-
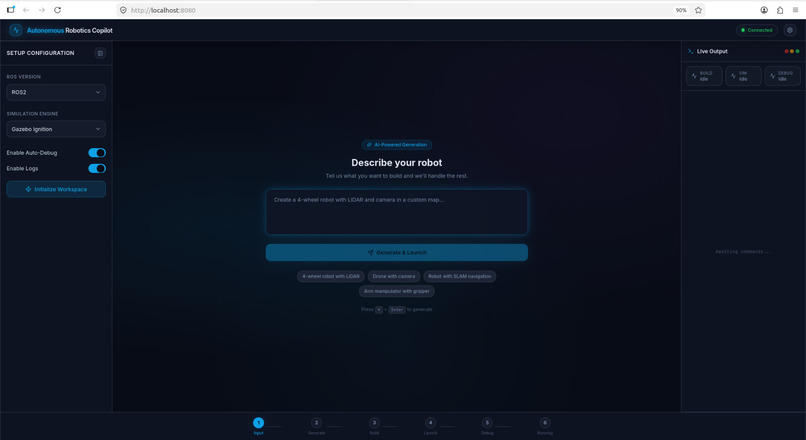
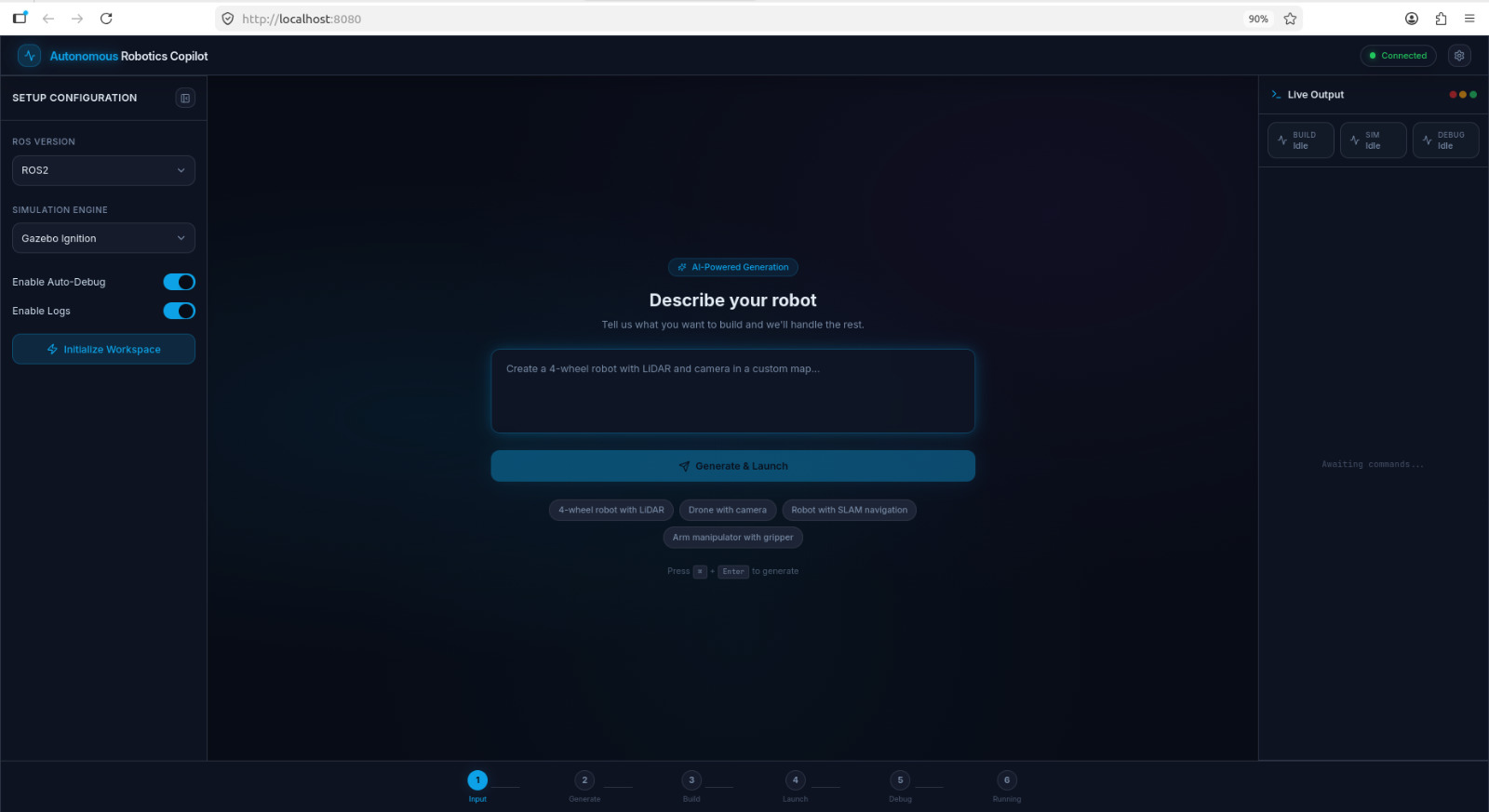
UI
-
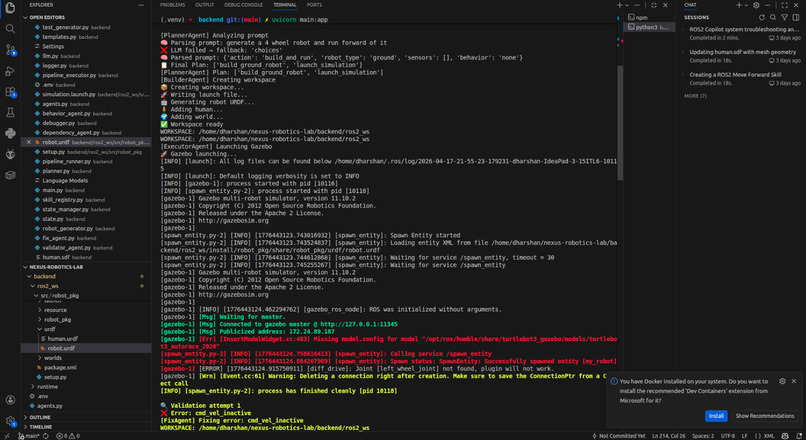
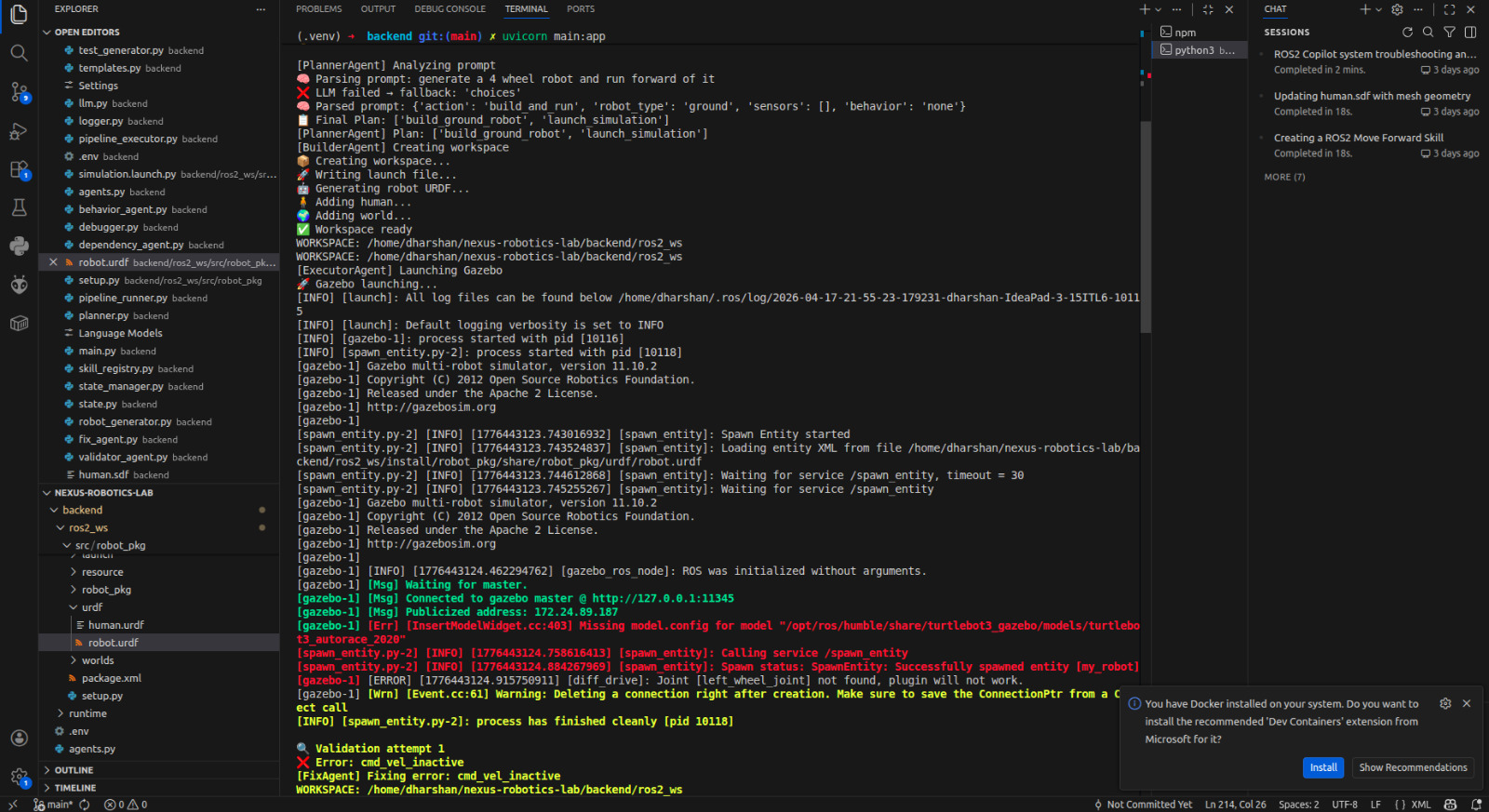
Terminal
Inspiration# 🏆 RoboPilot AI: Autonomous Robotics Copilot
## Inspiration
Robotics development is traditionally complex, time-consuming, and requires expertise in multiple domains such as ROS2, simulation, sensor integration, and AI. Even a simple robot task can take days or weeks to implement and debug.
We were inspired to simplify this process by asking:
"What if we could build and run a robot just by describing it in plain English?"
This led to the idea of creating an AI-powered copilot that automates the entire robotics pipeline — from concept to execution.
## What it does
RoboPilot AI converts natural language instructions into fully functional robotic systems in ROS2 and Gazebo.
Users can simply describe:
- Robot type (e.g., 4-wheel robot)
- Sensors (LiDAR, camera)
- Tasks (navigation, perception)
- Environment (human presence, objects)
The system automatically:
- Generates robot models (URDF)
- Configures sensors
- Builds ROS2 packages
- Integrates AI models like YOLO
- Launches simulation in Gazebo
- Executes robot behavior
👉 From prompt → robot → perception → action → simulation, fully automated.
## How we built it
We designed a multi-agent architecture to modularize the system:
🧠 Planner Agent
- Converts natural language into structured JSON plans
- Extracts robot configuration, sensors, and tasks
🌐 Dependency Agent
- Detects required tools (e.g., YOLO)
- Automatically fetches and prepares external modules
🧩 Builder Agent
- Generates URDF robot models
- Creates ROS2 package structure
- Configures sensors and launch files
⚙️ Executor Agent
- Builds ROS2 workspace using
colcon - Launches simulation using
ros2 launch
🔥 Debug System (Core Innovation)
- Rule-based Debugger fixes build and environment errors
- LLM Debug Agent resolves URDF, launch, and logic issues
🤖 Behavior Agent
- Spawns objects (e.g., humans)
- Simulates perception pipeline
- Publishes velocity commands (
/cmd_vel) - Controls robot movement
## Challenges we ran into
- ⚠️ Integrating multiple complex systems (ROS2, Gazebo, AI models)
- ⚠️ Handling build failures and dependency issues dynamically
- ⚠️ Ensuring stable URDF and launch file generation
- ⚠️ Simulating perception realistically within Gazebo
- ⚠️ Designing a reliable self-healing debug pipeline
## Accomplishments that we're proud of
- ✅ Successfully built an end-to-end automated robotics pipeline
- ✅ Implemented a multi-agent AI architecture
- ✅ Developed a self-healing debugging system
- ✅ Achieved real simulation execution in Gazebo
- ✅ Reduced robotics setup time from weeks → minutes
## What we learned
- Deep understanding of ROS2 architecture and workflows
- Practical challenges in simulation and robotics integration
- Importance of modular system design (agent-based architecture)
- Handling real-world debugging scenarios using AI
- Bridging AI with robotics and automation systems
## What's next for RoboPilot AI
- 🚀 Extend support to real-world robot hardware
- 🧠 Improve perception with real-time object detection
- 🌍 Add support for complex environments and SLAM
- 🗣️ Enable voice-based robot creation
- 📦 Build a web-based interface for wider accessibility
- 🔗 Integrate with cloud robotics platforms
🏁 One-Line Pitch
“RoboPilot AI turns natural language into fully functional robotic systems with self-healing capabilities.”

Log in or sign up for Devpost to join the conversation.