-
-

Types of Images
-
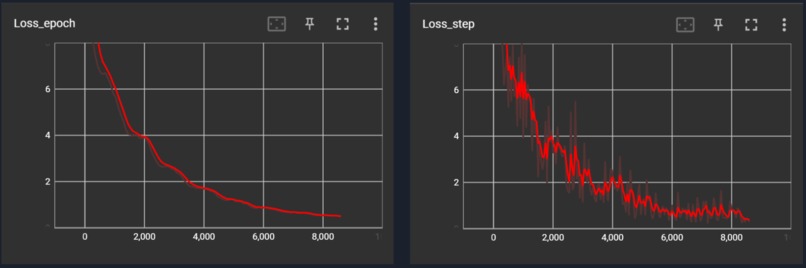
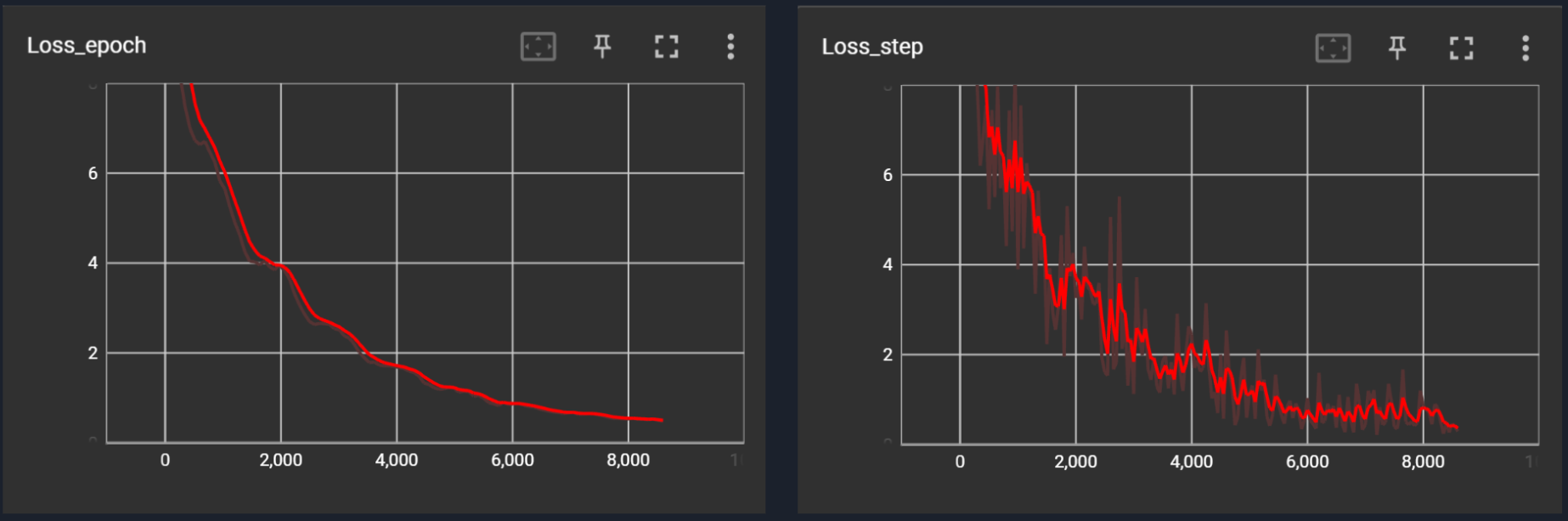
Loss Graphs

Inspiration
Farming practices rely heavily on herbicides, pesticides, and tilling to maximize profit and crop yield. Roundup, the leading herbicide introduced in 1973, requires GMO seeds allowing for heavy spraying of crops. In June 2020, Bayer agreed to settle Roundup-related cancer class action lawsuits for $10 billion. As a result, our food is becoming less nutritious and filled with harmful chemicals. Unmeasurable environmental impact from farming-related chemicals that end up in our water from the standard practice of tilling the soil Regenerative Agriculture and Organic Farming is the solution but poses financial and practical limits for farmers
Hackathon Goals
Collect images and annotate regions of interest for weeds found in a pasture Evaluate web-based online annotation tools that allow for team annotation and annotation assistance Create tutorials Do transfer learning using “ssdlite320 mobilenet v3 large” for weed detection using an NVIDIA Jetson Nano Build a “Billy Goat” robot that is powered by solar and trained to eat weeds
What it does
It is an AI model running on an Nvidia Jetson Nano that will detect weeds in realtime as a robot drives over them. It will then target them and drill them or remove them from the ground to serve has a herbicide process without chemicals.
How we built it
Three team members walked a pasture capturing weed images(n=351) representing 11 different weed types using two Android phones and one iPhone at 1920x1080 and 640x480 from an approximate height of one meter. After annotation ROI(n=645) The validation dataset(n=21) was captured at night using a flood light after model training. Based on reviews, LabelBox.com was selected as a web-based annotation tool with support for team annotation and drawing a bounding box around regions of interest. Requires proficiency to export images and data models with limited user interface Labelbox Tutorial: https://tinyurl.com/3md2hw75 Model training using Pytorch Lightning using COCO data format and deposit Kaggle(https://www.kaggle.com/datasets/devingator/weed-images) Data augmentation was not used because of training time constraint Overfitting a potential issue, so the number Epochs limited to 100 After training the model on our dataset, the next step was the implementation Our goal was to get the model running in real-time on a Jetson Nano We chose to use tensorRT as our framework due to the optimization and fast inference Running a model with tensorRT requires converting, which proved difficult as getting tensortRT installed on the desktop is an involved process, as well as getting torchvision running on the Jetson Nano
Challenges we ran into
We ran into issues with producing enough imaging data in the limited time constraint. This led to overfitting of the model that could be improved in future designs by adding in data augmentation or a larger dataset. Transferring the model to run on tensorRT also proved more difficult than expected, and we could not finish it in the time allotted by the Hackathon. The steps are clear but require more time, and it will be easy to implement the optimized model in the future.
Accomplishments that we're proud of
The model worked well for the limited training data that we provided and indicates strong potential for a working model with a more diversified dataset. We are excited about the potential of this project and will continue to develop it after this hackathon to be used in a hay field to improve the harvest quality.
Built With
- jetson-nano
- kaggle
- label-box
- python
- pytorch
- pytorch-lightning
- tensorrt







Log in or sign up for Devpost to join the conversation.