-
-
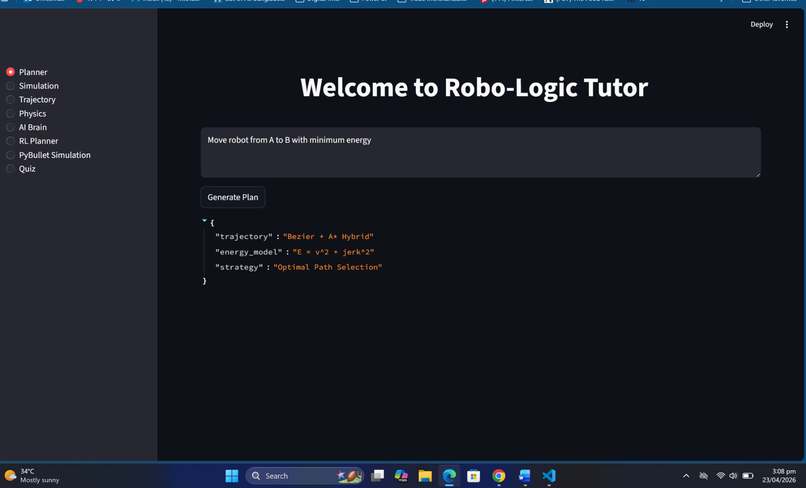
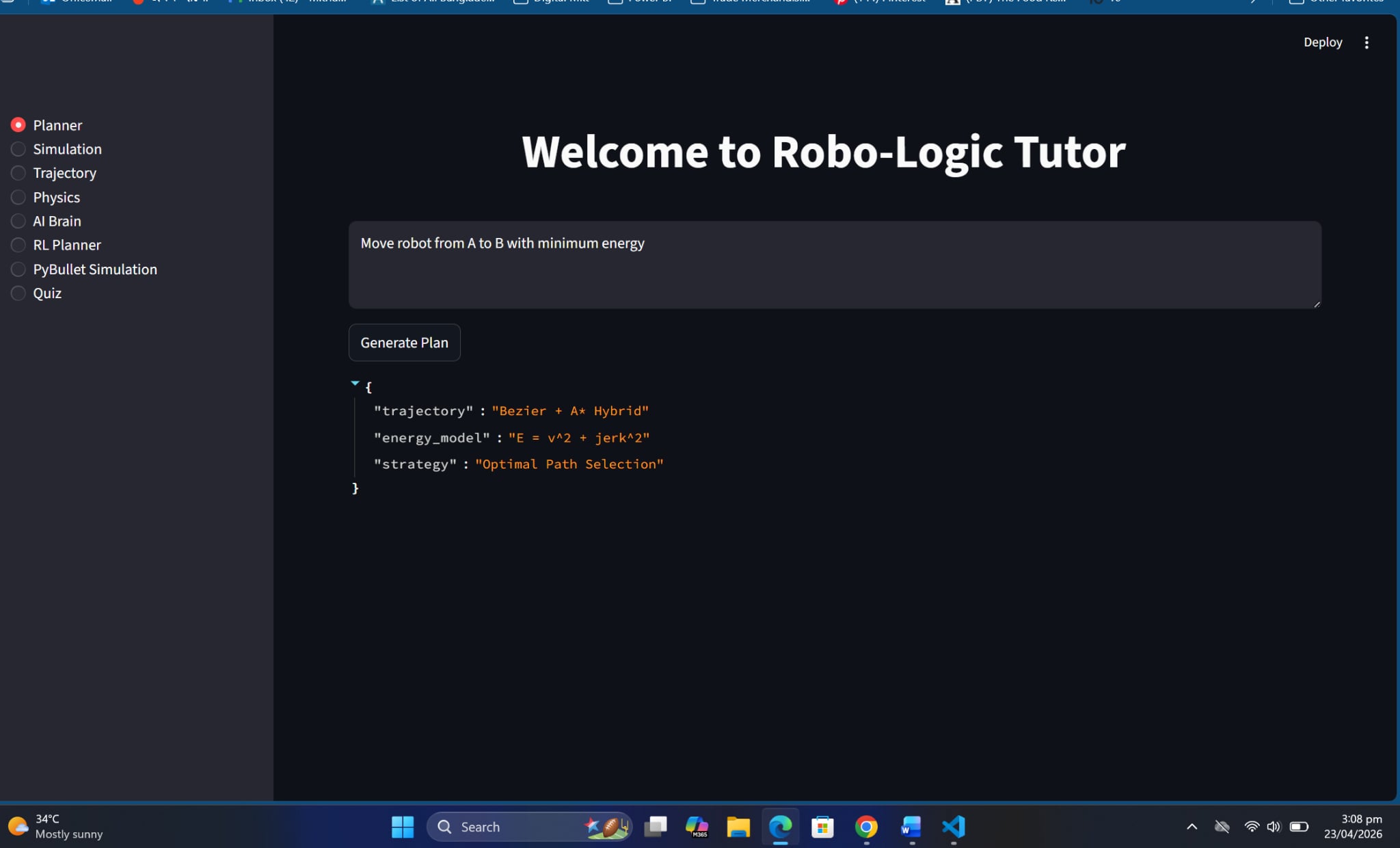
Autonomous Motion Planning: Generating optimized AI trajectories with real-time motion strategy and energy reasoning
-
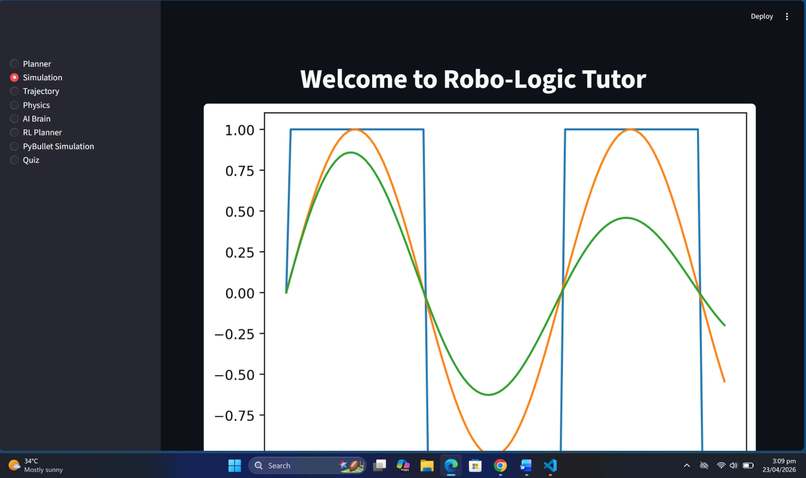
Multi-modal Simulation: Comparing 'Fast', 'Smooth', and 'Optimal' robotic movement patterns for high-precision control
-
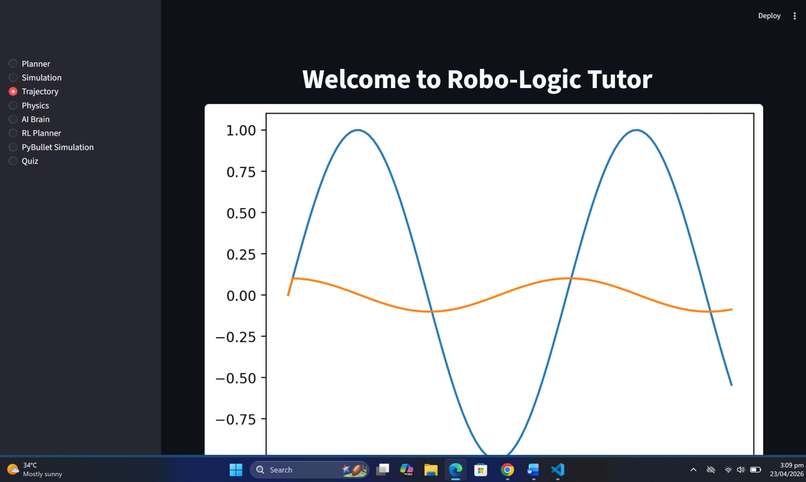
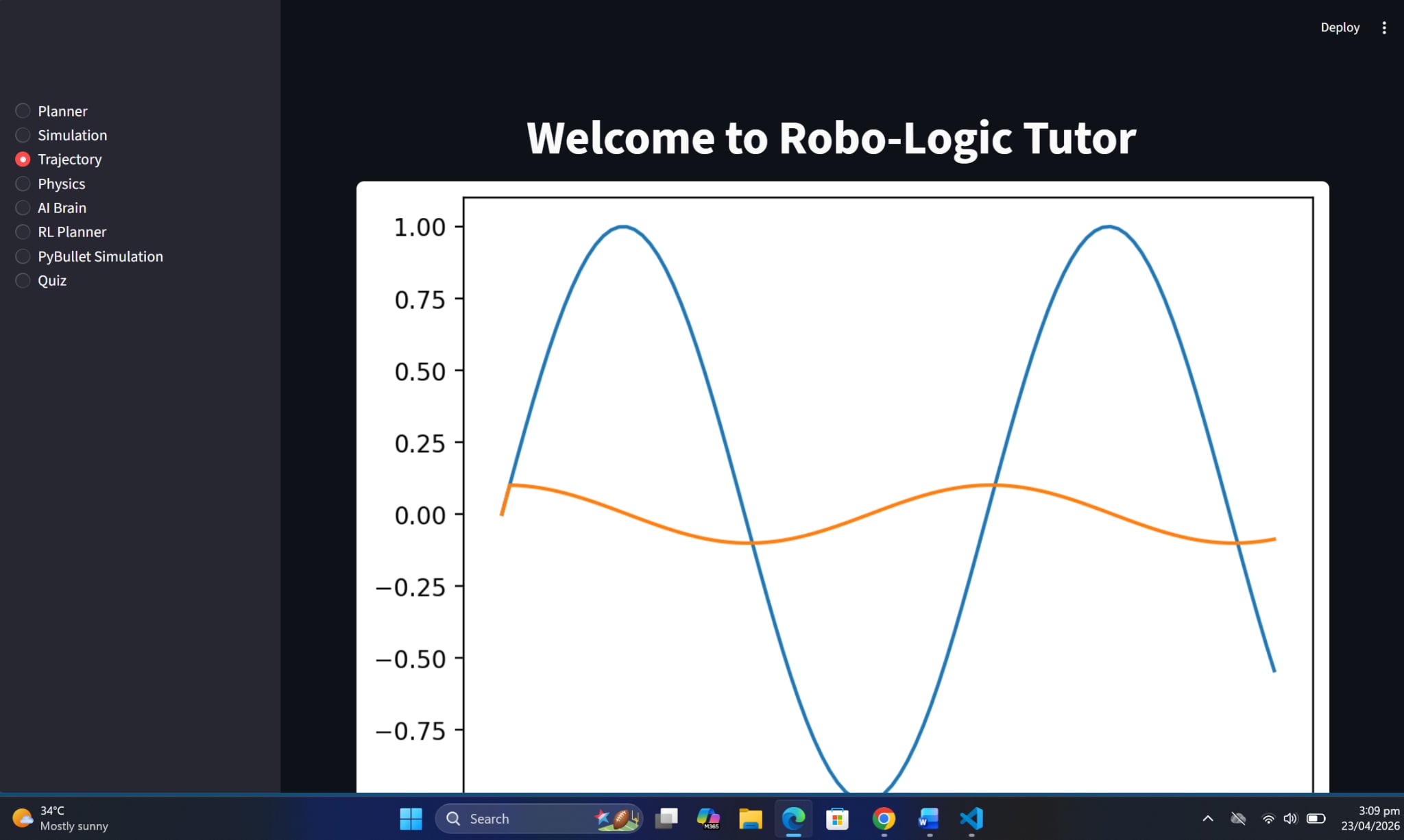
Kinematic Trajectory Tracking: Monitoring Position and Jerk levels to ensure smooth robotic arm transition.
-
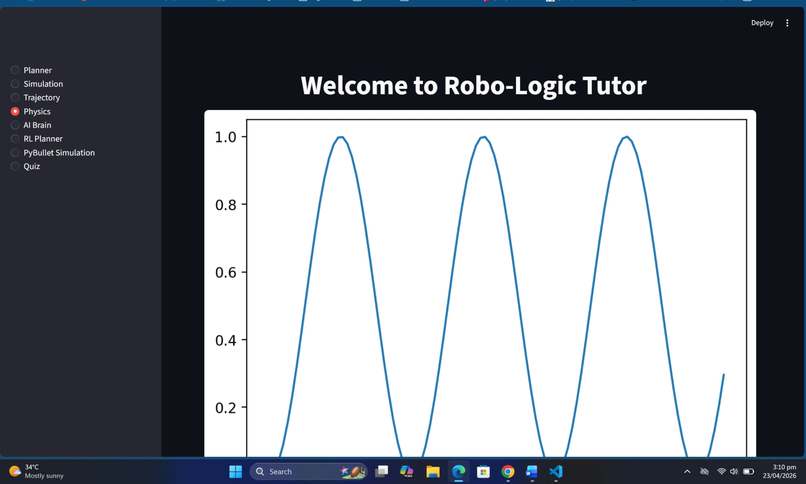
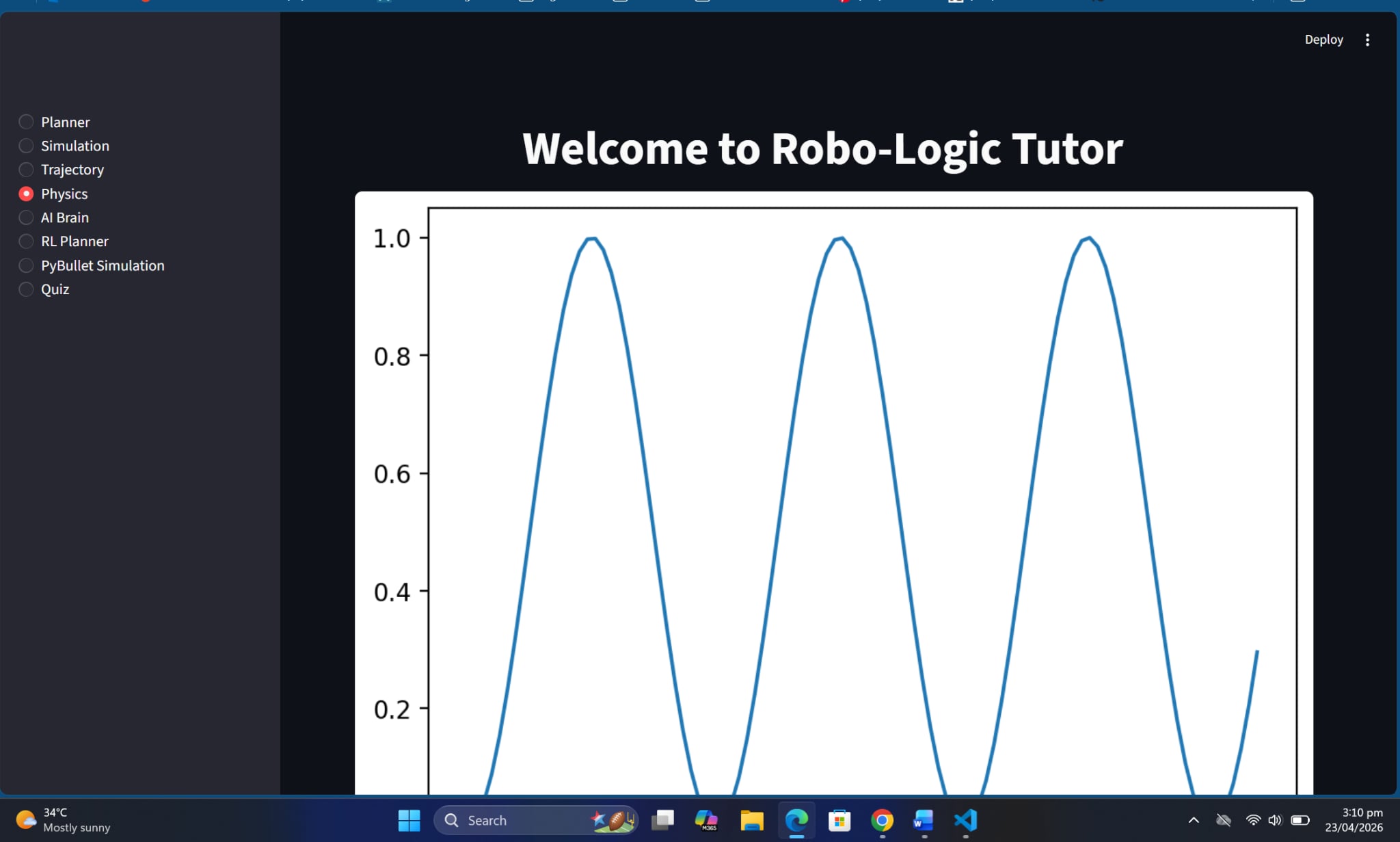
Energy Consumption Profiling: Visualizing real-time power usage to achieve eco-friendly and efficient automation.
-
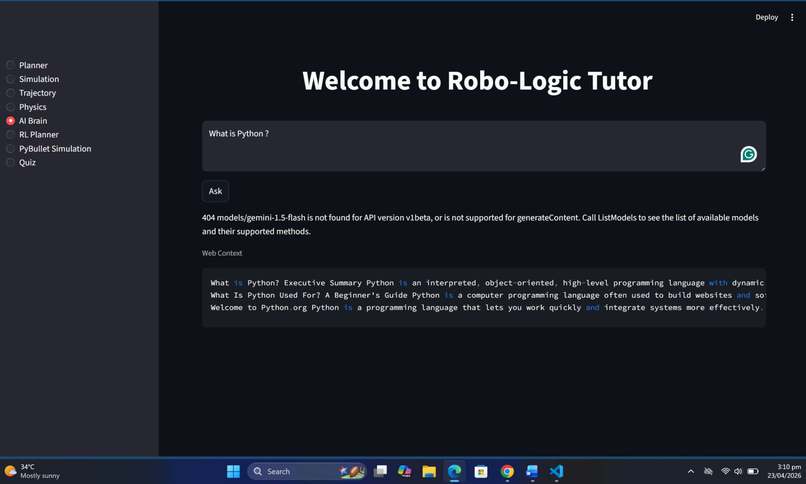
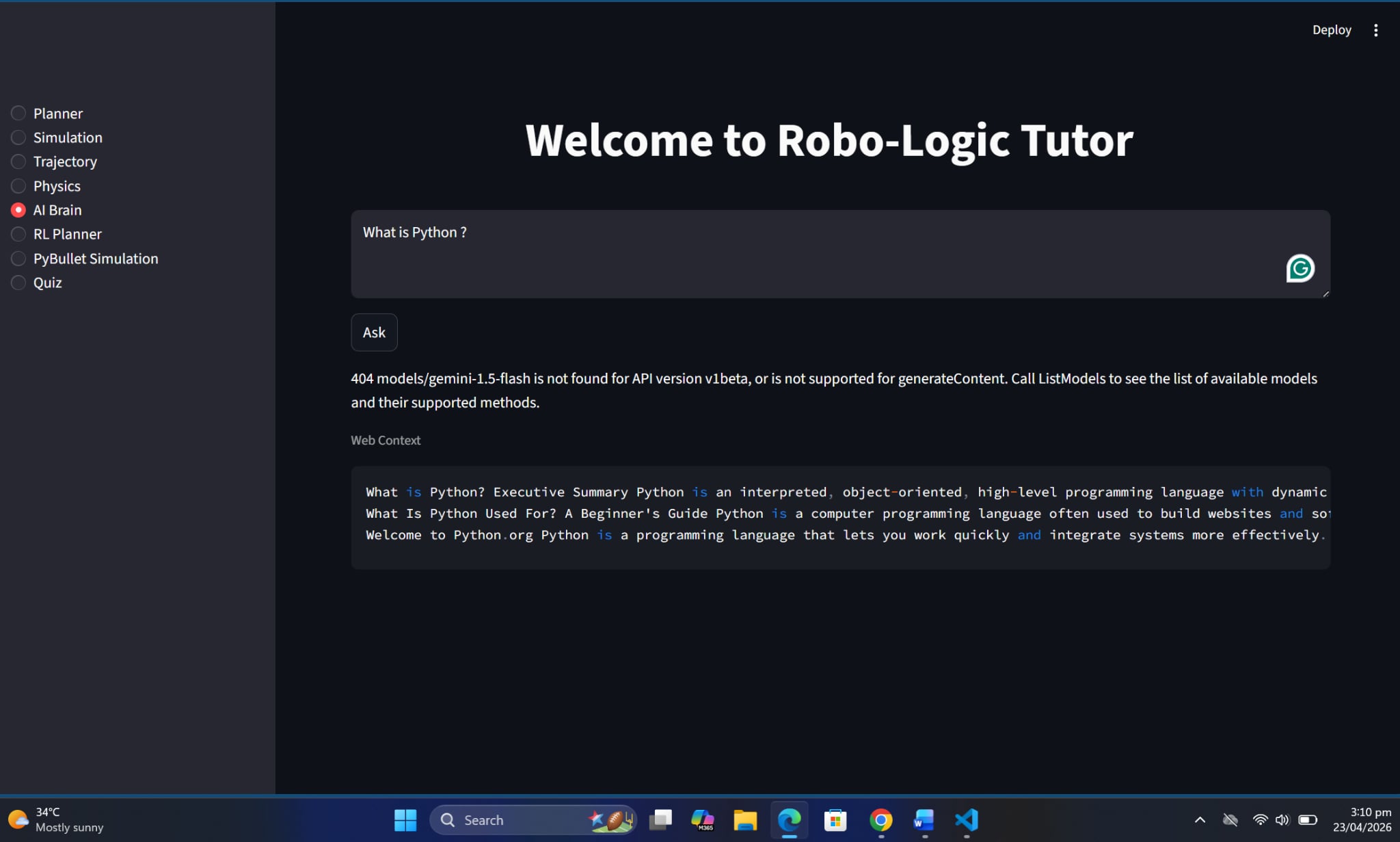
olving complex robotics queries with deep learning and web-integrated intelligence
-
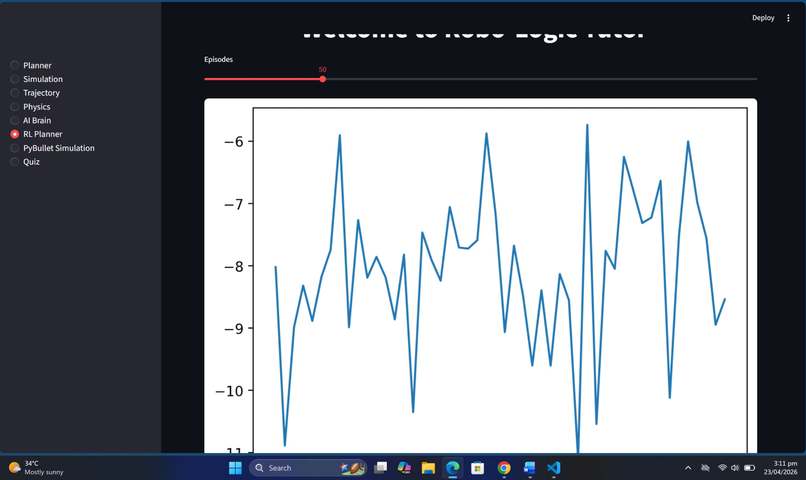
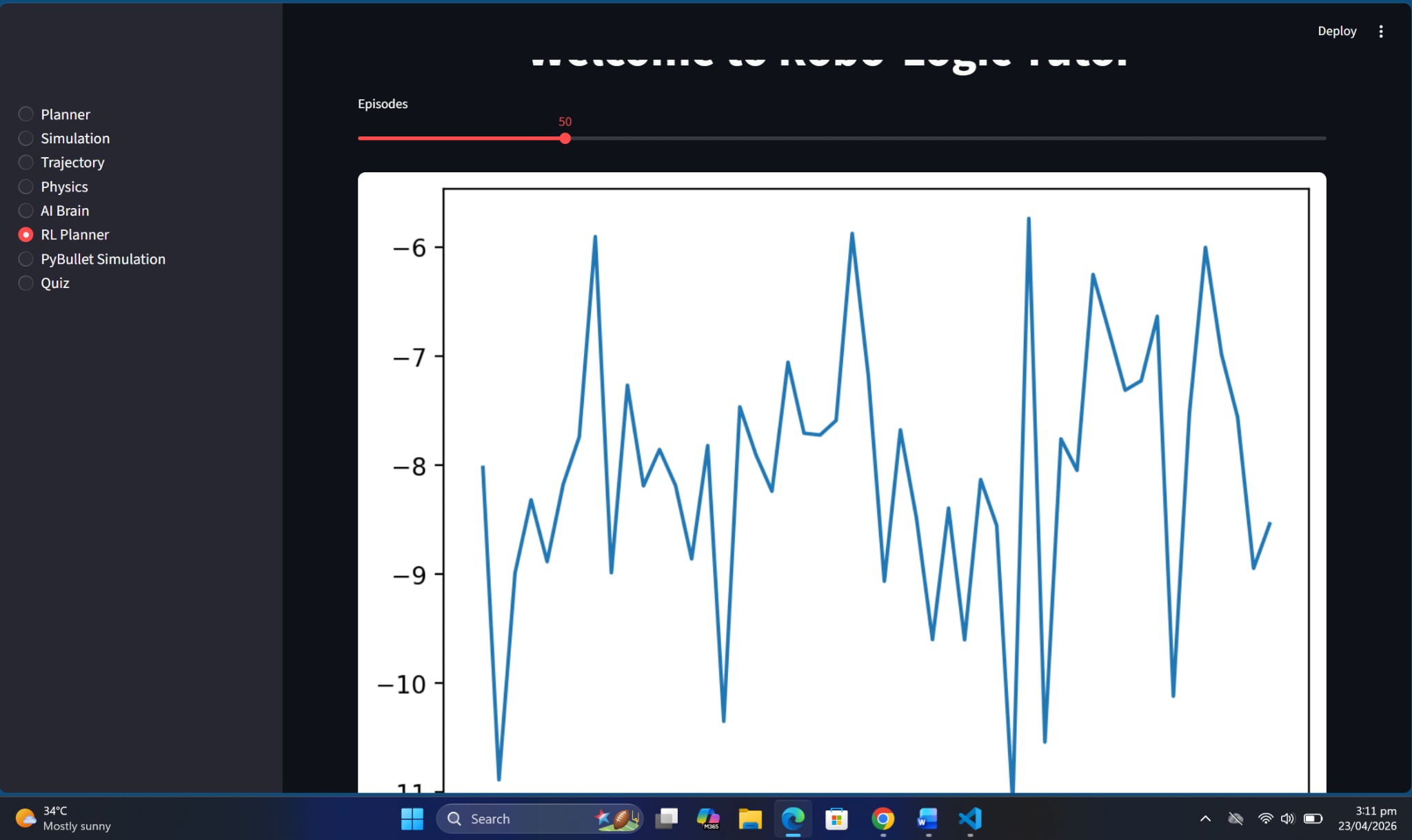
Reinforcement Learning (RL) Planner: Tracking agent training rewards to achieve the most efficient goal-oriented path.
-
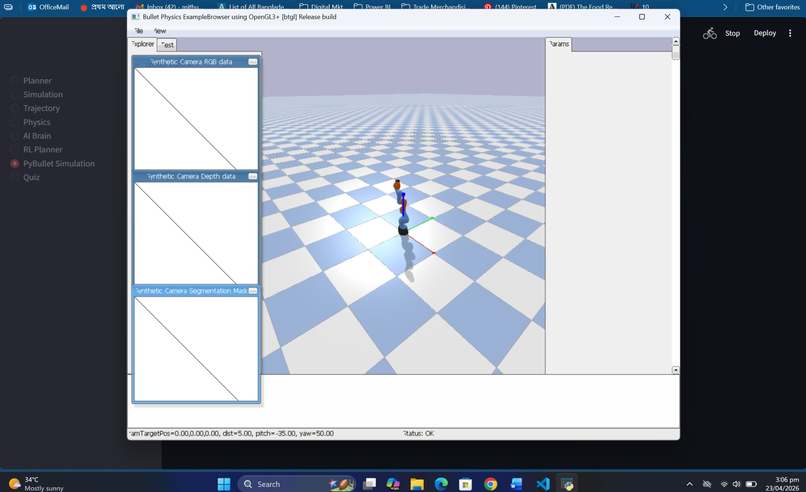
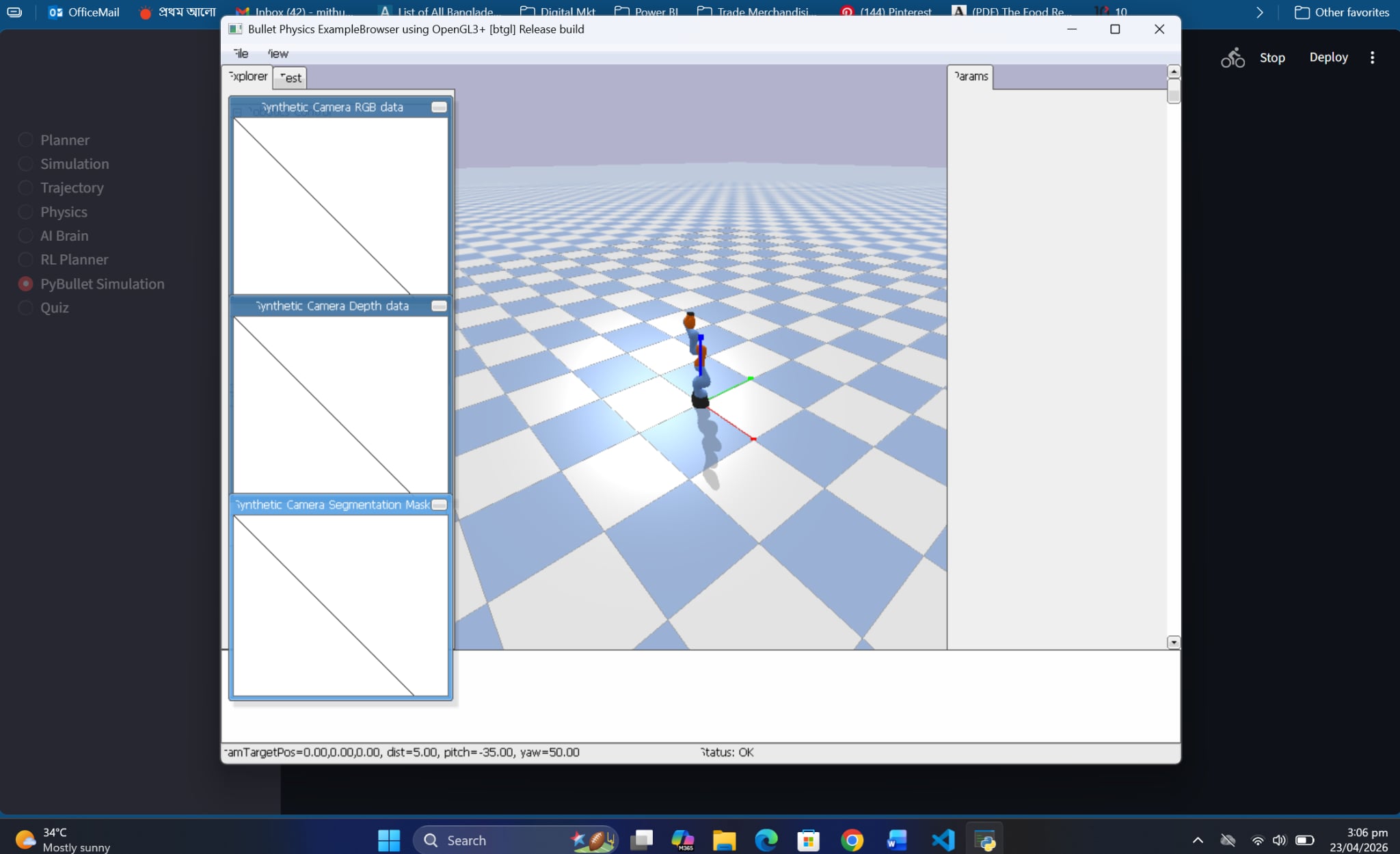
Physics-Based Simulation: Leveraging PyBullet to validate Kuka IIWA kinematics and 3D environmental interactions.
-
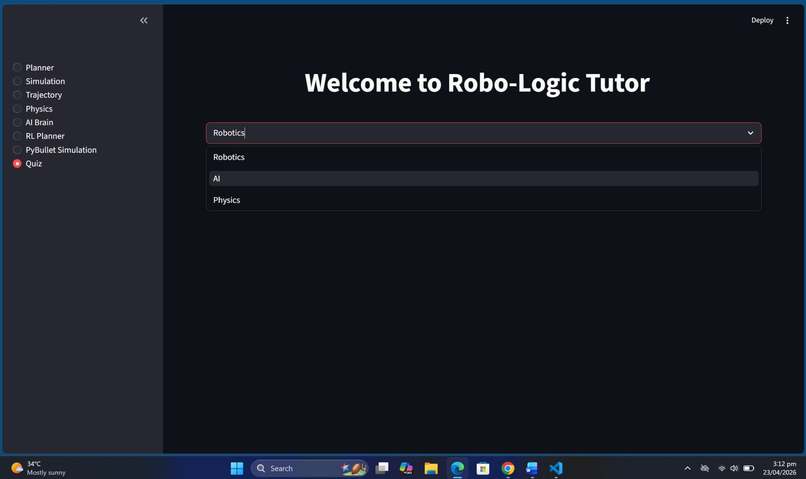
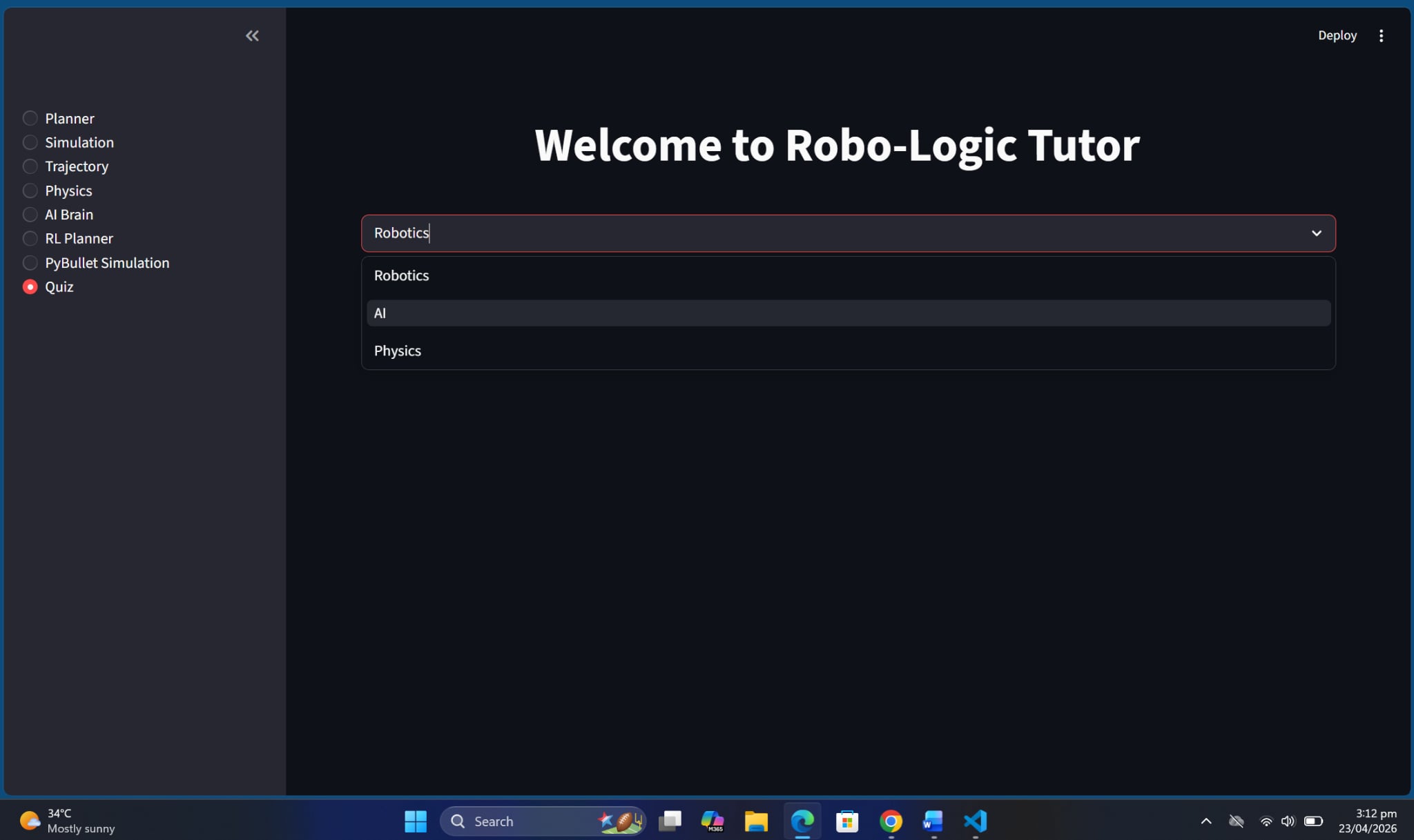
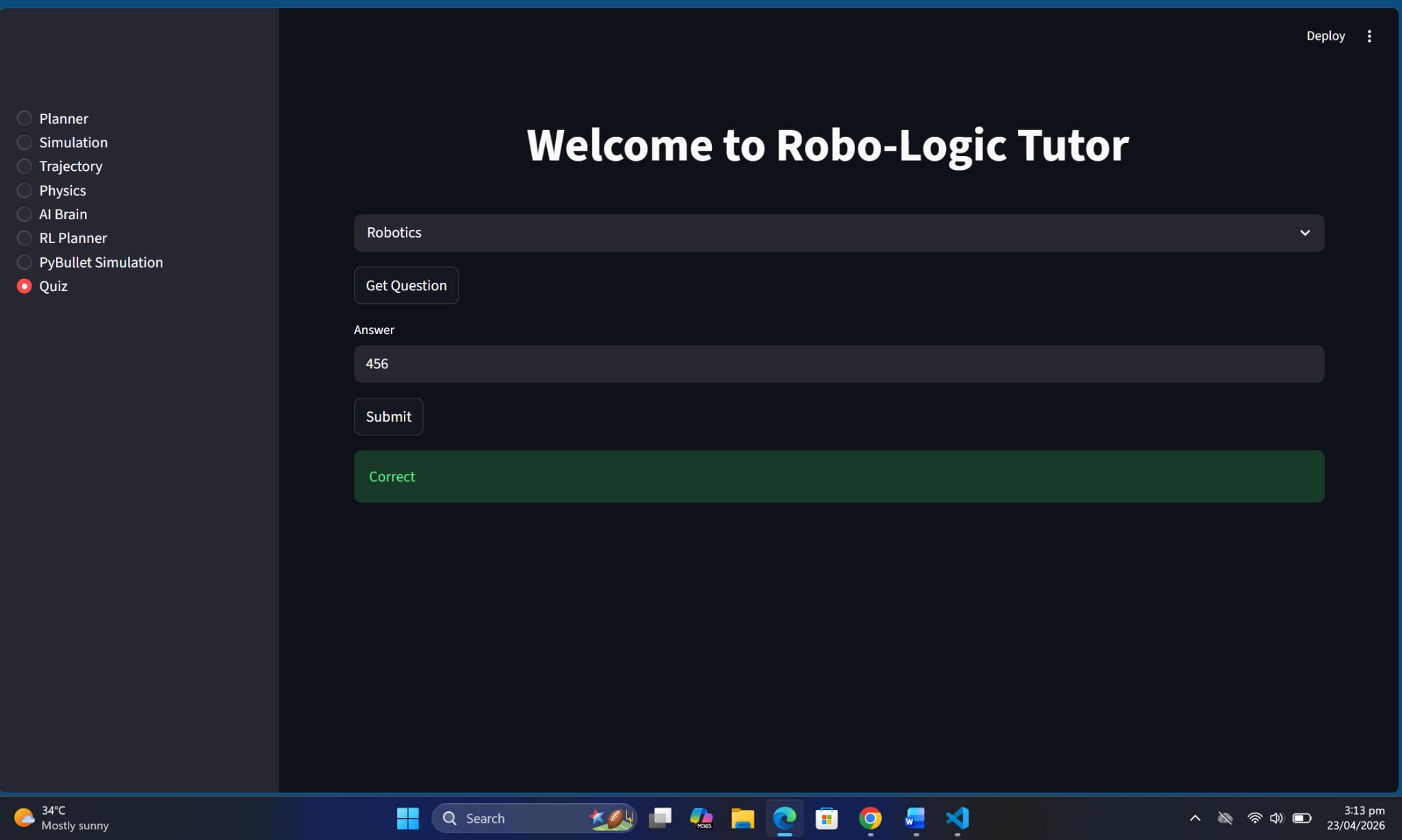
Interactive Learning Modules: Users can select between Robotics, AI, and Physics domains to access specialized assessment data and tutoring.
-
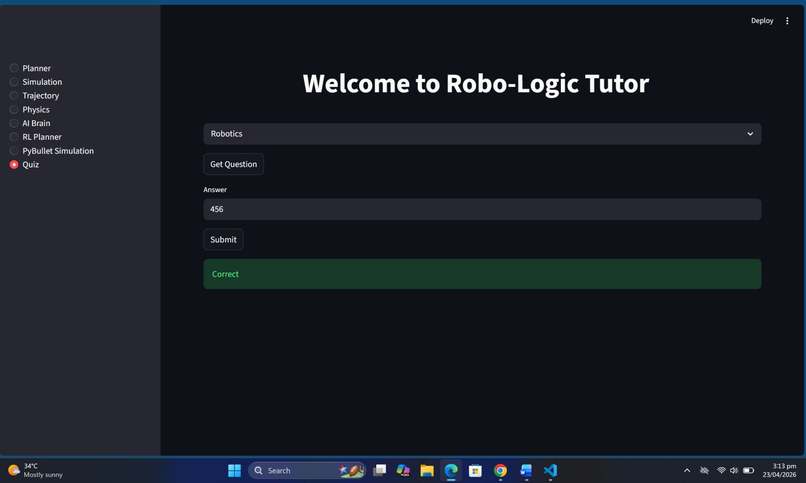
Real-Time Skill Validation: Integrated engine providing instant feedback and voice-assisted learning enhancements
-
ROBO LOGIC TUTOR: An AI-Powered Educational Ecosystem.

Inspiration
Robotics learning is often too theoretical and disconnected from real-world motion, control, and energy efficiency. We wanted to build a system that teaches robotics the way engineers actually think through planning, simulation, physics intuition, and AI reasoning. This vision led to the creation of Robo-Logic Tutor, an interactive AI system that bridges robotics theory with real-time simulation and intelligent decision-making.
What it does
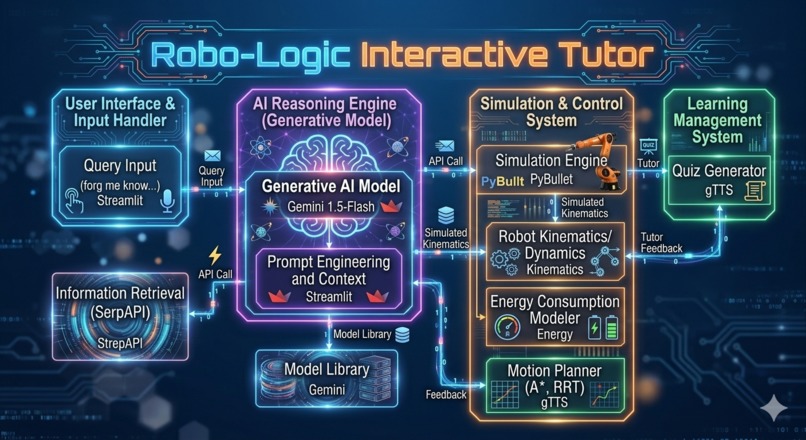
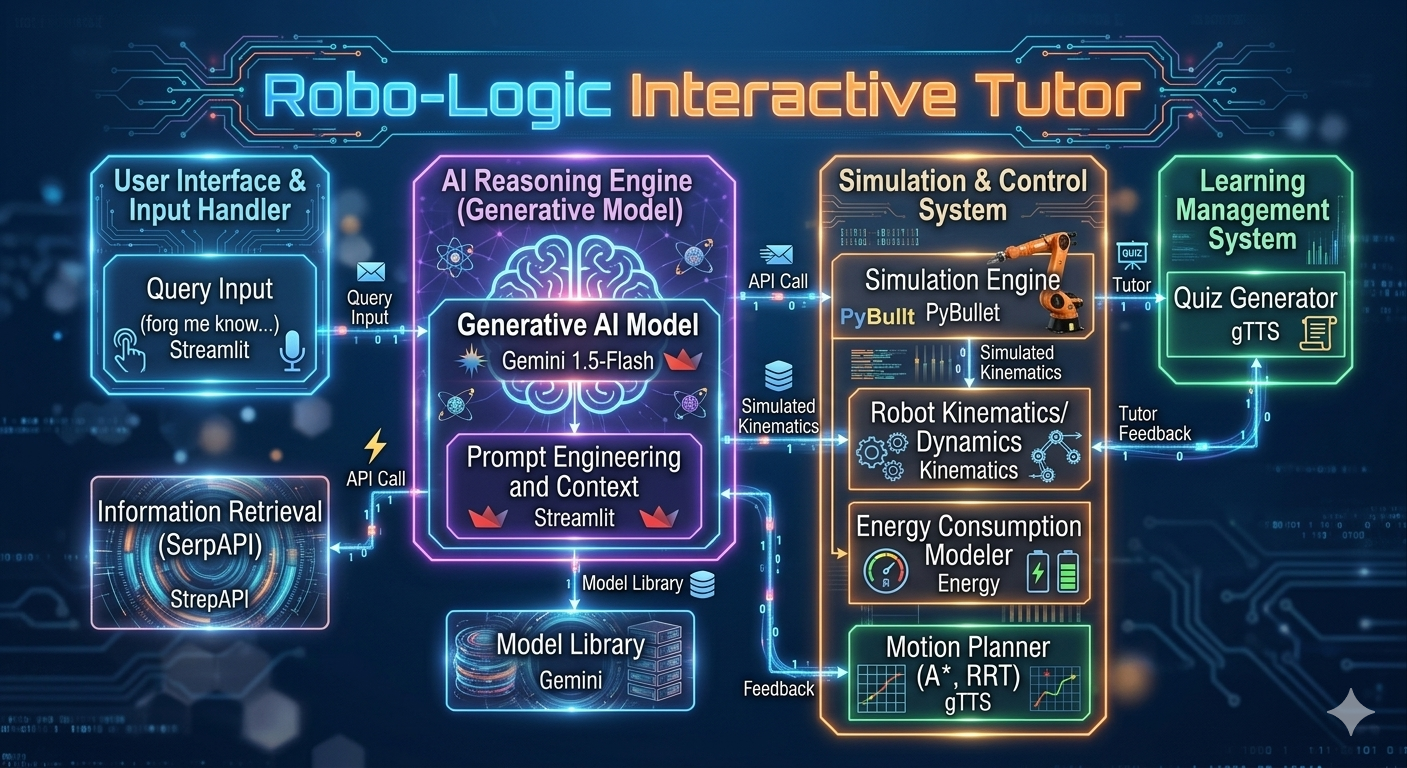
Robo-Logic Tutor is an AI-powered robotics learning and simulation platform that: Generates intelligent robot motion plans using AI Simulates trajectories, energy usage, and control behavior Demonstrates reinforcement learning concepts visually Runs robotic arm simulations using PyBullet Answers robotics, AI, and physics questions using Gemini AI + web context Provides voice-based feedback for interactive learning It combines AI reasoning, physics simulation, and visualization into one unified learning.
How we built it
We built it using a modular AI-robotics architecture: Streamlit for interactive UI Google Gemini API for AI-based robotics reasoning SerpAPI for real-world context retrieval NumPy and Matplotlib for physics and trajectory simulation PyBullet for robotic arm simulation (KUKA IIWA) gTTS for voice feedback system Custom reinforcement learning loop for decision-making simulation Each module works independently but connects through a unified learning pipeline.
Challenges we ran into
Integrating PyBullet with Streamlit without freezing or crashing Handling Gemini API model compatibility and response formatting Designing stable reinforcement learning simulation inside a web app Balancing real-time simulation performance with UI responsiveness Structuring AI outputs into meaningful robotics reasoning instead of plain text.
Accomplishments that we're proud of
Built a full AI + robotics + simulation integrated learning system Successfully combined LLM reasoning with robotics control concepts Implemented RL-based learning visualization from scratch Created real robotic arm simulation using PyBullet Developed voice-enabled interactive AI tutor Unified AI, physics, and control theory into one platform.
What we learned
How reinforcement learning connects directly to robotic control systems How large language models can assist engineering reasoning Importance of energy, torque, and smooth trajectory optimization How simulation bridges the gap between theory and real-world robotics How to design modular AI systems for complex engineering applications.
What's next for Robo-Logic Interactive Tutor
Integration of SAC/PPO-based real reinforcement learning agents Digital twin system for real-time robot behavior replication ROS2 integration for real robot hardware control Advanced energy-efficient trajectory optimization engine Multi-robot coordination and swarm simulation Cloud-based interactive robotics lab for students Adaptive AI tutor that changes difficulty based on learner progress.

Log in or sign up for Devpost to join the conversation.