Inspiration
Finding Screws is a story of a team of first year students who were literally struggling to find the screws to build a robot. Desiring a new opportunity, the team decided to put together their skills to build this project.
What it does
The robot is designed to perform two assignments
Summitting Green For this task, the robot pushes its limits by climbing to the top of a summit. Following reaching the top, the robot looks for its beloved toy, a ball. Once found, it takes it and scores it, before then climbing down the mountain along the path.
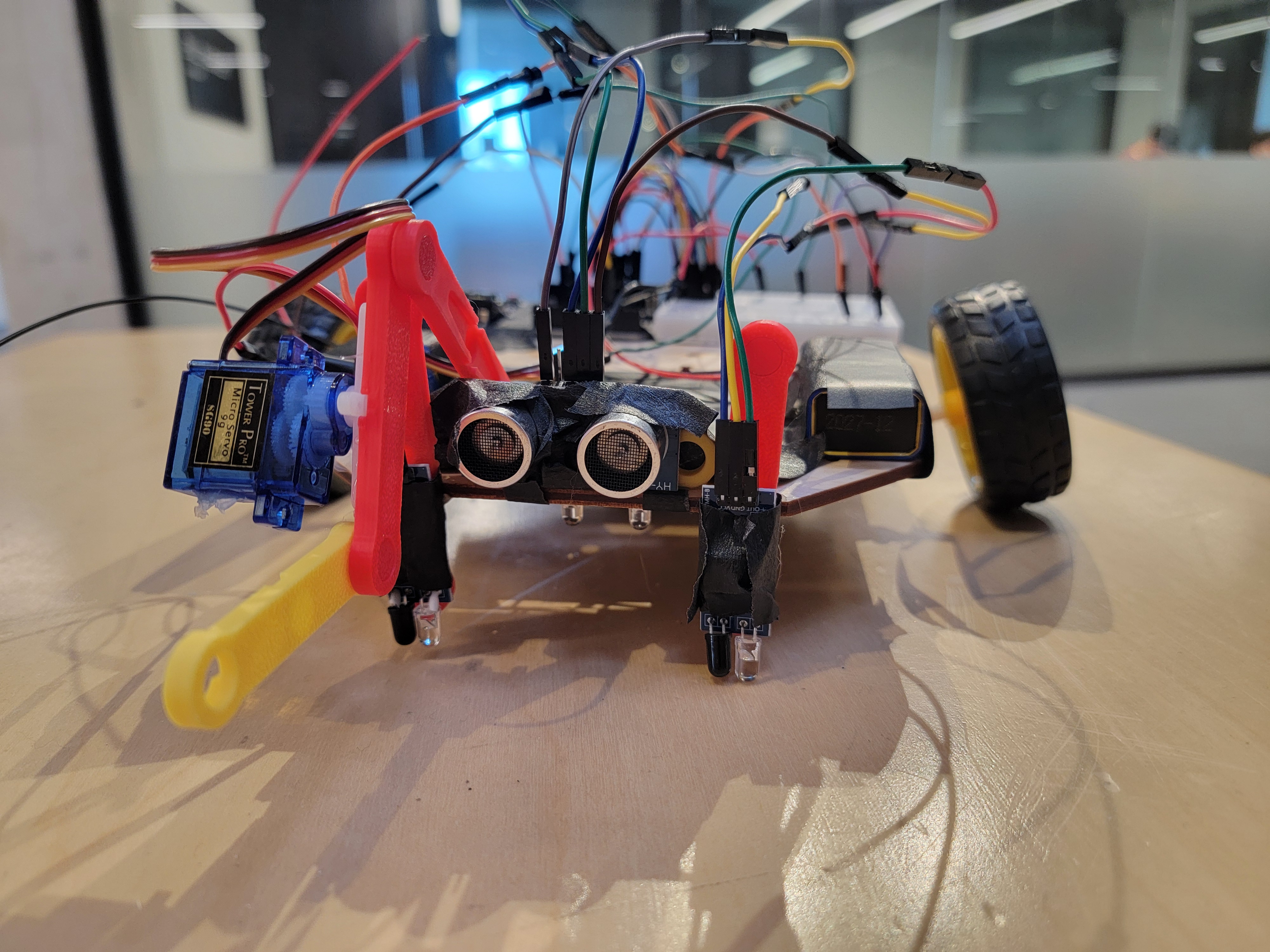
Navigating Red Things can always get in our way, and that includes our robot. The robot tracks a red path and goes from start to finish while carrying an object. However, the robot must go around two obstacles set arbitrarily on the route. Obstacles are detected using an ultrasonic range finder, and the code is designed to go around it. Otherwise, the robot must remain on the path, and the color sensor ensures that the red can be adequately detected.
Personal Reflection
We were exposed to various sensors and equipment we have not thoroughly used before, and the materials constraints were often difficult to navigate. However, this challenged our ability to think outside the box in terms of the sequence of steps and the positioning of components on the board. Furthermore, we are proud of our ability to connect, design, and operate various sensors, enabling the robot to follow along a line to reach a destination.
What's next for Finding Screws?
As a next step, we want to take our robot outside of a control environment and make it navigate between any two points. Using data collected from more sensors, this would enable the robot to handle more unexpected obstacles and difficulties. This can be used in different applications, such as small autonomous vehicles.




Log in or sign up for Devpost to join the conversation.