


Inspiration
Nearly 1.3 million people die in road crashes each year, on average 3,287 deaths a day. An additional 20-50 million are injured or disabled. More than half of all road traffic deaths occur among young adults ages 15-44. Road traffic crashes rank as the 9th leading cause of death and accounts for 2.2% of all deaths globally. With a personal experience with a death of a pet due to a road accident, I wanted to build this project.
What it does
Built with cheap tech such as RPI's, different cameras and infrared sensors, this product aims to reduce the deaths and accidents happening on roads and highways due to negligence or unavoidable circumstances even before they occur.
How we built it
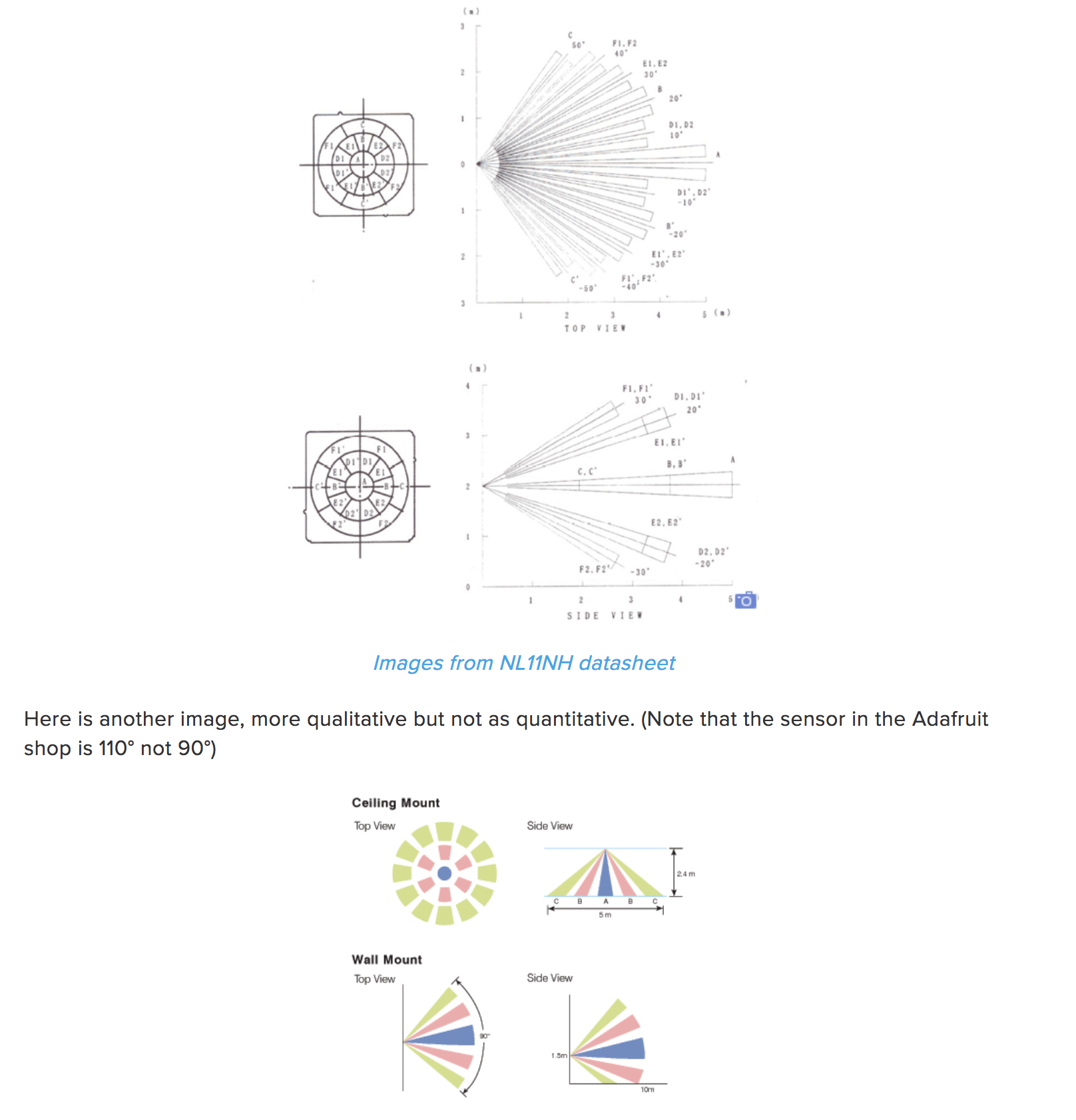
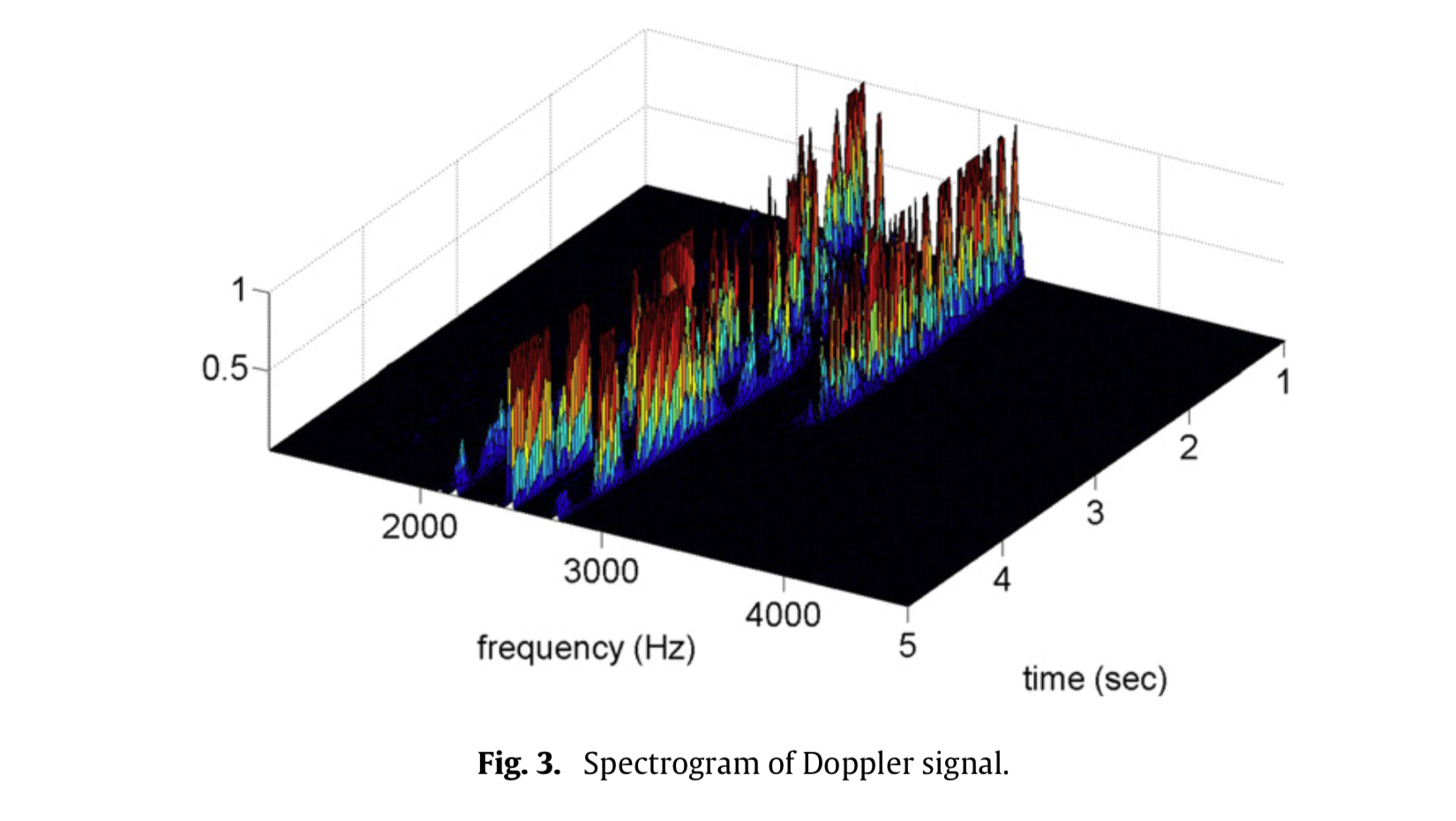
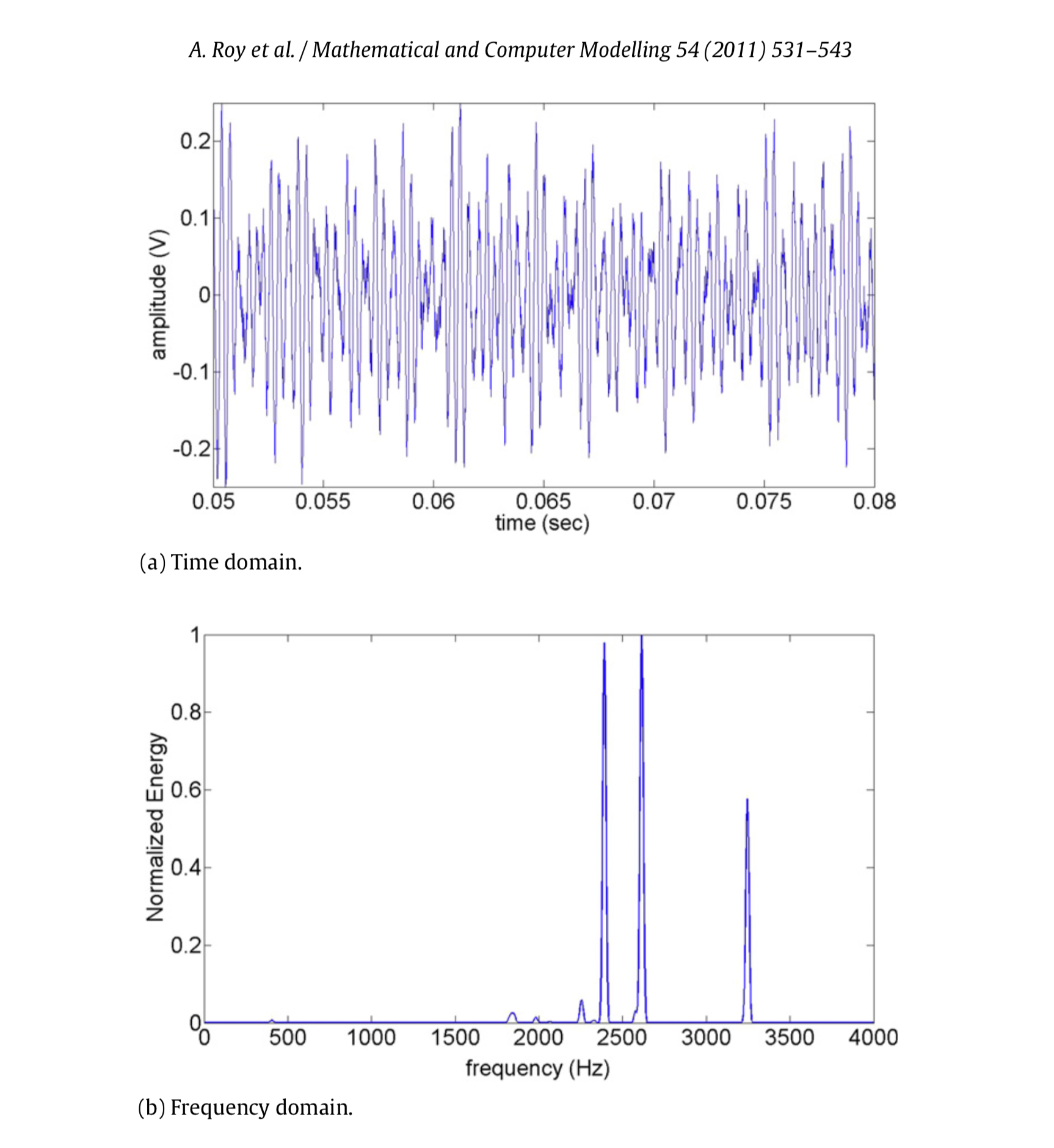
We created a cluster of RPI's with one attached to a sensehat for notification on the road, two cameras, one normal and one infrared for day and night vision, one infrared sensor. These all small tools act together to measure the velocity, of the Car/Vehicle, avoid blindspots for speeding vehicles. Using the concepts of doppler effect and the theorem of derivation for conical pendulum, we came to a conclusion for a probabilistic value if the person/deer/animal crossing the road, if he/she/it can come across a vehicle, if they do, we alert the vehicles speeding long before it comes near and hence avoiding the chances of an accident.
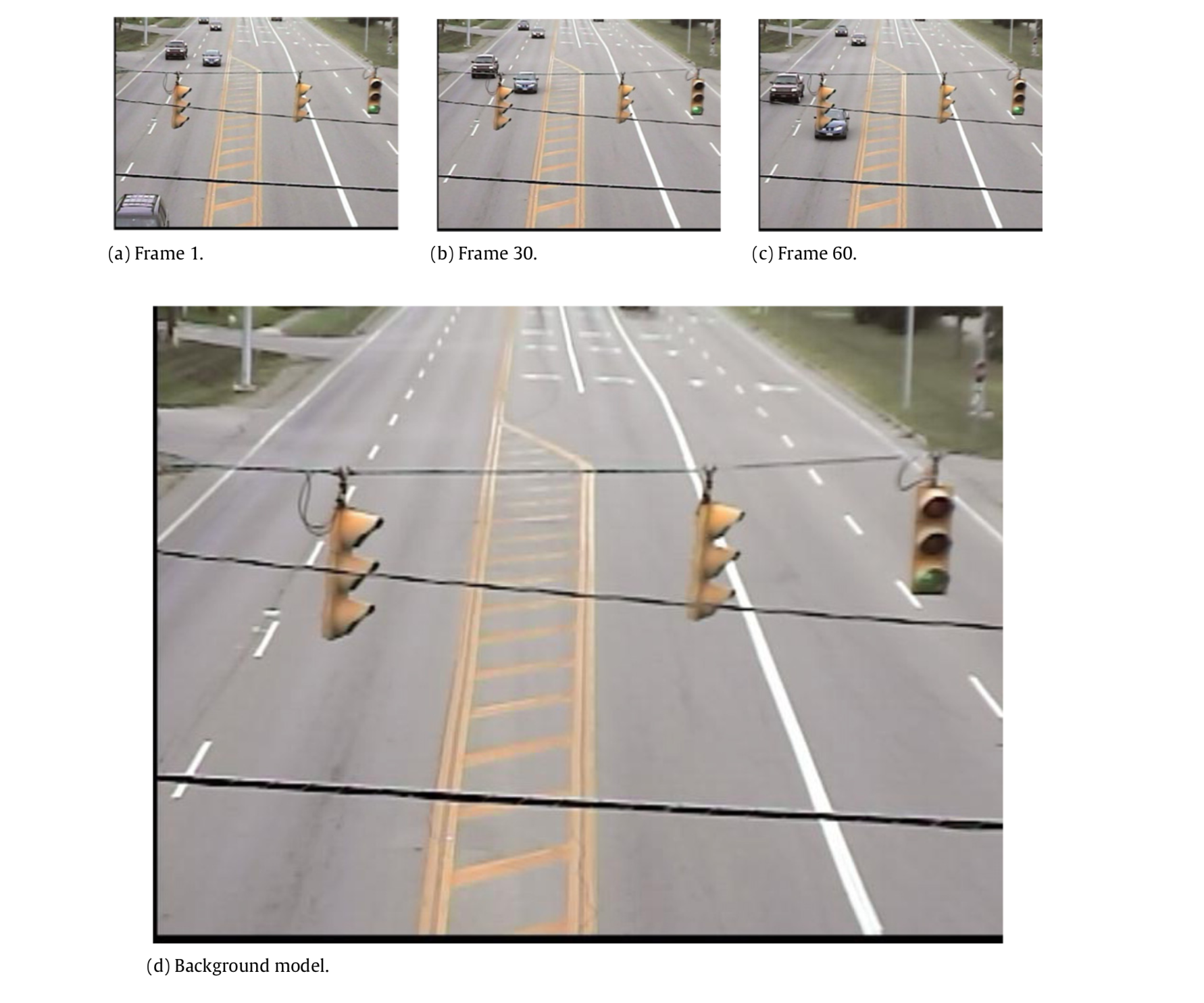
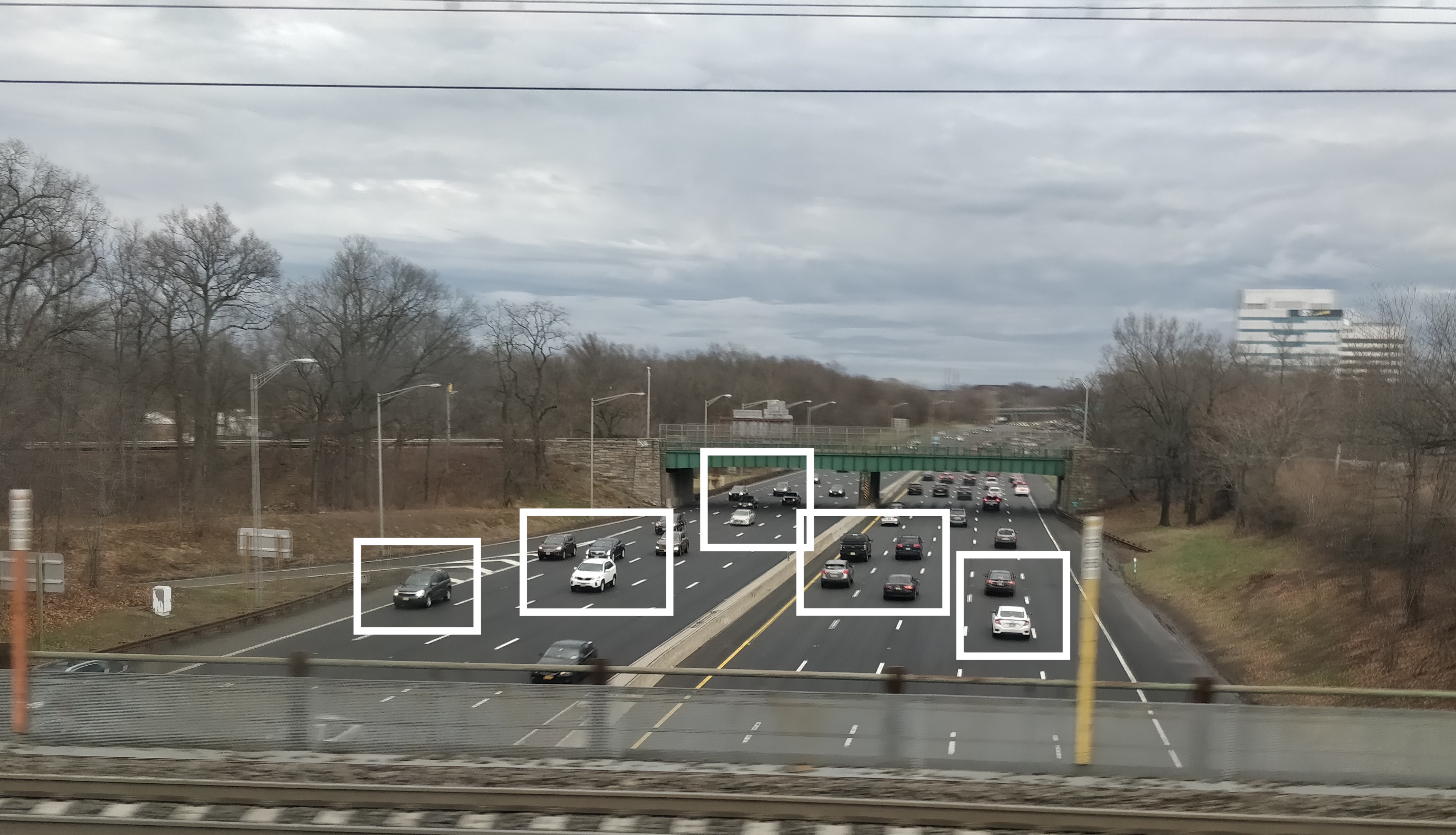
We also trained around 600 images on tensorflow for the cameras so that it can detect
People on road | STOP Car accident | STOP Deer on highway | CAUTION Slippery highway | CAUTION Cars on highway | STOP Curved highways | CAUTION (It can be trained for more)
Challenges we ran into
The first biggest challenge was getting all the raspberry pi's online without a monitor. We had an RPI with a hotspot configured for our phone. We cloned the image for other RPI's and then wrote the IP inside the file when it connected to a different network, then we again disconnected to the new wifi and checked the IP;'s. We then ssh'd the pi's and installed vnc and connected to each of them manually through vnc.
The second challenge was getting tensorflow on the RPI's. The issue is tensorflow is not built for rpi's. We had to recompile it from the source for a pi and still it was somewhat broken. Later it was not able to handle the load for training. We hence used Google Cloud Platform for the same. But the outgraph/neural net which was produced was of version 1.5 while the version supported by rpi is 1.0. We again had to recompile the graph for the pi and port it. This process itself took 7 hours.
The third issue, we mistakenly short-circuited the infrared light (of the infrared camera). But it does work, because it worked before burning the thing up in smokes.
Accomplishments that we're proud of
I'm proud of not attempting to incorporate any of the sponsor companies' APIs just to be eligible for their prizes because that would have caused unnecessary complexity and distracted me from achieving the main goal.
What we learned
How to be patient. Everything was crashing at some point of time due to some corrupt dependencies or something or the other. After almost completely built the proof of concept prototype, we came to know that a team from Wright State University in Ohio did write a paper similar to our project but never implemented it.
It is worth looking at: https://www.sciencedirect.com/science/article/pii/S0895717711001464
What's next for RoadRash
We do not create projects at hackathons to win, we create them to make actual products. Each and every product I have created at a hackathon have been implemented and used somewhere. The previous project I built at a hackathon was for blind people to detect food while buying groceries, etc. It was published on the play store and has started gaining popularity. Proof: https://play.google.com/store/apps/details?id=com.codenza.sherlock
Built With
- artificial-intelligence
- gcp
- infrared-sensors
- machine-learning
- raspberry-pi
- rpi-camera's-noir
- sensehat
- tensorflow


Log in or sign up for Devpost to join the conversation.