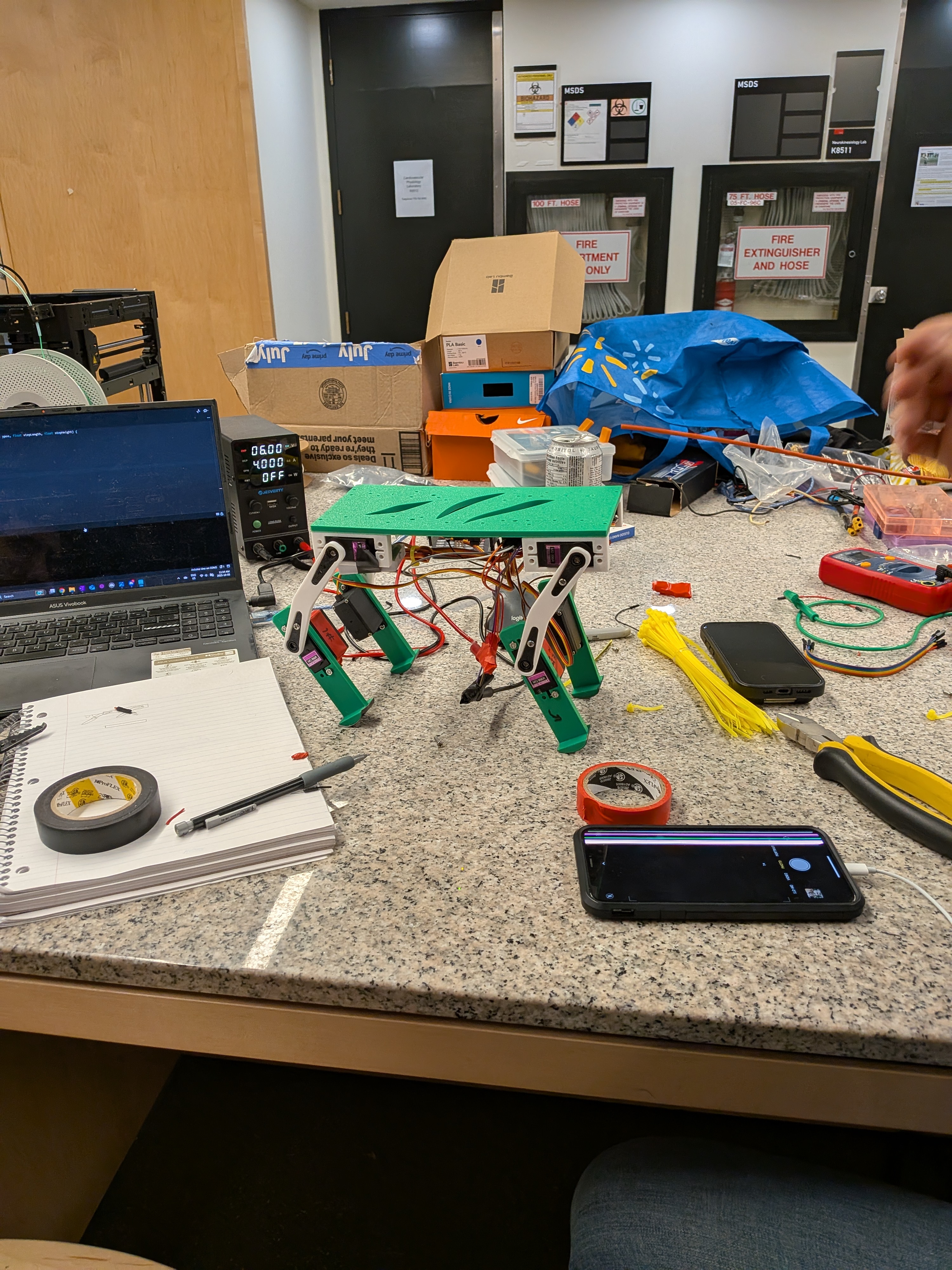
Robo Dawg is able to hinge and it's "hips" and "knees", performing vertical height adjustments using a C++ script.
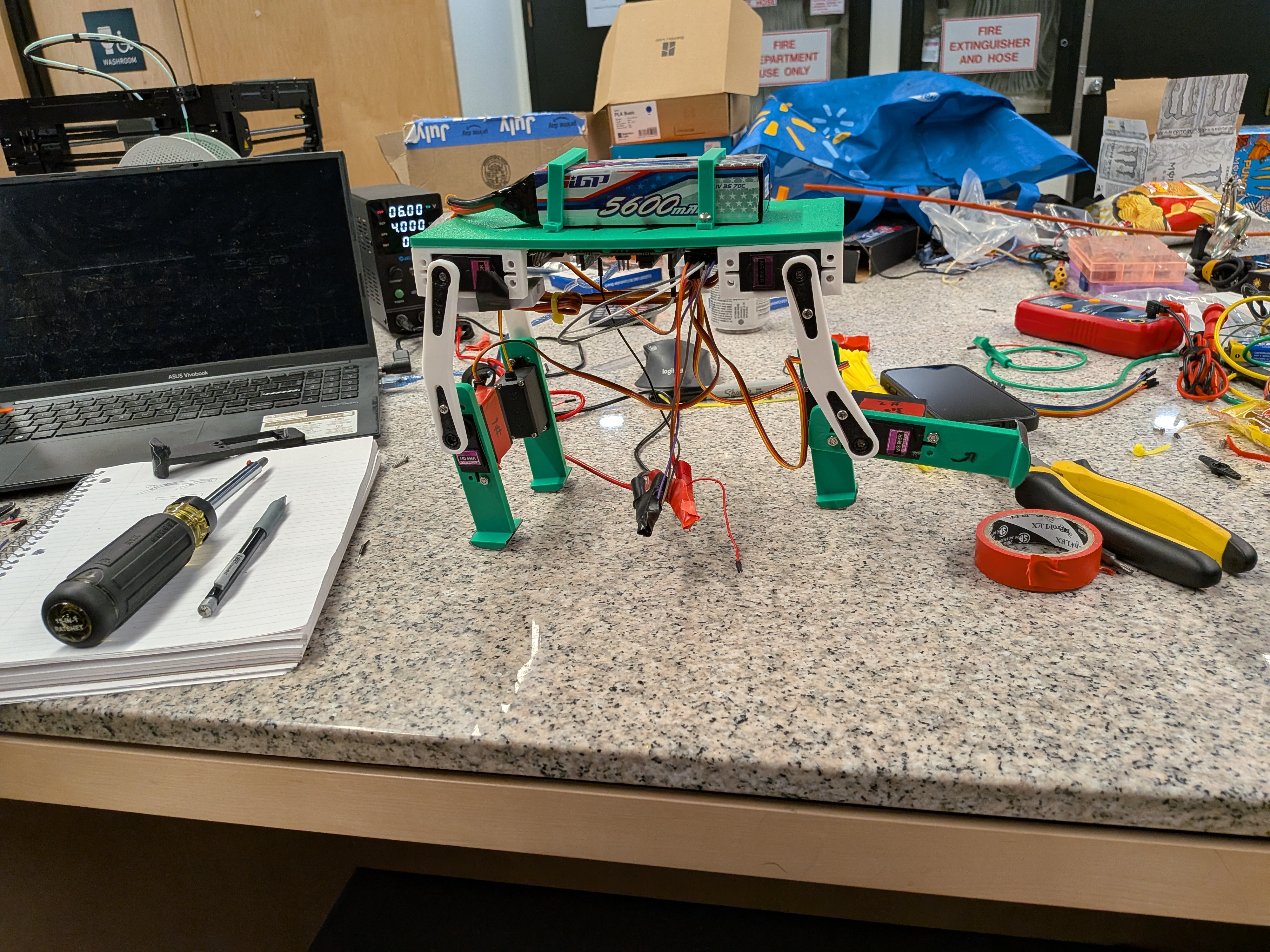
How we built it
We first started by 3D modeling every piece in SolidWorks. From the legs, to the motor housings, to the chassis, all parts were modeled and assembled digitally. This allowed us to save time and work out many flaws before trying to make the robot function in the real world. Once the digital model was drafted, we 3D printed test parts to see how tight we can make the tolerance between pieces. After prototyping the initial pieces, our team began manufacturing all the plastic pieces, made from polylactic acid (PLA), then adding all the electronics to the body of Robo Dawg and his legs. Programming was done throughout the event by making draft pieces that represent the legs.
Challenges we ran into
Logic errors in code and keeping the robot light enough for the servo motors were issues we needed to tackle during the production of Robo Dawg. We also had to keep in mind how heavy the whole assembly would be. Our robot uses 8 MG996R servo motors to carry its weight. To make sure the robot could stand and walk on it's own, we designed the 3D printed parts to be as light and hollow as possible, while making sure the pieces would not buckle under pressure.
Accomplishments that we're proud of
- Improved our CAD skills drastically, by spending a cumulative 15+ hours designing, iterating, testing
- Exercised our programming knowledge, reviewed what we learned in the past, added new techniques
What we learned
- Common 3D printing tolerances
- Servo motor calibration
What's next for Robo Dawg
More on-the-fly user input such as controller input and inverse kinematics.


Log in or sign up for Devpost to join the conversation.