-
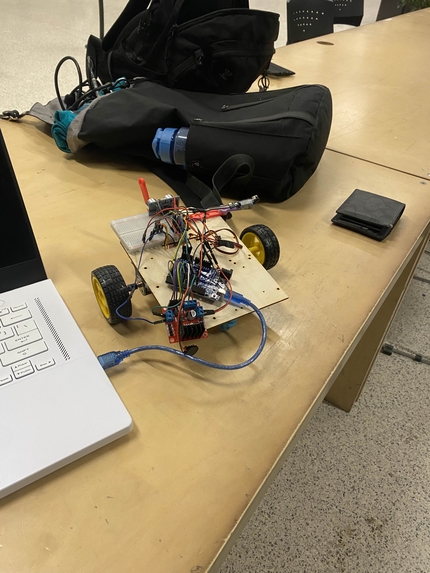
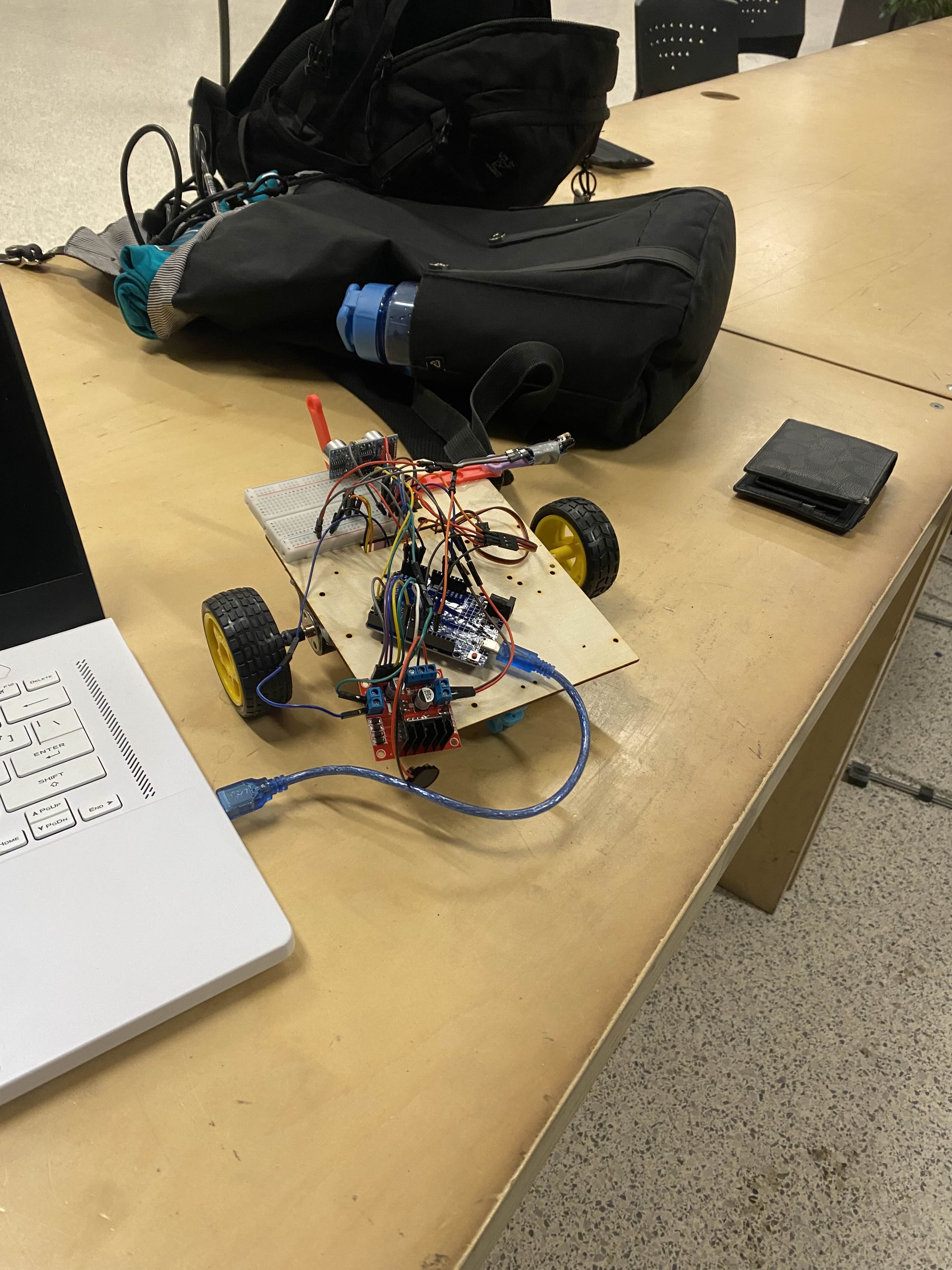
Picture of our robot
Inspiration
We were going off vibes and insisted to brainstorm and try to put together all our ideas with the goal of completing as many objectives as possible
What it does
The robot detects obstacles with IR and ultrasonic sensors to do obstacle avoidance. It detects different color lines using color sensor and follow them to complete different tasks. It also has an extending arm for picking up boxes and sweeping balls
How we built it
We forget about the components intended purposes and do what we wanted with them. For example, we cut off a lot of the 3D parts and made them into supports, and we used a 9V battery for a spacer.
Challenges we ran into
We realized that the actual game was set up differently from how we imagined.
Accomplishments that we're proud of
We put together the robot with a great centre of balance and interesting design choices while still aiming to fulfill its original functions
What we learned
We learned to think outside the box
What's next for Robot Closed Challenge - Otto Falkenstein
Try to test out everything make sure they work correctly

Log in or sign up for Devpost to join the conversation.