-
-
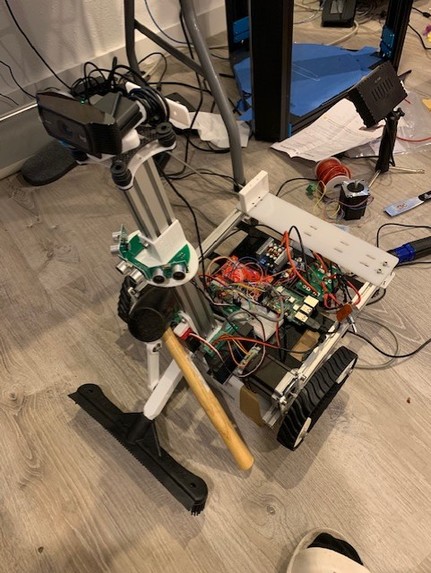
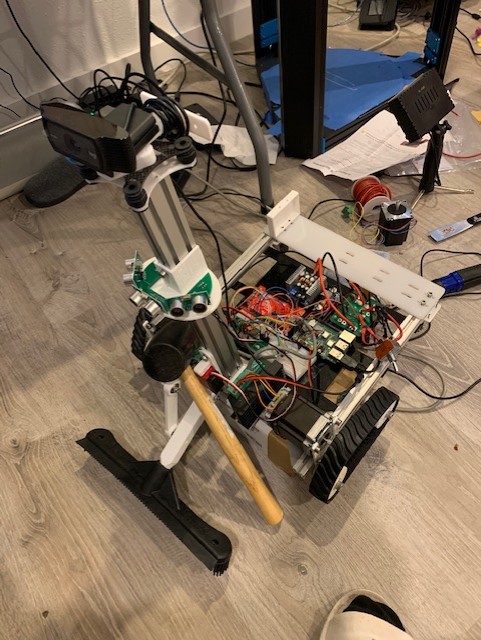
Sweeping Bot Prototype
Inspiration
CoVID, and the fact that labor is hard. It would be nice for physical laborers on a site to work from home.
What it does
Tele-operated broom with wheels. Allows a worker at home to remotely sweep up on a job site.
How we built it
Took some design from previous hack-a-thon, and expanded on it. 3D printed parts, T-Slot framing.
Challenges we ran into
Simulating the robot was harder than expected. Remote physical labor is a new concept. The size of the construction industry itself makes targeting use cases very hard.
Accomplishments that we're proud of
We can drive a robot around and sweep a room.
What we learned
Customer development is hard. Robot development is hard. Different markets ( US / Brazil ) have very different needs. Working with the mind of workers/managers.
What's next for Remote Labor
We'll pitch at the Startup round as well for the learning experience.

Log in or sign up for Devpost to join the conversation.