-
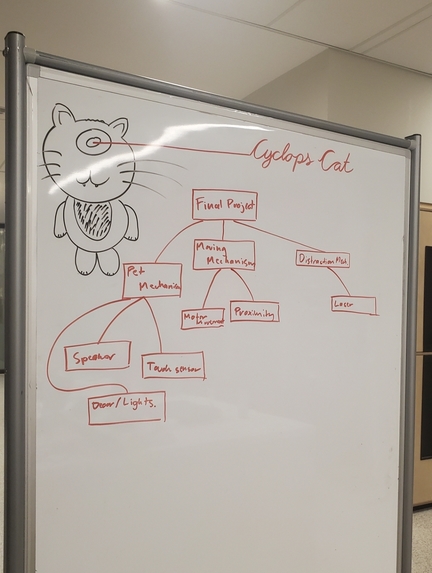
Planning
-
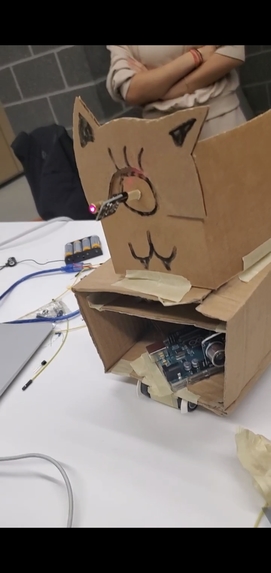
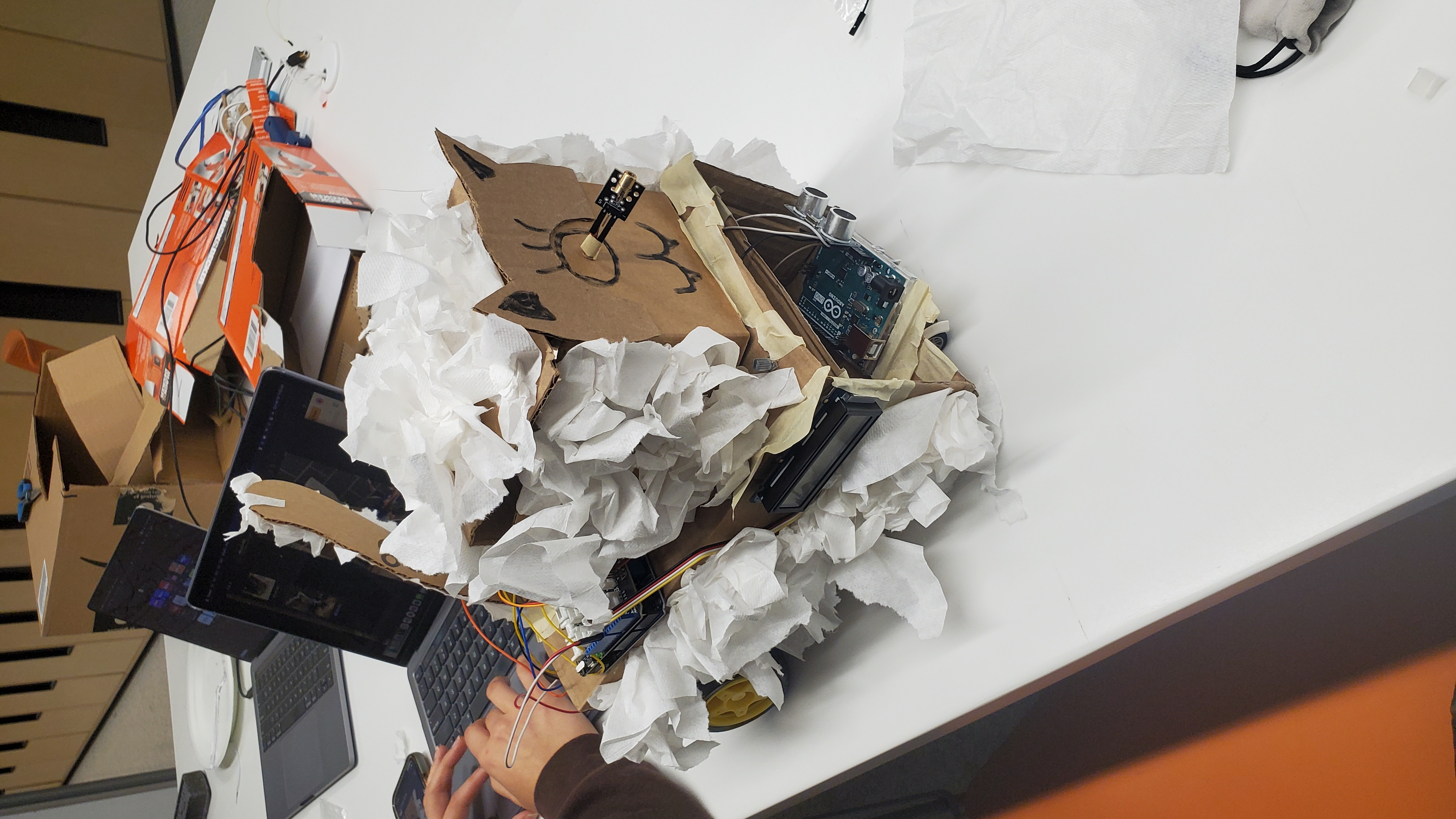
Almost Complete!
-
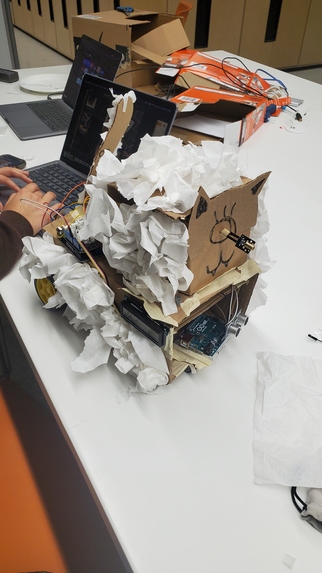
Final results!
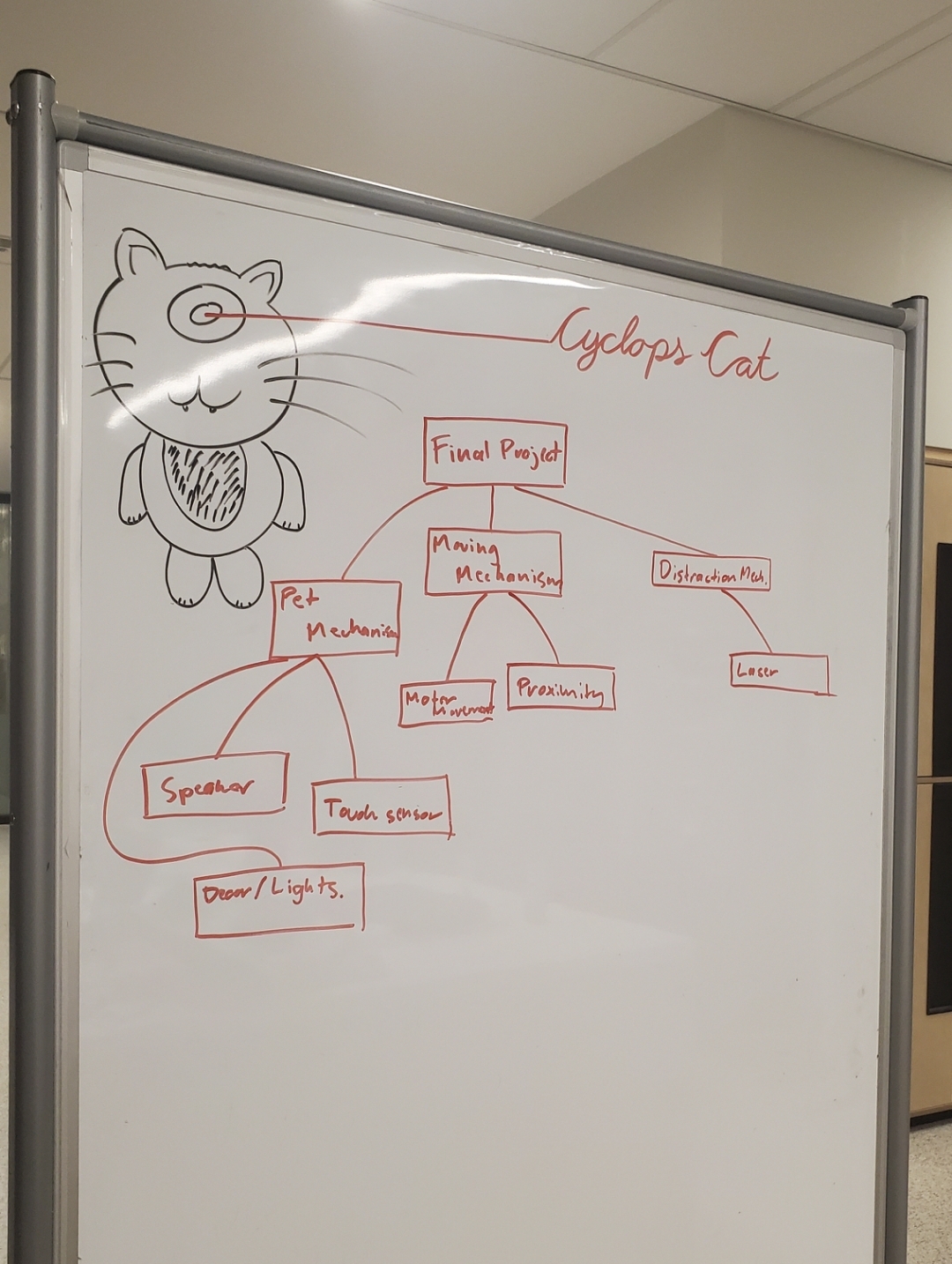

Inspiration
We thought, why entertain your pet, when you can get a robot to do it for you? We have seen offerings from many companies and have decided that they don't quite reach the mark in terms of appearances, these offerings are often very unalive, and uninspiring. We wanted to create an offering that resembled and imitated a cat!
What it does
Robo Cat acts as a friendly cat companion for any pet left home alone. It provides an engaging experience for pets at home. The Robo Cat can use a laser pointer, drive around, and most importantly meow and shake its tail. It effectively acts as a distraction for any lonely pet.
How we built it
Robo cat consists of multiple systems integrated together, including a wheeling, cat noise imitation, tail wagging, rotational laser, and monitor to create a functioning robot.
To begin with, the wheeling system utilizes 2 DC motors and a proximity sensor in order to operate. In detail, the DC motors are attached to wheels - forcing the wheels to turn when power is provided. Additionally, when the proximity sensor receives a signal providing the information that a object is nearby, one of the wheels stops, while the other continues to operate - forcing the mechanism to turn.
Secondly, a buzzer has been hardcoded at different frequencies in order to imitate the meowing of a cat, and this system continuously runs while the mechanism operates. Alongside, the cat noise, the mechanisms tail is continuously wagging with the use of a servo motor that turns between certain angles.
Thirdly, in order to create a laser that can rotate in all angles, a dual system utilizing servo motors has been connected to a laser, and both of these mechanisms turn on when a switch is clicked. In detail, the bottom servo randomly turns between 0 and 180 degrees along the x axis, while the top servo (which is connected to the bottom servo and hence horizontally rotates) turns between 0 and 180 degrees along the y axis. Moreover, a laser is connected to the top servo, hence it rotates randomly along the x-y cartesian plane due to the servo motors.
Lastly, an LCD monitor has been connected to the side of the mechanism, and it displays a welcome message, instructions and other messages that aid its imitation to act like a cat.
Challenges we ran into
During our iterative design process, we ran into multiple challenges including having difficulty in creating a meow noise, using the force sensor and getting the DC motors to seamlessly work with the proximity sensors. However, we perceived through the challenges and created a final functioning design due to our creative and critical thinking skils.
Accomplishments that we're proud of
We are very proud of many mechanisms inside of the robot. Most importantly, the meowing is done using a piezo buzzer, since using a speaker would require a proprietary driver. The driving mechanism required some more complex circuit analysis to really understand how the DC motors were driven. The laser movement mechanism was a quick fix to a lack of gearbox design time, and the tail is just adorable!
What we learned
We learned about how to utilize multiple different components that we never interacted or utilized before, including an LCD monitor, a laser, force sensor, buzzer and speaker.
Additionally, we learned about how to integrate multiple systems together in order to create a robot.
What's next for Robo Cat
Robo cat is still in very early stages of development, and it's appearance is not the best, but we would like to work towards a cohesive, unified, Robo cat. A wooden construction with 3d printed parts is next in line for the development cycle of Robo Cat, and eventually, proprietary printed circuit boards with confident connections!
Built With
- ardunio
- c++

Log in or sign up for Devpost to join the conversation.