-
-

Canada's Lake Erie Affected by Algal Blooms
-

Close-Up of an Algal Bloom
-
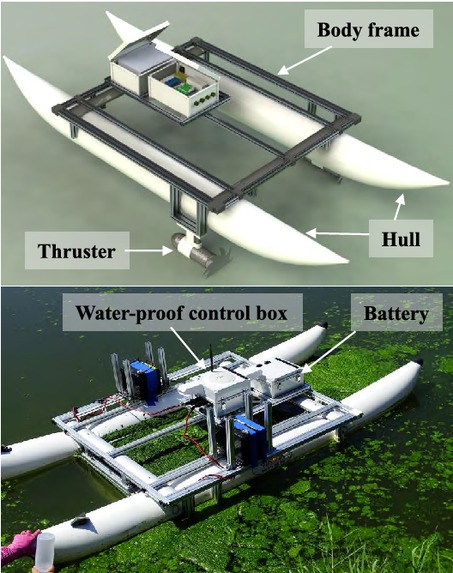
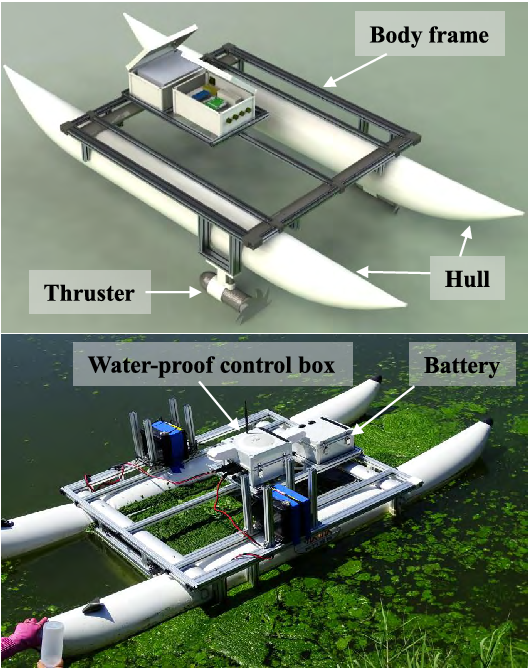
Simple Robot Labels (NOT MINE, from https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=8070956)
-

Possible Algae Biofuel Pathway
-

Outriggers / Stablizers (on the sides of main chassis)
-
Oxygen Diffusers (will be on the bottom of the outriggers)
-

Wind Sensors (On the Front of robot)
-

pH sensors (Held slightly in under the water surface)






Inspiration
An algal bloom refers to a rapid growth of algae within a water body, typically driven by an excess of nutrients such as nitrogen and phosphorus. Harmful algal blooms (HABs) need to be addressed urgently in Canada due to their severe impact on water quality, which can harm aquatic ecosystems and pose risks to public health. They can lead to the production of toxins that contaminate drinking water and affect recreational activities. Additionally, HABs can disrupt local economies reliant on fishing and tourism, making prompt action essential for environmental and economic reasons.
Specifically, in my local community, there is growing concern about toxic algal blooms and the extensive damage they inflict on the Great Lakes of Canada. My science summative exam focused specifically on the issue & effects of harmful algal blooms, and so, I wanted to address the issue.
What it does
My solution to HABs is a multi-robotic solution designed to monitor, prevent, and mitigate algal blooms in water bodies. The system utilizes a combination of sub-robots & functions. It first checks the water quality to detect early signs of algal blooms. Then, it utilizes environmentally friendly methods to inhibit algae growth. Finally, as it moves along the water, it removes algae in a controlled fashion. Thus, within a week to a month, this robot should be able to significantly reduce the algal bloom severity.
How we built it
To detect early signs of harmful algal blooms (HABs), the robot is equipped with sensors (specifically chemical & electrode type) for monitoring nutrient levels (nitrate, phosphate), temperature, pH, and chlorophyll-a concentration. The sensors include a range of water quality sensors, including pH, dissolved oxygen (DO), conductivity, turbidity, temperature, oxidation-reduction potential (ORP), nitrate/nitrite, chlorophyll, ammonium, and phosphate sensors. These sensors, housed in a waterproof casing, are strategically placed on the robot to capture accurate readings at different depths. Data from these sensors feed into a Random Forest machine learning model trained on the HABSOS dataset, which predicts HABs by analyzing key patterns. Notably, higher nutrient levels, increased temperatures, and lower pH are strongly correlated with rapid algae growth. This data collection also helps scientists discover and look into HABs more.
Next, the robot navigates the water using a camera and ultrasonic sensors, with Python and ROS facilitating real-time obstacle avoidance (including areas with strong currents, submerged obstacles, thick vegetation and floating debris). It uses path-planning algorithms like A* or Dijkstra’s (depending on how efficiently can the robot traverse) to cover the water body. For accurate mapping, SLAM (Simultaneous Localization and Mapping) is used along with extensive use of highly detailed similar-map data collected in advance. The robot's solar panels are equipped with sunlight tracking to maximize energy capture, and a backup battery ensures continuous operation during low-light conditions.
Finally, to control algae in large lakes or ponds, the robot uses a combination of methods. It emits ultrasonic frequencies (20 kHz to 2.5 MHz) to rupture algae cell membranes, however this may take time to effectively prevent HABs. Alternatively, the robot could use diffusers to boost oxygen levels, which decreases nutrient concentrations to fuel their growth. However, it is crucial that the robot remains eco-friendly and does not exacerbate the existing ecosystem issues, such as algae blooms. To ensure this, various inhibition methods will be tested in a smaller water body. Scientists will then evaluate these results and make necessary adjustments to the robot, similar to how Tesla vehicles undergo periodic updates to improve performance.
Design
The robot is modelled after the design described in this IEEE paper (https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=8070956). It features similar outriggers or stabilizers, which resemble white kayak-like structures. These outriggers support various components, including automatic fins, rudders, motors, and multiple water quality sensors, with some exceptions. Ultrasonic frequency emitters (essentially ultrasonic sensors) are located at the middle underside of these outriggers, along with oxygen diffusers at the bottom.
To ensure the integrity of the electrical components, all top-mounted parts are securely encased to prevent water ingress. Navigation sensors, such as the ultrasonic sensor, camera, and wind speed sensors, are positioned on the top of the robot. Batteries and memory hardware are mounted on the sides, while solar panels on the top provide power generation. Some of these components are illustrated in the image gallery above.
One of the main challenges of this design is its considerable weight due to the numerous integrated parts, which may lead to reduced speed and efficiency. To address potential balance issues, the robot is equipped with air- or foam-filled outriggers that enhance buoyancy. These outriggers contribute to approximately 20% of the robot's total weight—a reasonable trade-off given their critical role in maintaining stability.
Challenges we ran into & What's next
While the robot is capable of retrieving an enormous amount of data, it is incomparably smaller than a lake. So, one of the biggest challenges for the robot is to efficiently cover a whole lake with a low time consumption. The best way is to not cover the full lake. Ideally, we make the lake into a grid with many small squares that will each contain an area with a uniform distribution of the data parameters (pH, light, etc...). Then, the robot would cross diagonally or according to an optimal algorithm to cross through most of the squares while receiving square-accurate data.
After mapping the water and assessing algae levels, the robot calculates the algae amount to predict growth, so it can remove some algae from the surface, using it for further data analysis, hindering algae growth distribution, and/or biofuel generation. Unfortunately, as time passes into July, the algal blooms occur much more frequently, making it difficult for the robot to solely handle the problem. That's why the robot is deployed much earlier than July to remove the algal blooms before they have in a controlled fashion. Additionally, for a robot like this, optimizing energy generation is a key challenge, which is why a solution is algae biofuel. However, this requires balancing energy production with the cost of harvesting. Algae is abundant in dense algal bloom-containing waters. However, this can hinder the robot’s sensors, so a potential solution is to chemically break down the algae or use water currents and ultrasonic waves to disperse them, making it easier for the robot to navigate and process the algae. Fortunately, we can reduce energy consumption by using wind sensors, GPS, gyroscope & accelerometer, and sail/rudder actuators, to track and predict the path of the robot along wind & water currents.
The final challenge for this project is ensuring straightforward implementation. This robot leverages a combination of existing technologies. For instance, algae detection using machine learning is already utilized in robots that monitor harmful algal blooms (HABs). Similarly, automatic sail and rudder controls, which are common in modern ships, can optimize energy-efficient movement. Numerous organizations, such as Blue-Green Algae, Red Tide, and AECOM, along with various technologies and research initiatives, are actively working to inhibit algae growth. The goal of this project is to integrate and optimize these technologies and strategies to effectively reduce harmful algal blooms. By combining the expertise of educators (to guide students like me), organizations (to fund initiatives), and innovators (to address the issue incrementally), we can substantially mitigate harmful algal blooms.
Expected Impact
The robot is expected to reduce harmful algal blooms (HABs) by around 40-50% within a month, depending on the size of the lake and the density of the bloom. Ultrasonic waves, known to be about 60-70% effective in rupturing algae cells, combined with oxygen diffusion, could significantly slow algae growth. The robot's coverage rate—approximately 5-10 square kilometres per day—means it could traverse an average-sized lake in 2-3 weeks, allowing for effective early intervention. While the upfront cost of each robot might be substantial, around $5000-$7000, the long-term benefits in preventing costly HAB-related damage, which can run into millions of dollars, make it a valuable investment. This estimate is based on current rates of the sensors, materials, and their effectiveness. Finally, it would affect people depending on their location. In Canada, lakes and fishing are a substantial part of our economy and support many livelihoods. So, if algae continue to grow exponentially and faster, then many livelihoods would be lost, which is why this robot would significantly help when paired properly with other methods. Similarly, other robots or projects like Team Seas' plastic collection robots, and Paris' cleanation of their rivers for the Olympics have helped the local communities and people. Thus, this robot would also have a huge positive impact on local lake-dependent communities (and even companies which distribute to far away communities as well). While I believe that this robot needs improvement, I think the idea and motive are what is truly important. I hope to help people and the environment through my projects like this robot.
Built With
- arduino
- habsos-datatset
- machine-learning
- opencv
- python
- would-use:
Log in or sign up for Devpost to join the conversation.