
Inspiration
This year, Sohil Desai, Avery Melster, Kegan Reynolds, and myself were drawn to participate in the 2024 Hacklahoma competition to learn something new about Arduino electronics. Since we primarily engage with student competition teams such as Design, Build, Fly and the Sooner Racing Team. Combining our love of modeling, physics, and an interest in becoming more proficient with embedded systems/robotics. With the retro theme this year, we felt it very suiting to utilize a tool that we could engage with using a arcade style interface (joystick).
What it does
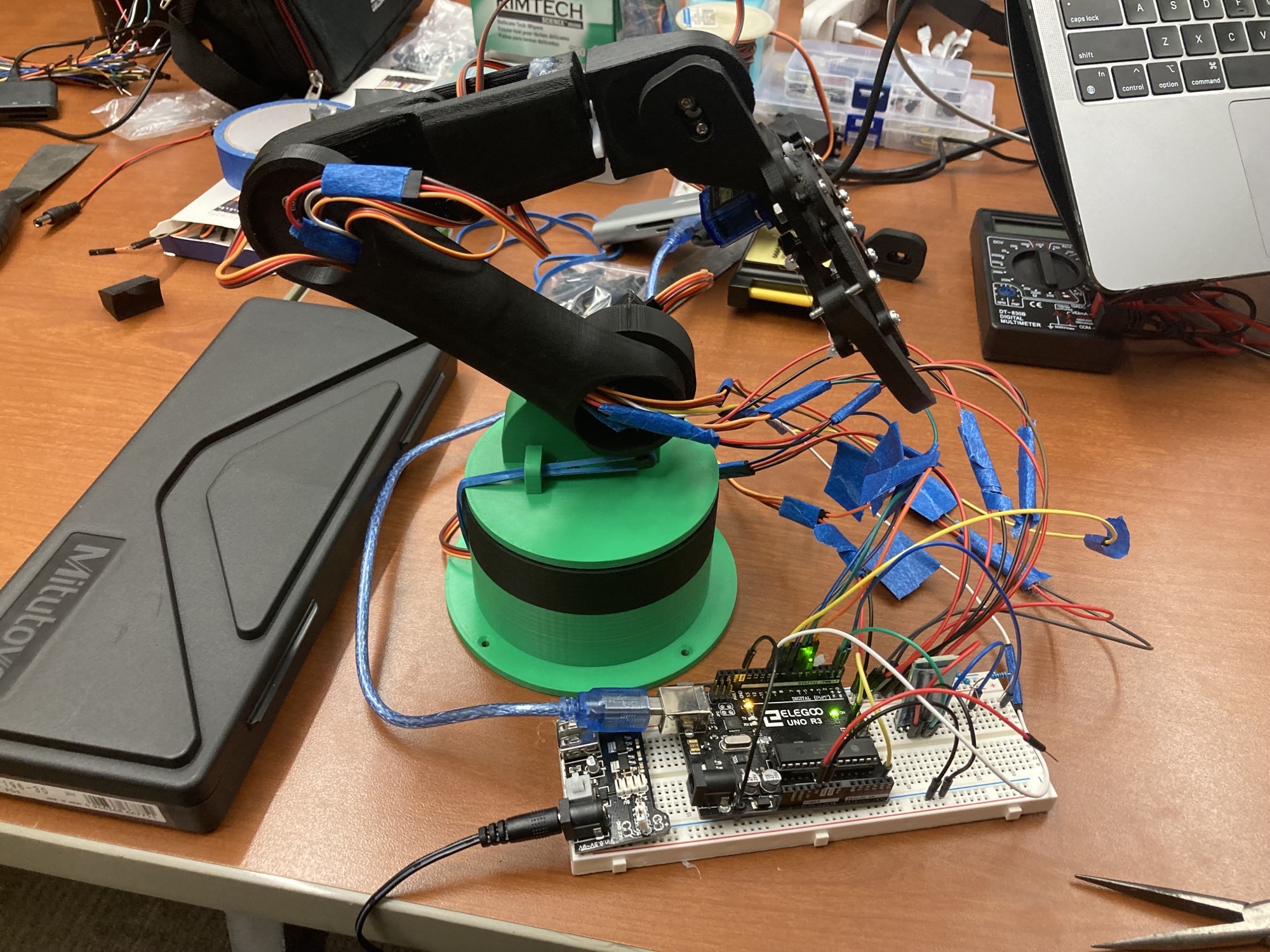
Using a series of servos, robot arm operates with 3 degrees of freedom with a joystick and button interface. It provides an arcade like experience that allows the user to blast baddies up to 15 feet away.
How we built it
Using Arduino IDE, SolidWorks, Bambu Studios, Cura Slicer, and a modified Nerf gun, mechanical linkages are connected via 3D printed components and COTS Arduino hardware. A 'dummy' arm was utilized in the initial stages of the project to begin troubleshooting electrical challenges, while another half of the team utilized CAD software and 3D slicing software to create modified and bespoke mechanical components. Sensors, hardware, and features were first tested independently before being integrated into the larger system.
Challenges we ran into
We ran into a TON of challenges: Hardware breaking Overestimating hardware capabilities Lack of experience with Arduino No ethernet in our room Limited experience with electrical concepts such as hardware requirements, breadboard circuit design, required operating current/voltage pulls Limited understanding of the range of electronic hardware Struggled to integrate mechanical design with electrical hardware Had challenges with units given provided data Blu-tooth is incredibly challenging and App design is not for beginners Time constraints 3D printing large critical components (especially when these design choices are driven by broken equipment)
Accomplishments that we're proud of
We build two robot arms that had functional circuits by the end of the night as a team of almost exclusively beginners and non-computer science students. Our team had incredible focus throughout the night and spent nearly the entirety of the night focused on our technical challenges. We worked very well in a team by maintaining strong communication and shared goals. This was possible because we regularly addressed the direction of the project together and moved forward with SMART goals illustrated on our whiteboard.
What we learned
Circuit design requires expertise and experience Breadboards are temporary circuits that can be easily destroyed when mechatronics go AWOL There are many methods of importing audio data Having a strong sense of direction makes implementing changes and generating results more straight forward Most technical challenges can be resolved with enough time (but that is often a critical constraint) .STL files are an ineffective method of data storage for engineering purposes and frankly incompatible with SolidWorks Interdisciplinary work is critical and allows for rapid progress Over-preparing cannot make up for a lack of experience
What's next for Robot Arm
We need to find a home for it. We have so much clean-up to do

Log in or sign up for Devpost to join the conversation.