


Inspiration
The idea of this project comes from the movie "Real Steel", in which the boxer can remotely control a robot to do the same movement.
What it does
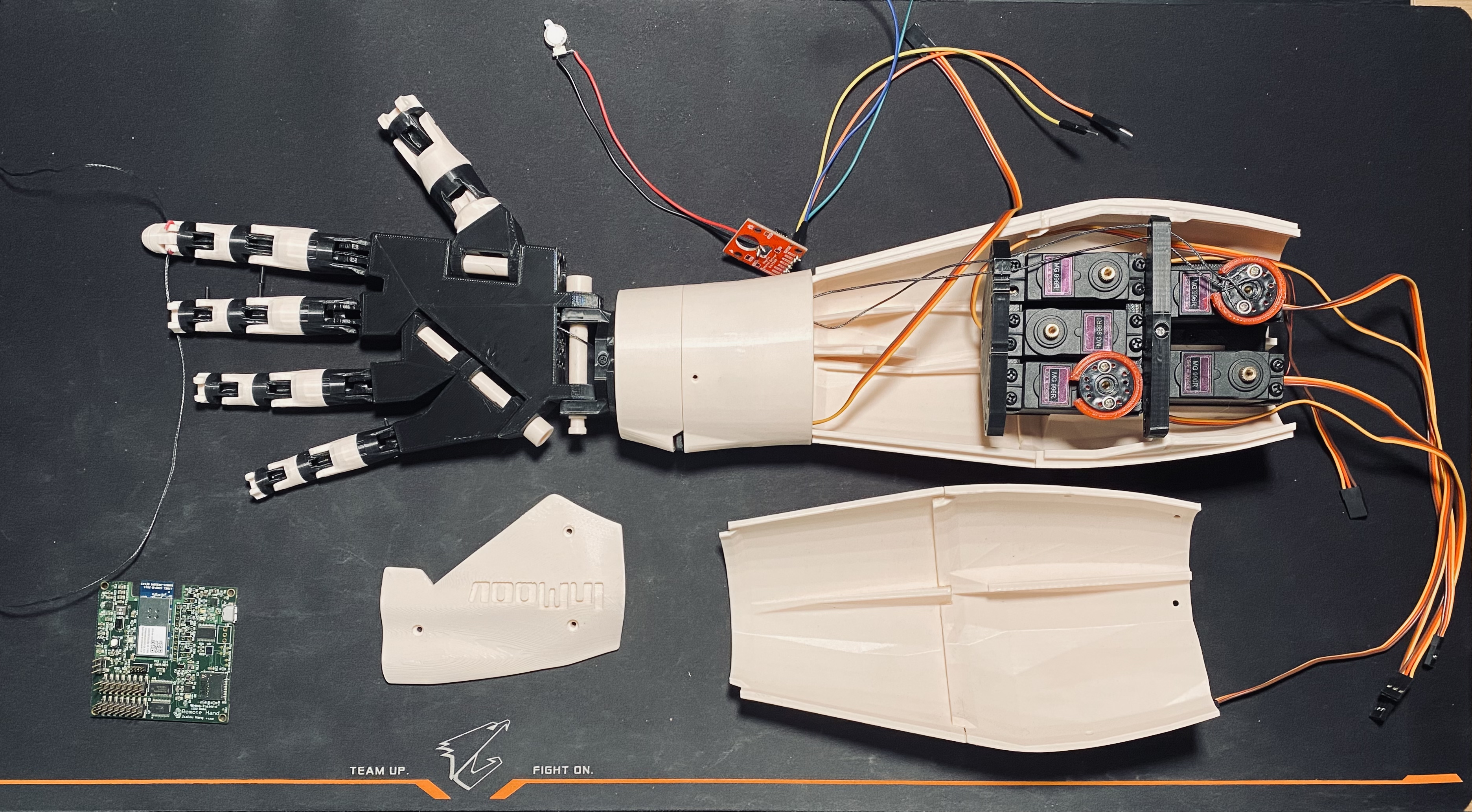
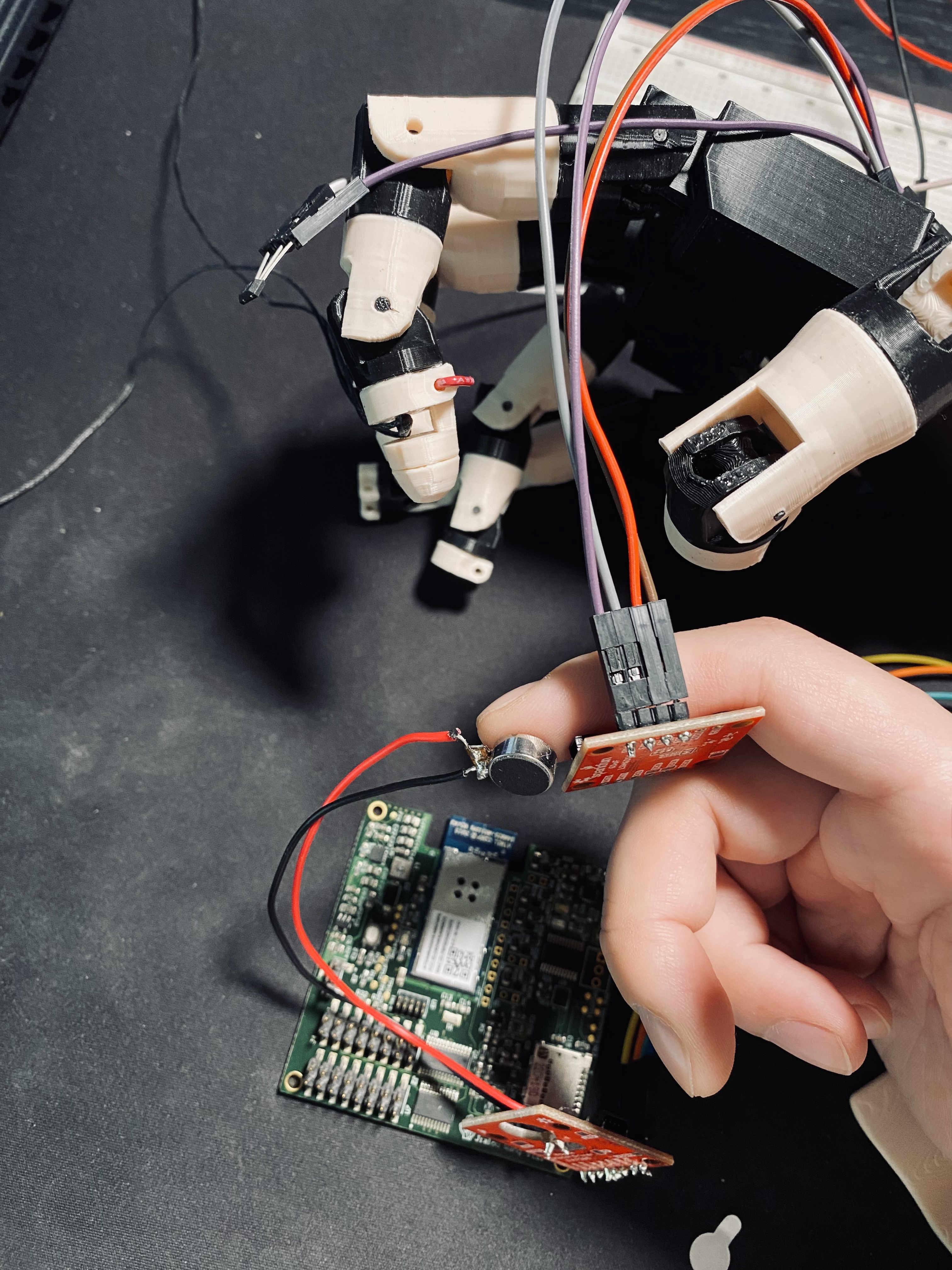
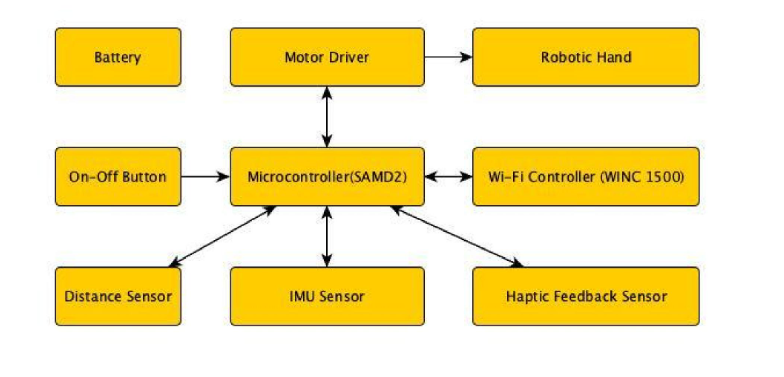
The IMU sensors track the finger movement and the board then controls the servo motors to move the robotic fingers do the exact same movement. Upon touching things with the robotic hand, the hall effect sensor gives analog data about how much the finger is touching the object and gives haptic feedback to the human finger.
How we built it
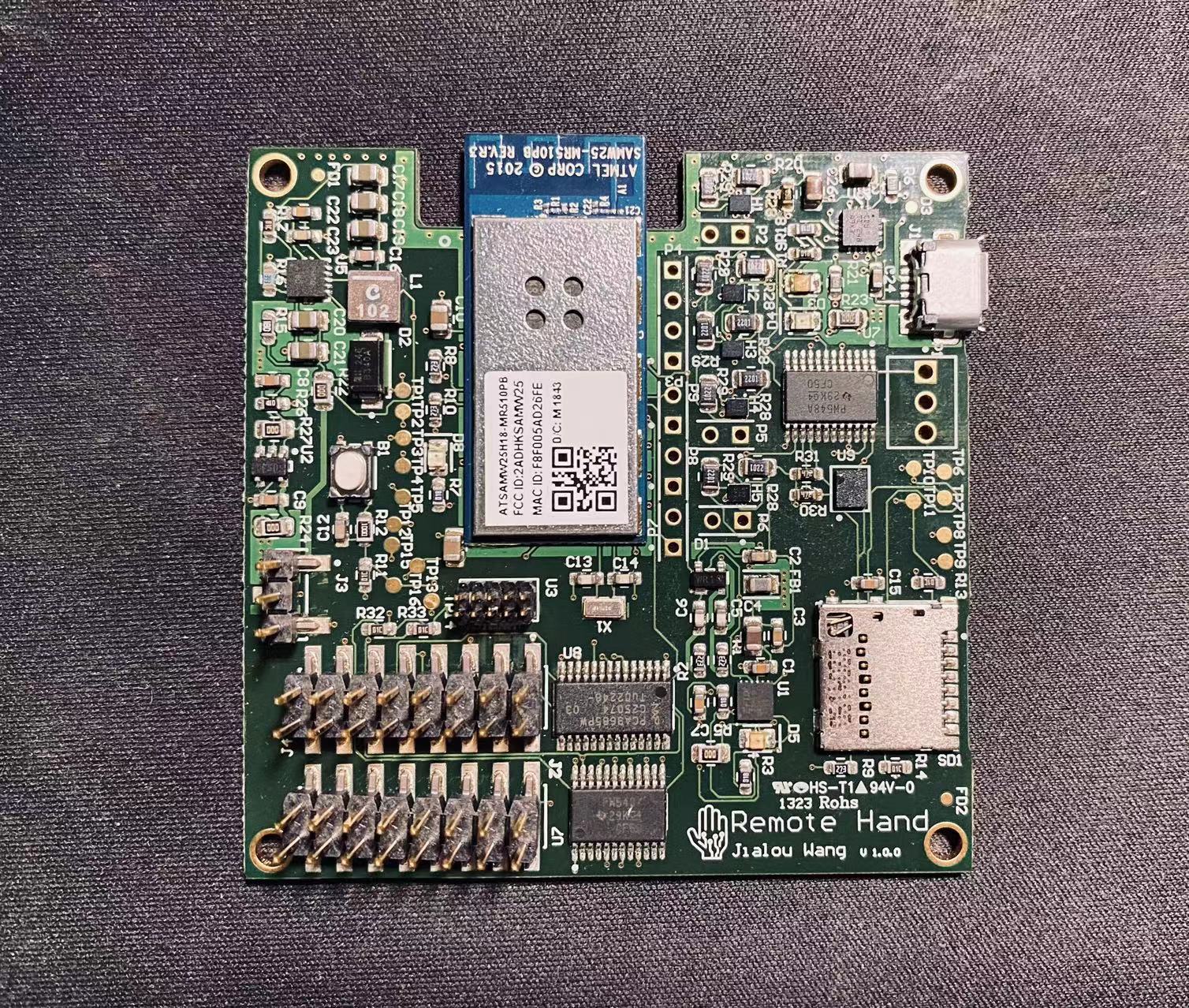
Designed the PCBA board, integrated with the Haptic Motor, hall effect sensor, IMU sensor and servo motor
Challenges we ran into
Trouble with allocating proper memory for the FreeRTOs Task.
Accomplishments that we're proud of
Cooperate the hall effect sensor with the haptic motor.
What we learned
Details about designing and making PCBA boards. Firmware Driver for motors and sensors.
What's next for Remote Hand
expand to all five fingers, more smooth hand movement and control
Built With
- atmel
- c
- mqtt

Log in or sign up for Devpost to join the conversation.