-
-
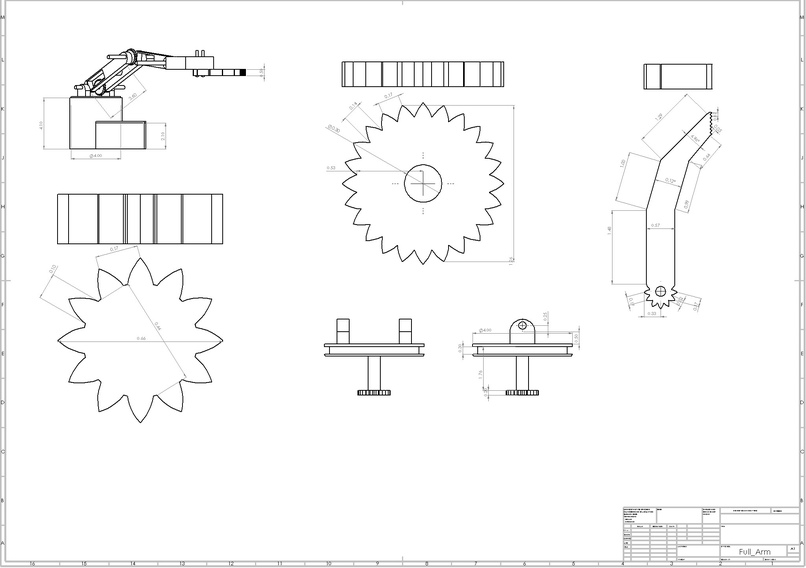
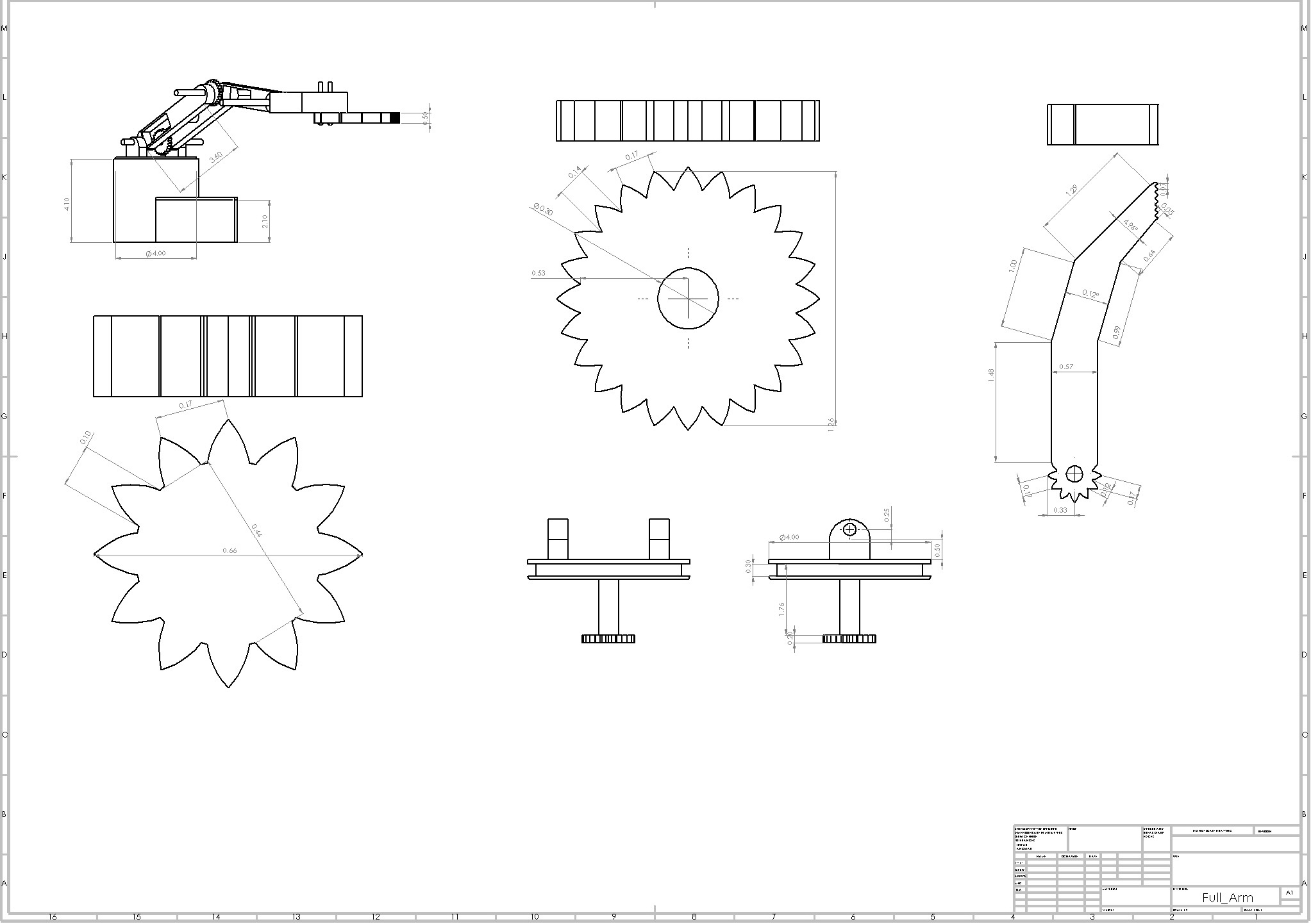
Drawing of custom gears and full custom CAD
-
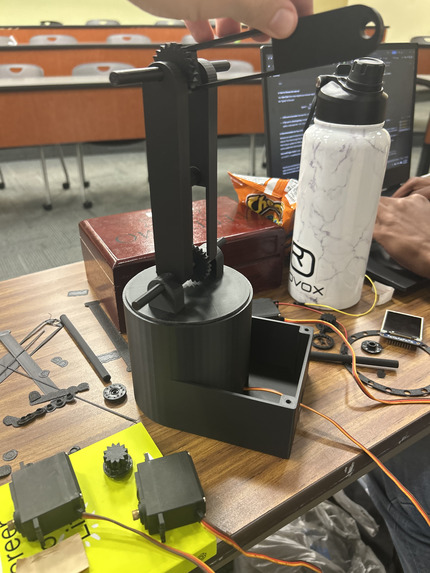
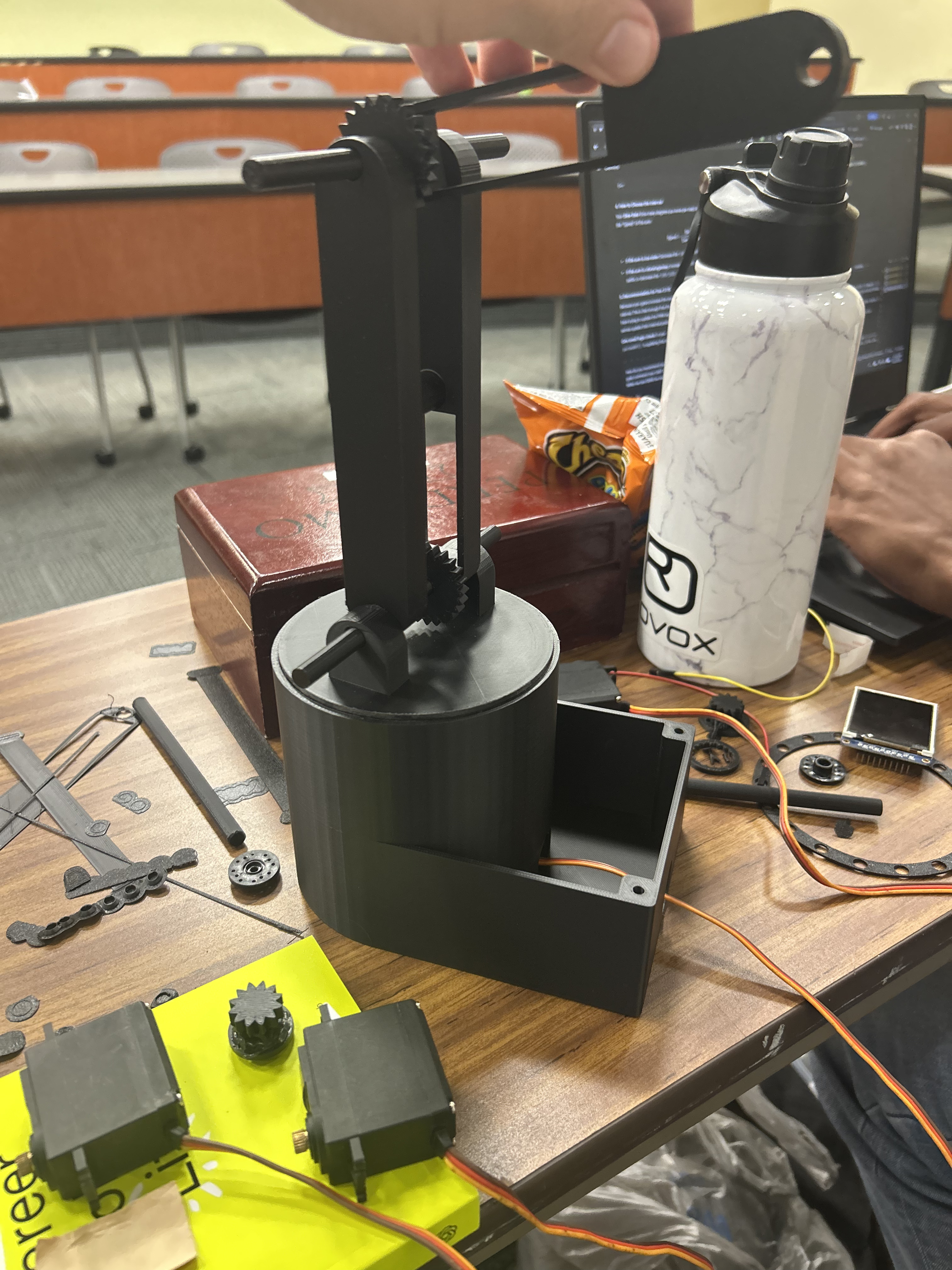
In Progress Robotic Arm
-
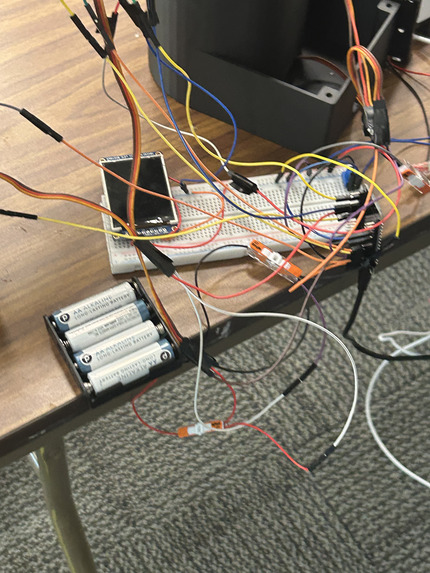
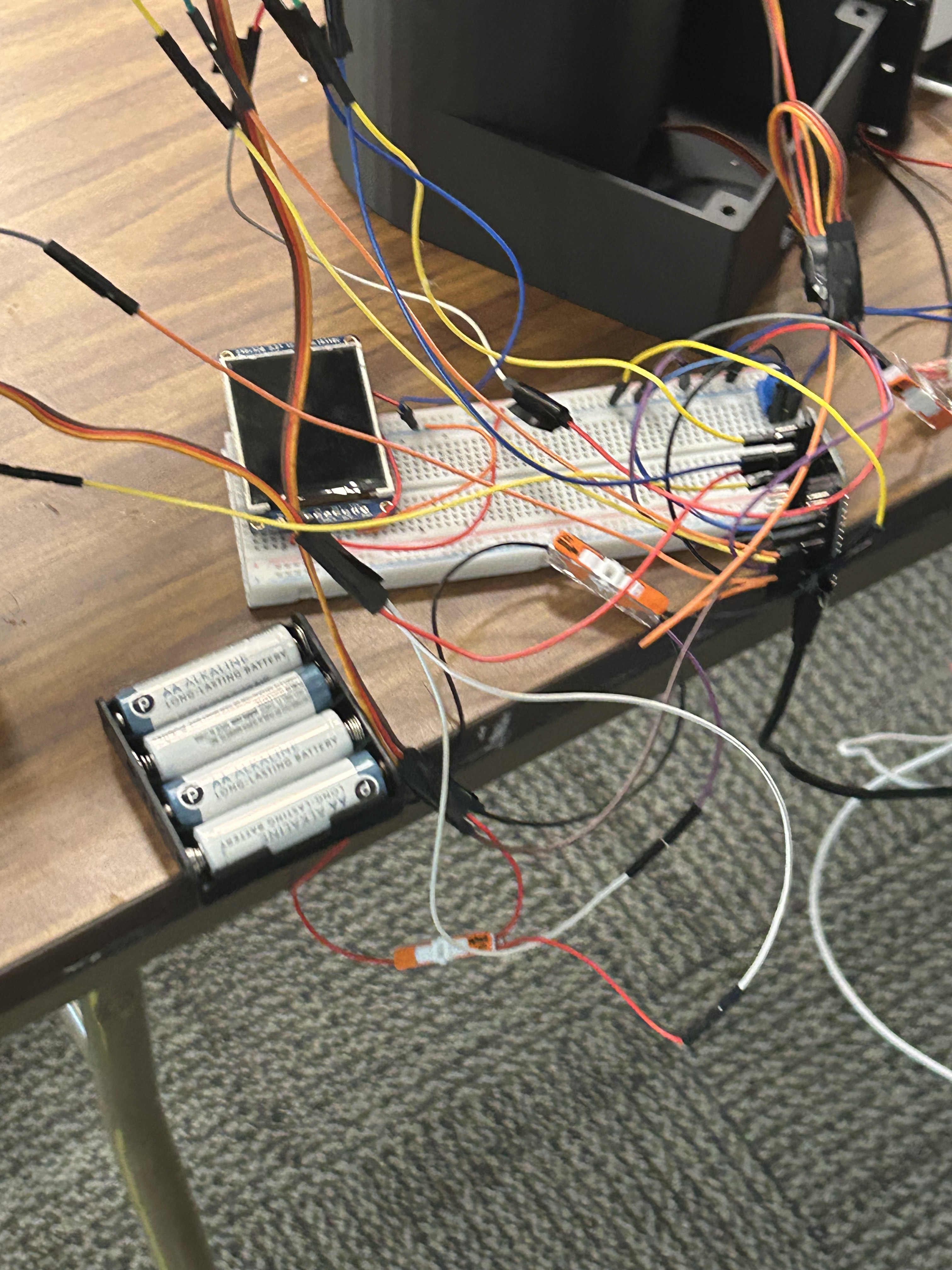
Electronics for Robotic Arm
-
Robotic Arm Full Design
-

Computer Vision Testing
-
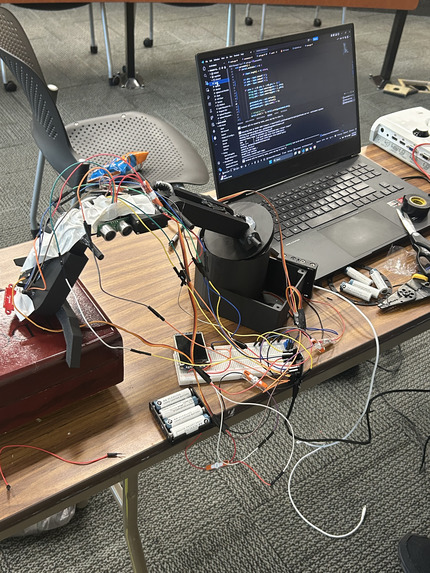
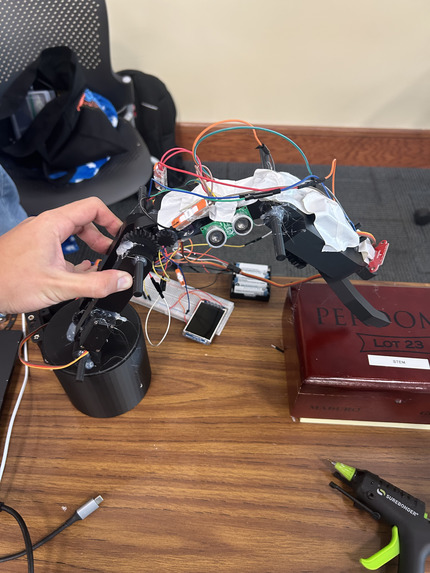
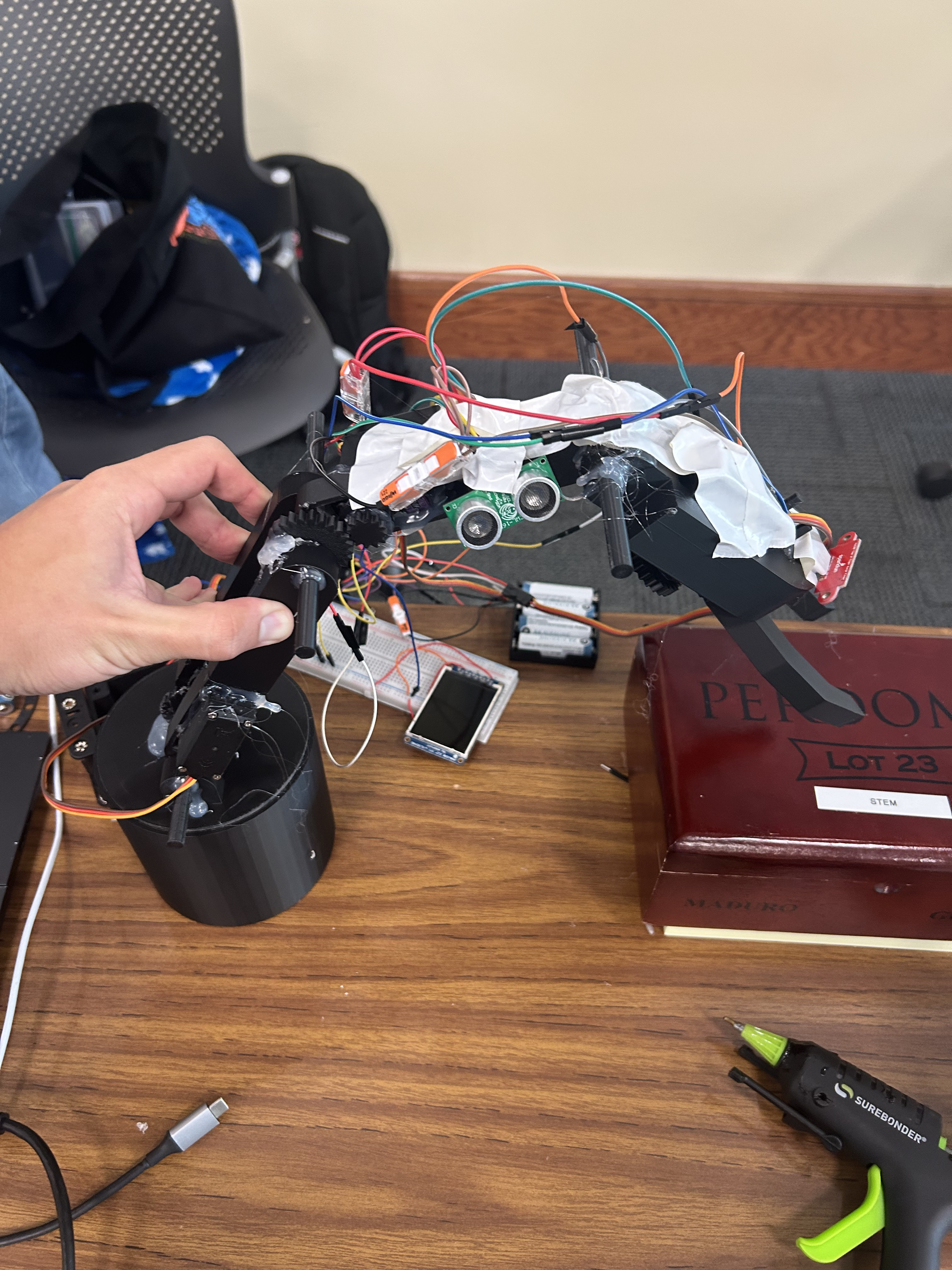
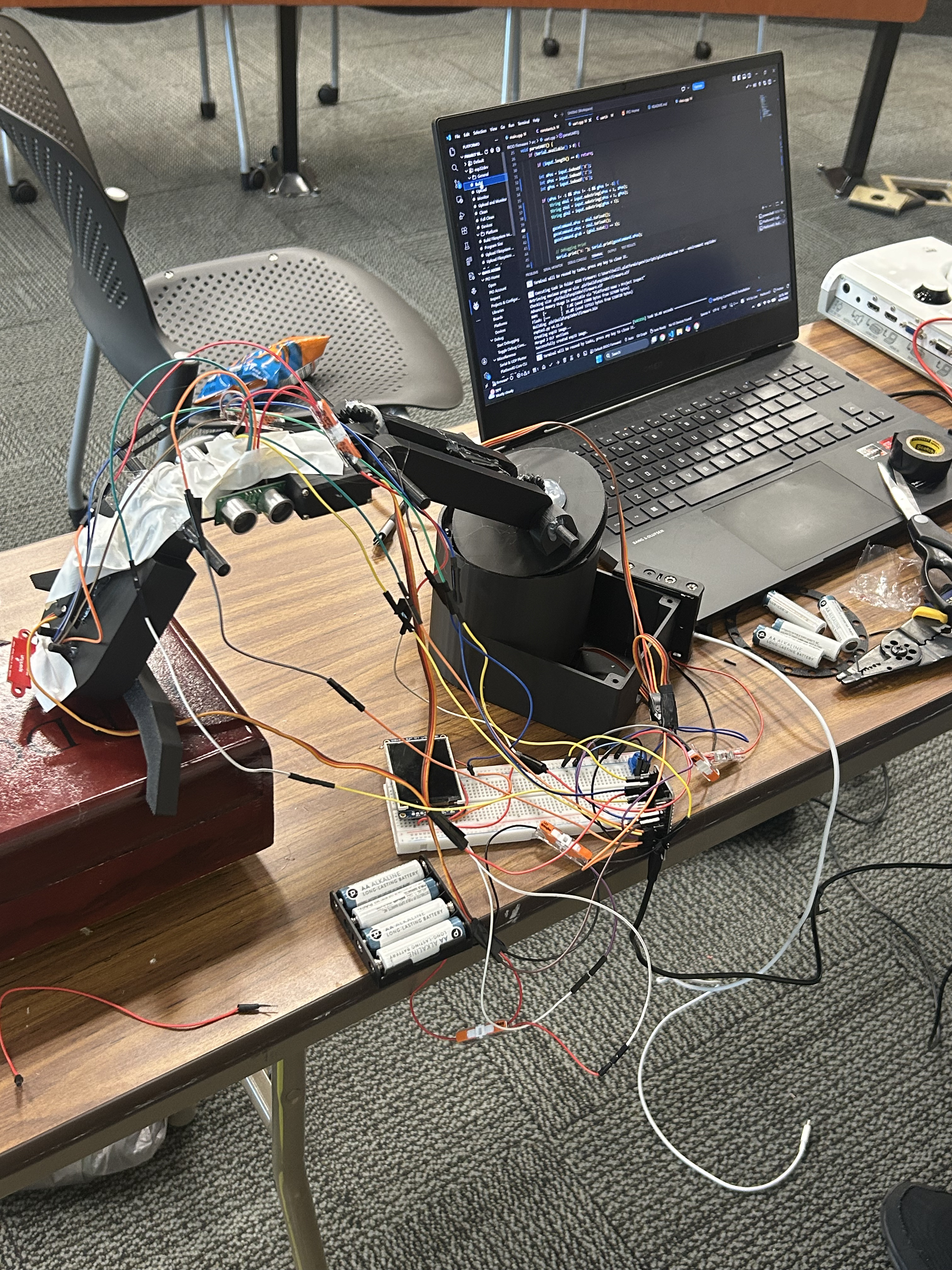
Robotic Arm, Wiring, and Programming

Inspiration
We wanted to create a world where physical barriers no longer limit a person's ability to interact with their environment. Whether it is a surgeon in a sterile operating room who cannot touch equipment or an individual with limited mobility who struggles with daily tasks, we saw a clear health and accessibility problem. Our inspiration was to build a bridge between intention and action, using the eyes as a natural interface to improve quality of life and physical wellness.
What it does
RIOO (Robotic Intelligent Optical Operator) is an autonomous, assistive robotic arm designed to help users find balance and independence in daily life. Using a Raspberry Pi 3 and a camera, the system tracks exactly where a user is looking on a table in real time. To ensure the safety and precision required for health care applications, the arm uses ultrasonic sensors as collision detectors to avoid hitting obstacles. It also utilizes a Time of Flight (ToF) sensor to determine exactly how close the claw needs to be for a safe grab. Users focus on an object to move the arm, close both eyes to trigger the grab, and raise their eyebrows to release.
How we built it
This project is a complete hardware and software integration built from the ground up. We designed every part in CAD and 3D printed the assembly using PLA+ within the 24 hour hackathon window. To maximize torque, we engineered custom 2:1 gear ratios for the joints. The hardware stack includes a Raspberry Pi 3 for MediaPipe iris tracking and an ESP32 to manage the firmware and sensors. We wrote custom embedded code to drive the PWM signals for four servos and implemented sensor fusion logic to combine gaze coordinates with ToF depth data. Everything is powered by a custom wired bridge between the Pi and the ESP32, creating a seamless assistive navigation system.
Challenges we ran into
The biggest mechanical hurdle was the center gear math. Because the robot is small, determining the optimal gear spacing for smooth rotation was incredibly difficult. The small scale also made the arm significantly top heavy, which threatened the stability of the device. Since we were on a tight deadline, we used a heavy portable charger as a makeshift counterweight to keep the base grounded. On the software side, we had to defeat the droop. Most eye trackers get confused when eyelids move, so we anchored our tracking to the orbital bones of the face to ensure the system remained reliable for users who might be tired or have specific accessibility needs.
Accomplishments that we're proud of
We are incredibly proud that we did not use a single kit for this build. Every gear, joint, and sensor mount was calculated and designed by our team in a single day. Solving the complex gear math for such a small scale assembly and implementing a full safety suite with ultrasonics and ToF sensors was a huge win. Building a working prototype that solves a real accessibility challenge using only raw materials and custom firmware feels like a major milestone for our team.
What we learned
We learned a ton about 3D coordinate systems, sensor fusion, and mechanical tolerances. We had to dive deep into how to map 2D camera pixels into a 3D physical space while using ToF data to verify our eye tracking math. We also got a crash course in gear ratios and center of mass physics. Most importantly, we learned that technology for good requires constant pivoting, whether that is rewriting gaze logic for better accessibility or using a portable charger as a weight to save a top heavy design.
What's next for RIOO
We want to refine the sensor fusion to allow RIOO to map its entire environment in 3D using the ultrasonics to further reduce harm and increase safety. We are also looking at adding more nuanced gesture recognition, like winking to rotate the wrist or specific movements to change tool modes. Eventually, we want to scale this up into a larger assistive device that can be mounted to wheelchairs or hospital beds, providing a meaningful technology driven solution for those who need it most.




Log in or sign up for Devpost to join the conversation.