-
-

ACR Autonomous Drive
-
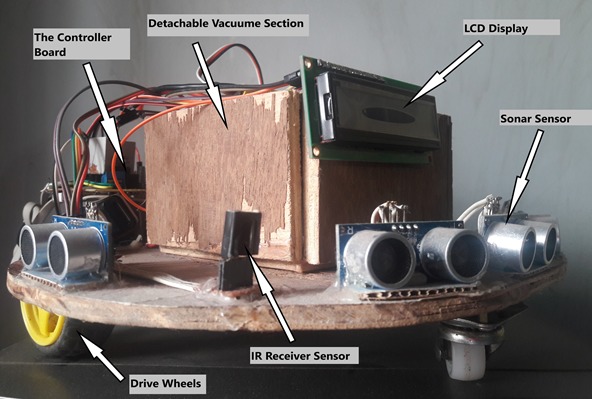
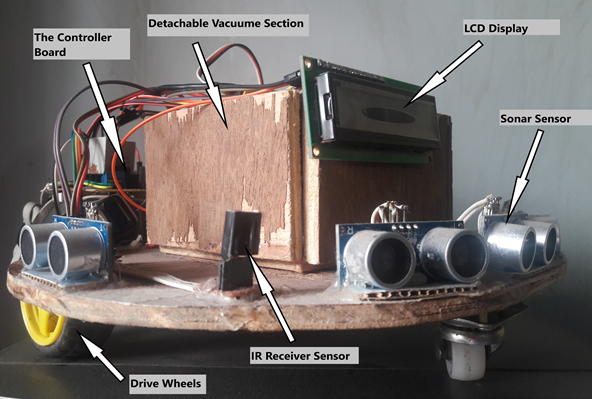
Components of ACR
-

Integration of UI with Robot Dashboard
-

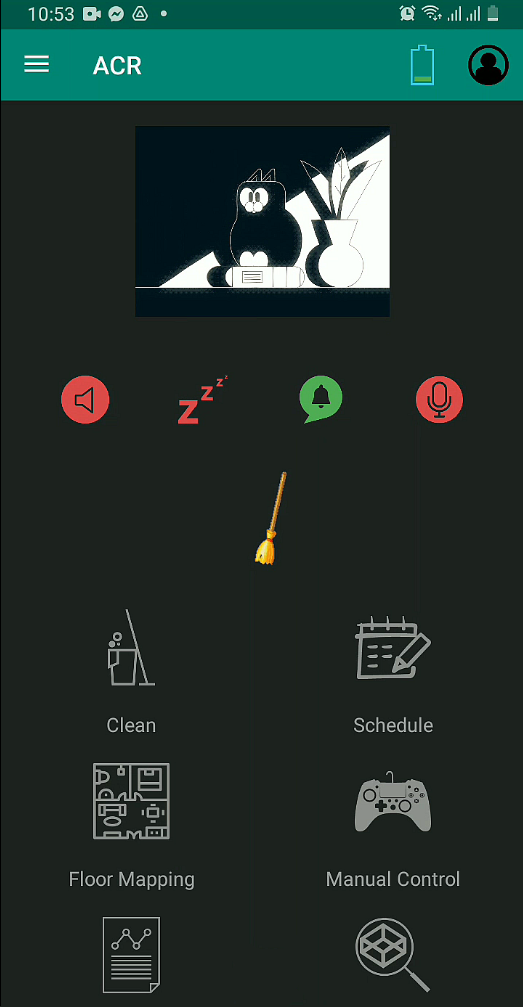
Application Quick Access Panel
-
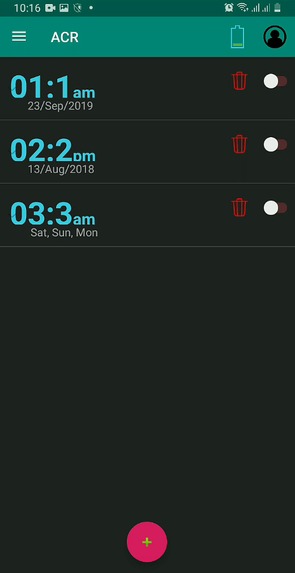
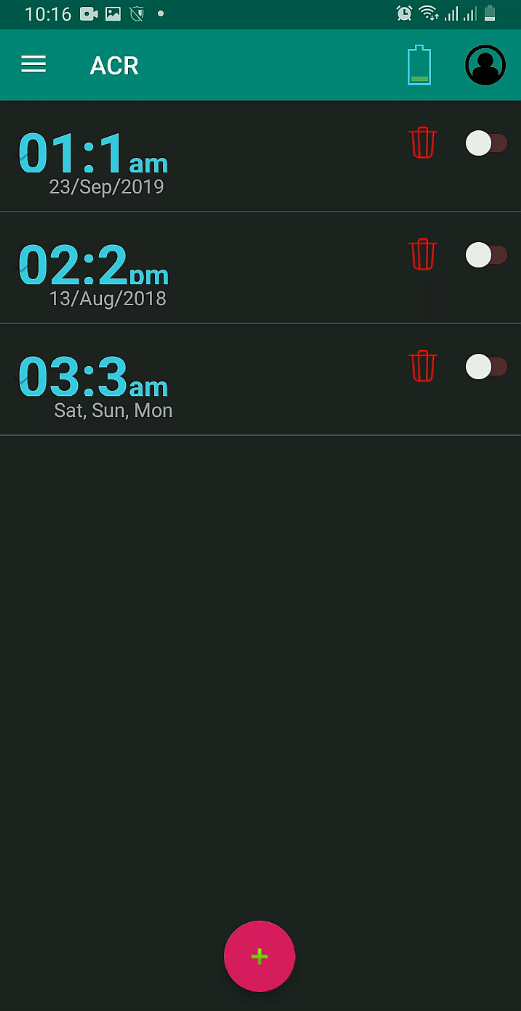
Wake-up Timer with App
-
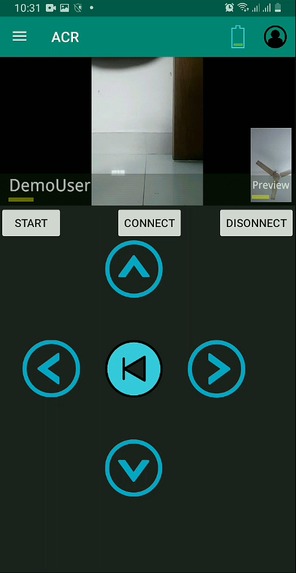
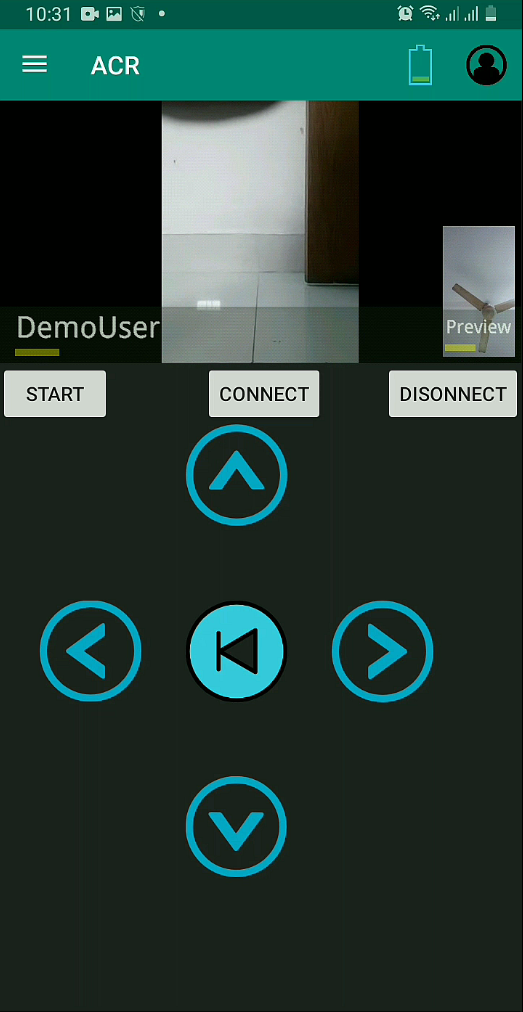
Live Streaming with App
-
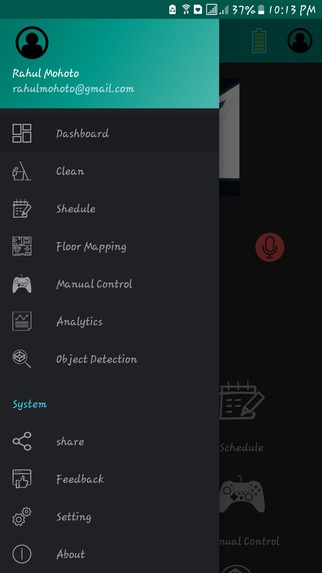
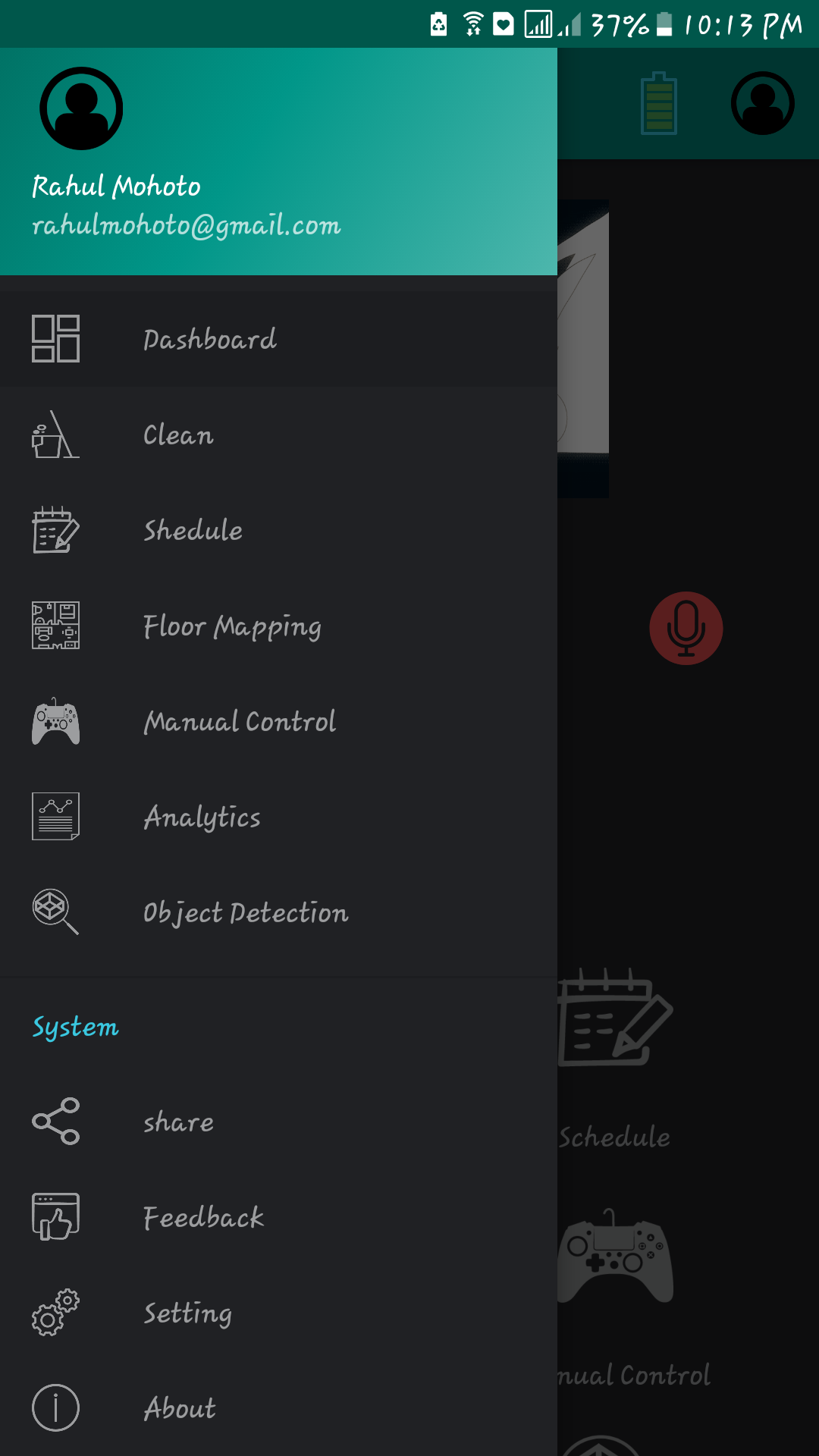
App Navigation Bar


Inspiration
During the covid-19 pandemic, we have learnt the ways of doing household tasks by ourselves. Not only that, the post pandemic situation would be more valuable in need of keeping those habits that grew within us. In our regular daily routine involves:
- Set an alarm to wake up or take medicine timely
- Do Cleanup(Vacuum dirt from the floor/mop the floor)
- Play with the kid(Mostly with toys)
- Time to leave for office!(And you forgot to switch off light or fans) So, the aim is to building a robot that can assist us with all of these tasks. This way, completing these task would be more enjoyable, also less effort will be required.
What it does
The robot
- can remember the time when to wake up,
- reminds you about taking medicine,
- helps with cleaning,
- can be used as a remote controlled toy for kids,
- and when we won’t be at home, it can also monitor indoor activities. For ease of access, all these have to be remotely accessible with an android app. Also the application will be secure, so that each time the user wants access, it can verify his authentication.
How we built it
The chassis was custom built and round shaped. It was made of plywood. The motor mounts was built with aluminum alloy, which made it lightweight and strong. Used microcontroller Raspberry-pi to control the movements of the motor, live stream with camera. Apart from sensing distance with sonar, infrared beacon was used to return to docking station when it had minimum battery level. Microcontroller ATmega8 was used to interface with infrared receivers . Used the GPIO pins of raspberry-pi to interface all the external hardware. To implement serial communication with ATmega8, Tx & Rx connections were used.
Challenges we ran into
- Building a mobile robot device with Raspberry-pi platform is pretty much difficult.
- To maneuver the robot with android application was troublesome as they both had to be connected under same LAN connection.
- To implement the features like autonomous return to charging dock, get to wake up at specific time etc. were very tough to pull over.
- Establishing serial communication between Raspberry-pi and ATmega8 was difficult.
Accomplishments that we're proud of
- The robot was successful to navigate itself to the docking station.
- It was able to sense it's battery level precisely.
- When there was obstacle, the robot avoided them successfully.
- While the operator couldn't find the position of the robot, it rang the buzzer on it.
- The robot was able to provide live feedback with the camera mounted on it.
- It was perfectly synced with android application.
- All the states of the robot, was visible with that app.
- Voice recognition was working accurately.
What we learned
- How to use serial communication between ATmega8 and Raspberry-pi.
- Ways of integrating components with Raspberry-pi.
- Infrared beacon can be used to autonomous navigation.
- Using React-Native on developing Android application.
What's next for Autonomous Cleaning Robot-ACR
- Making the ACR more intelligent is the next priority. Since there are unlimited possibilities where Raspberry-pi can be used, I am eager in exploring them.
- Some of the advanced features like: floor mapping(allows user to restrict area where not to clean), Statistics(amounts of dirt cleaned during one cycle) are still on work in progress.

Log in or sign up for Devpost to join the conversation.