-
-
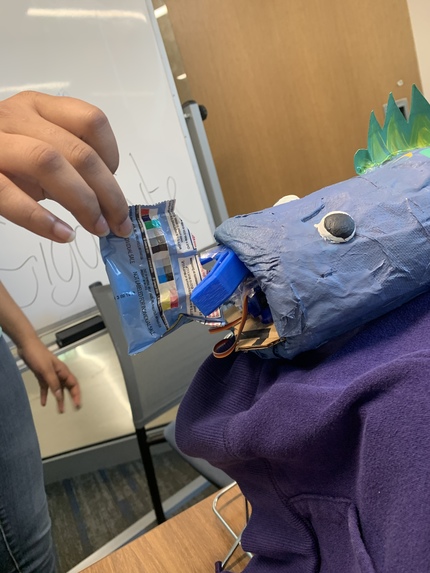
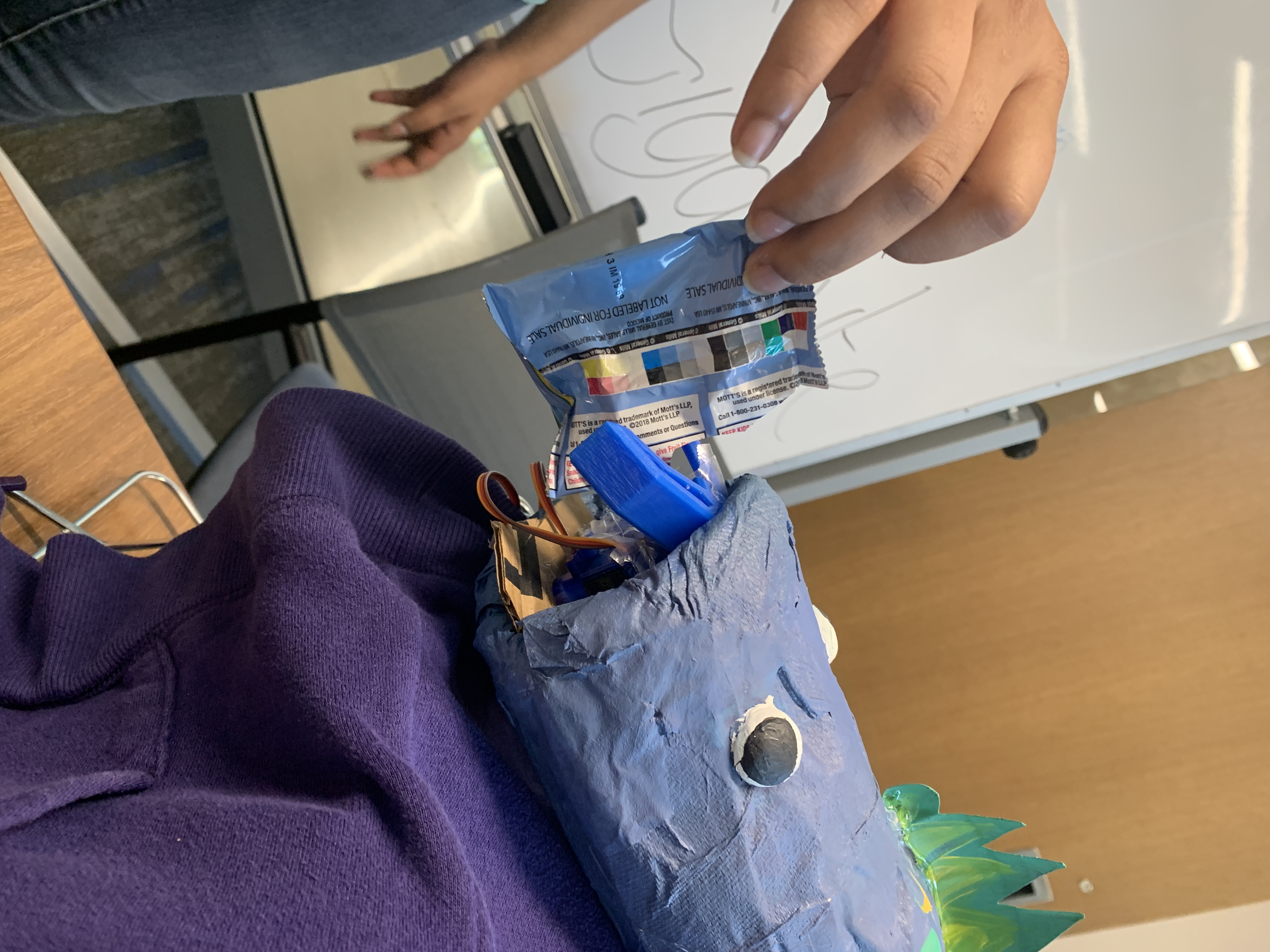
This is an image of the robofish taking in a piece of trash using its claw mechanism.
-
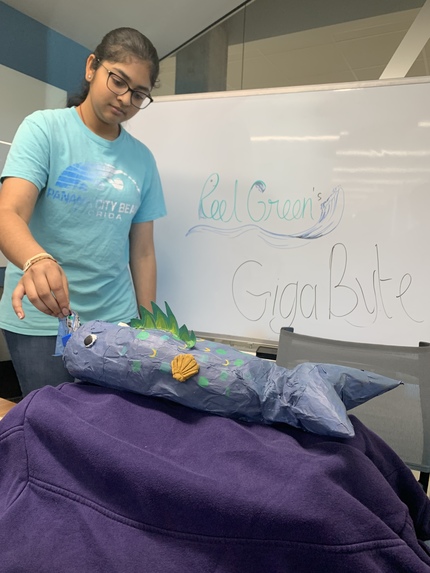
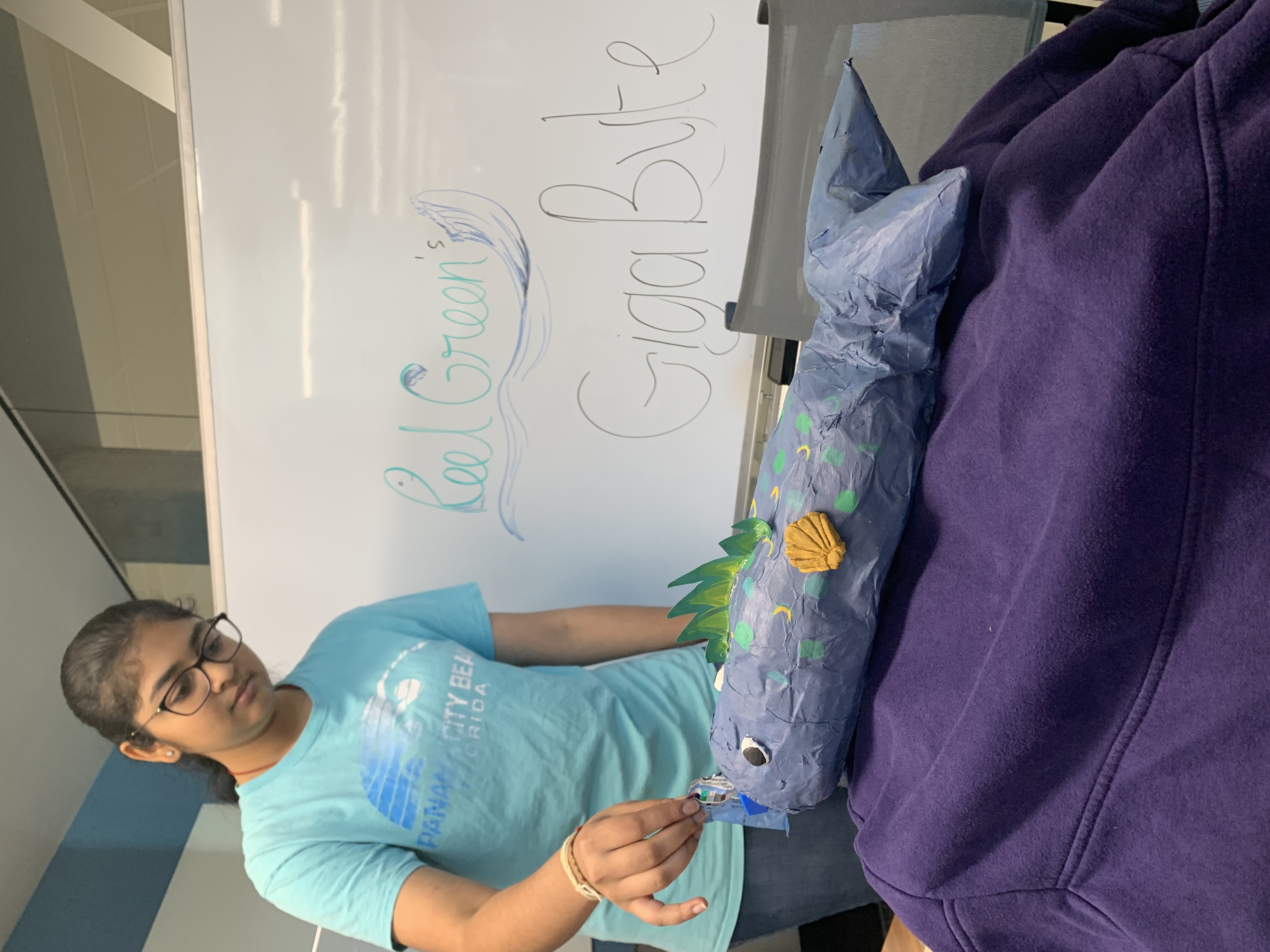
This is an image of the robofish (full image of fish's body) taking in a piece of trash using its claw mechanism.
-
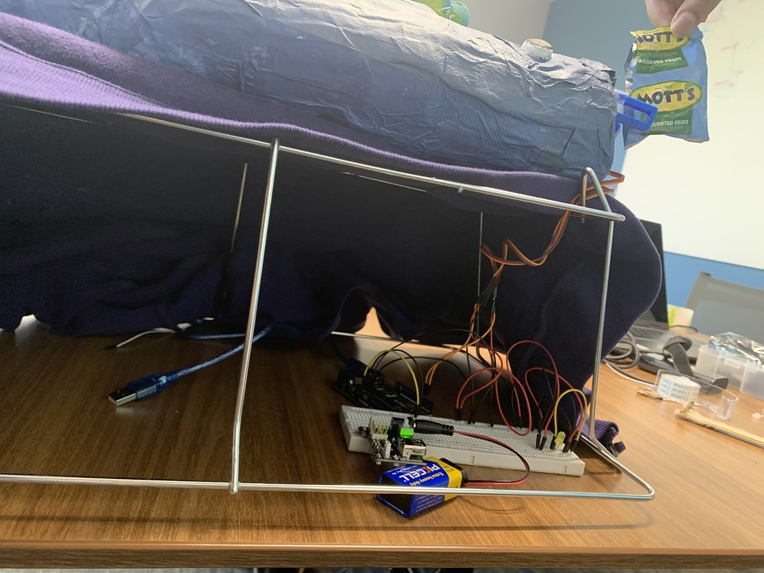
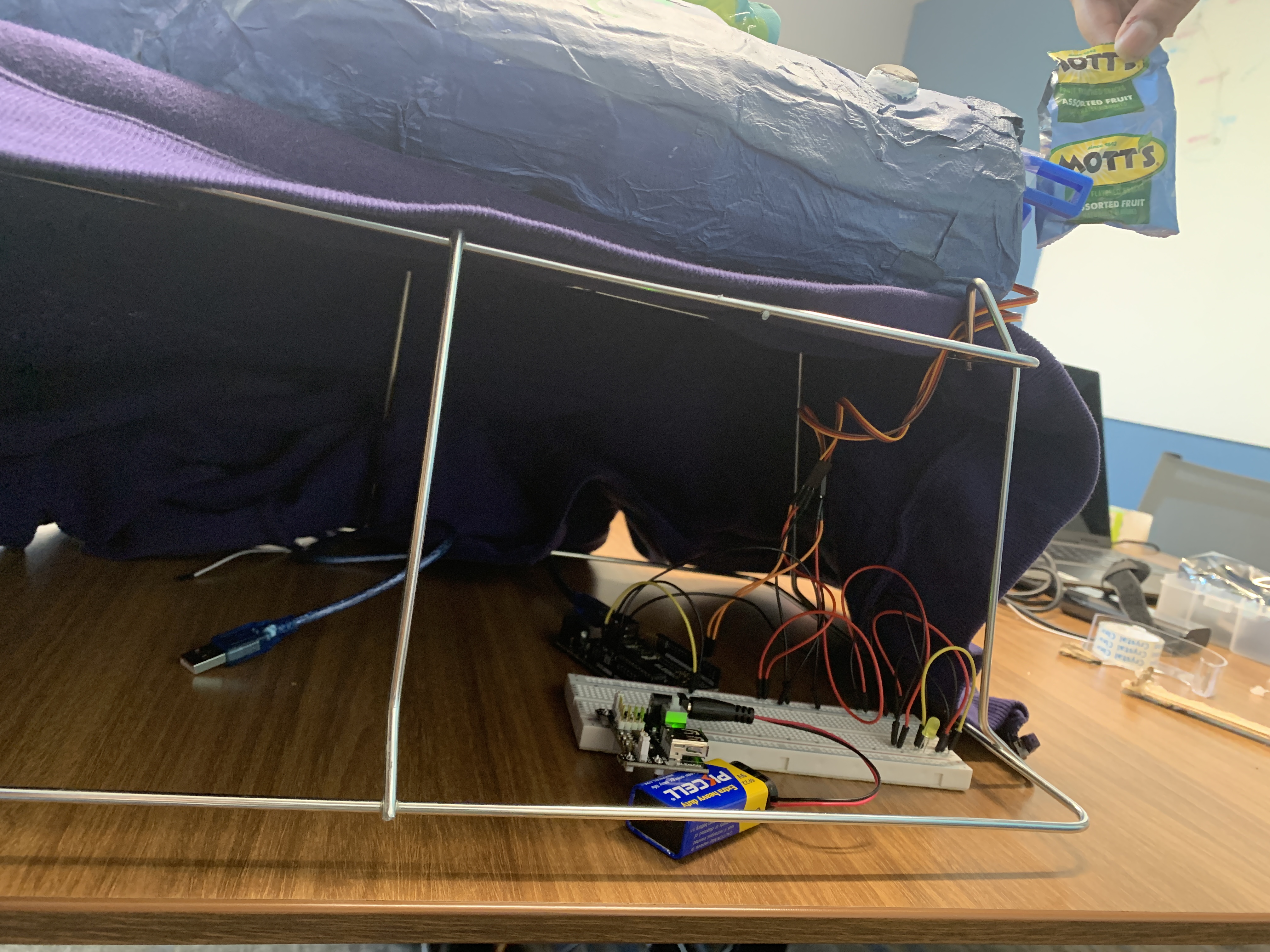
This is an image of the breadboard system made using the Arduino kit that powers the claw mechanism.
-
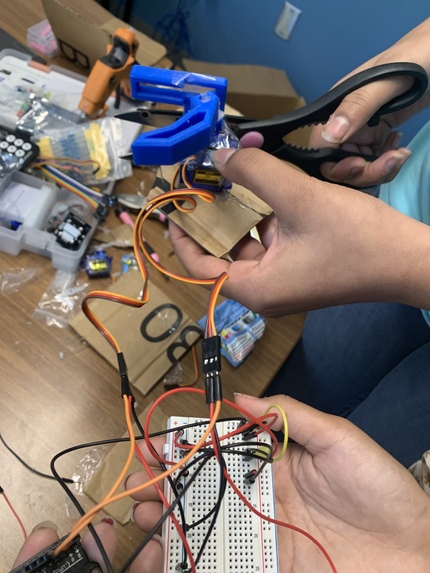
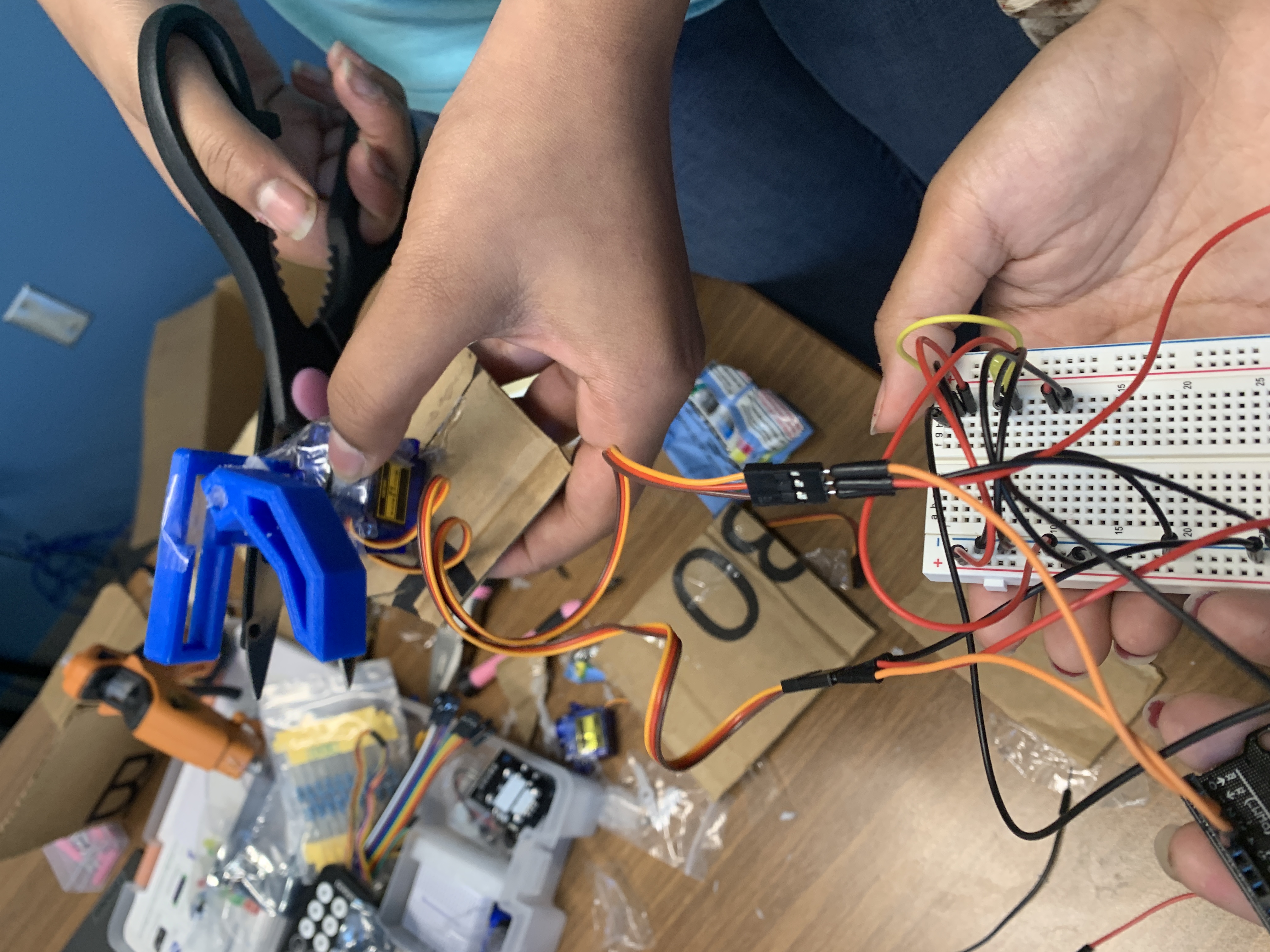
This is a close-up image of the claw mechanism that allows the robofish to pick up trash.
Inspiration
As we were brainstorming and looking into problems, we realized many fish caught and released in recreational fishing were often injured by the hooks, leading to their early deaths. We decided to create a more sustainable innovation that would prevent these unnecessary fish deaths while also allowing people to pursue the age-old sport of fishing. Once we attended the Arduino workshop at the Makeathon, however, we were hit with the sudden desire to utilize that technology and came up with the idea of a robotic fish that would collect hard-to-get trash from sensitive areas of the ocean using its claw. We were inspired by scavenging fish which naturally clean up their ecosystem by feeding on algae, for example, for our model. Also, we were driven by our passion for coral reefs, which not only face the threat of coral bleaching due to acidification of ocean water, but also get suffocated with plastic.
What it does
GigaByte, with the appearance of a fish that allows it to blend easily into the marine environment, can open and close its robotic claw, powered by Arduino, and move it left and right to pick up trash. Its small, friendly, and unassuming appearance allows it to do its job without much disturbance to the surrounding marine life.
How we built it
The Robotic Claw:
We made the claw mechanism using an Arduino kit, and we specifically used the Servo motors, the power supply, a breadboard, and pins. We made the claws by utilizing the 3D printer. Instead of using plastic, we printed our claw using PLA filament, which is corn-based and biodegradable. We also used recycled cardboard to support the structure of the claw mechanism.
The Main Structure:
We built a hollow papier-mâché Smallmouth Bass fish that is able to collect garbage. In order to create our structure, we cut 1.5" strips of cardboard that we made into rings to represent the intersections of our fish. We connected these rings and reinforced the structure to provide a solid skeletal structure for our fish. On top of this, we layered recycled materials, such as used paper towels, coffee stirrer packaging, Dunkin Donut boxes cut into strips, and past homework assignments and worksheets, that were soaked into the papier-mâché solution of two parts water and one part Elmer’s Glue. All of these materials are sustainably reused, recyclable, and biodegradable (including the glue). Additionally, we were inspired by Bite’s swimsuit and mimicked the pattern, even adding the golden seashell.
Challenges we ran into
- The papier-mâché and then the layers of paint we covered it with took very long to dry, so we used the hand dryers in the bathroom to quicken the process.
- None of us knew what Arduino even was before attending the workshop during the Makeathon. After attending though, we were enthusiastic about incorporating the technology in our prototype, but had a lot of difficulty getting the mechanism to start, keeping it from short-circuiting,
- We also faced the challenge of a long printing time for our 3D printed claw design (around 8 hours) which would rushed us and still likely not have given us enough time to finish putting the entire model together. Thus we had to simplify the design and insert structural supports during the printing process while also decreasing the filling in of filament.
Accomplishments that we're proud of
- Learning Arduino
- Creating a viable physical claw mechanism with just wires and then designing it through 3D Modeling
- Learning C++
- Crafting an entire papier-mâché fish from scratch sustainably using glue, reused paper (thus constructing our fish from Spanish quizzes, stoichiometry worksheets, and Genetics problems), and recyclable materials (such as the Dunkin Donut box from our breakfast)
- Learning about circuits and mechatronics
What we learned
Skills-wise we collectively immersed ourselves in the field of mechatronics, something pretty new to most of us. Throughout the process, we learned about setting up a breadboard, avoiding short-circuiting, programming in C++, and designing. On another note, we also learned about the value of collaboration. All of us team members coming from different backgrounds/majors ourselves (CS, Mechanical Engineering, Biomedical Physiology, and Biological Engineering) we came to realize how helpful the different perspectives from the various fields of study were in producing our pioneering interdisciplinary innovation. This was of course in addition to honing our skills of resourcefulness. Working with solely sustainable and reusable materials was difficult, especially as they were in short supply, just as learning to use new technology required much dedication, research, and creativity.
What's next for Reel Green
Currently, our innovation is still in the development process but we intend to scale up our model. We hope to improve the method by which our robotic fish, GigaByte, picks up trash with its claw and inputs it into its “stomach” while also increasing the quantity of trash intake, thereby creating a new and improved robotic fish, TeraByte. Additionally, as of now, GigaByte can only move its claw as we have programmed it to. In the future, we plan to utilize sensors and perhaps even artificial intelligence to enhance its ability to pick up trash on its own based on what it senses.




Log in or sign up for Devpost to join the conversation.