-
Learn about landmarks on Mars
-
Plot paths optimized for either distance or KWh.

Inspiration
We’ve always been fascinated by space exploration and the incredible achievements made in understanding Mars. Tools like Google Earth let us explore our own planet in stunning detail—but what if we could do the same for Mars? Red Atlas was born from that idea: to visualize the Red Planet with real data, simulate navigation, and plan future exploration missions with an interactive, intuitive tool.
What it does
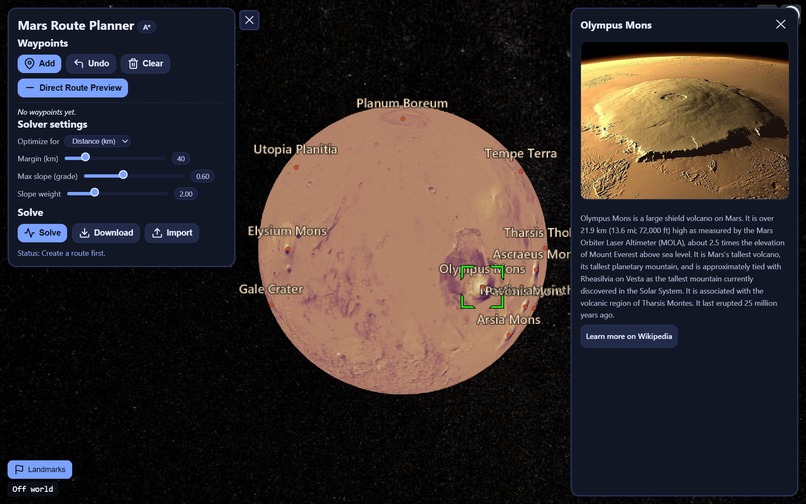
Red Atlas is a 3D Mars visualization and mission planning platform. It lets users:
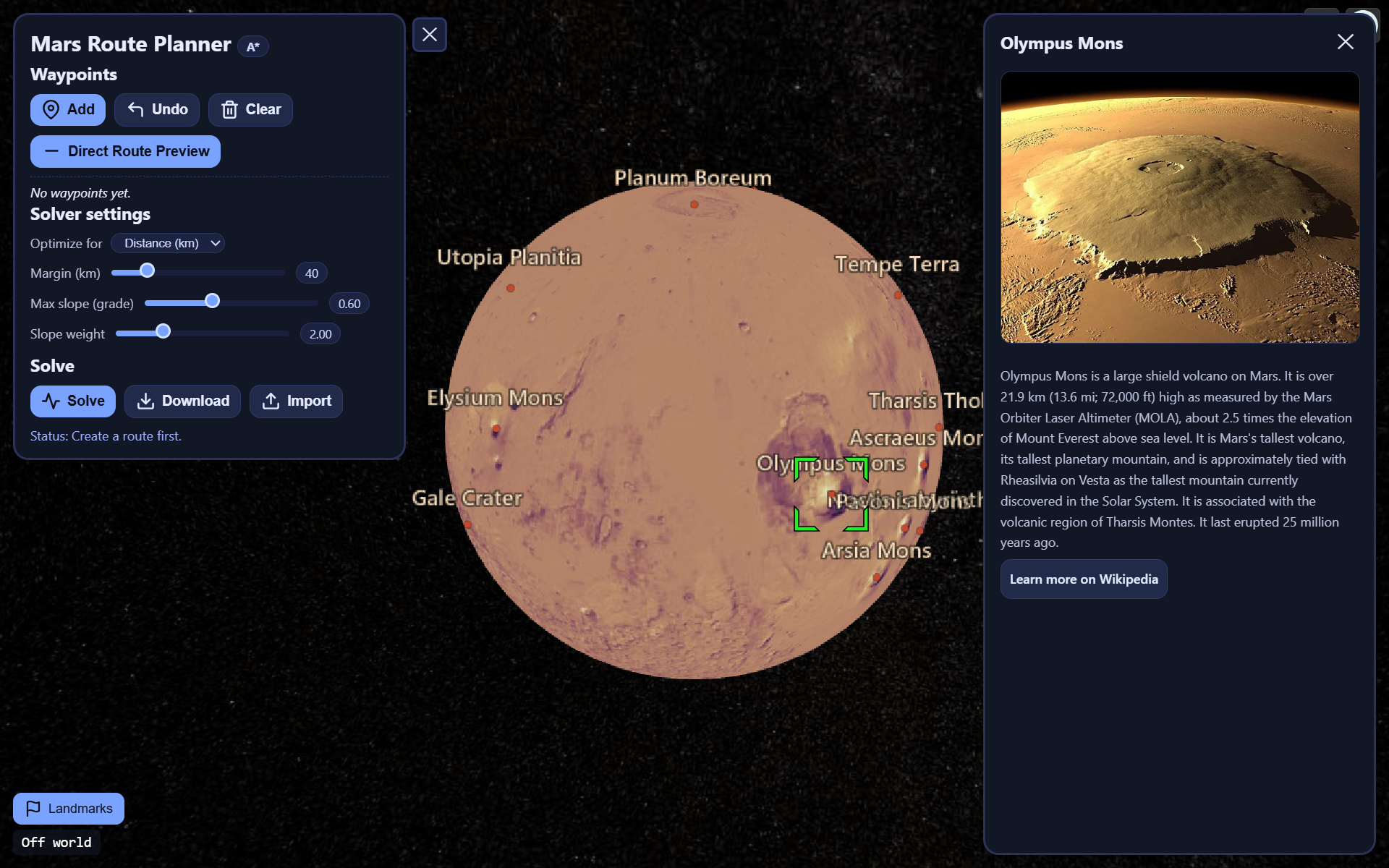
Explore Mars in full 3D with accurate topographical imagery
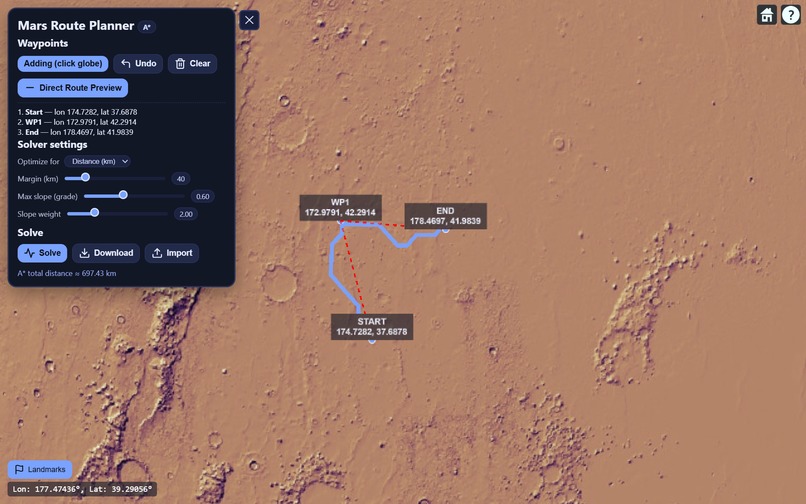
Set waypoints and create paths between multiple points on the surface
Simulate rover movement and mission routes
Switch between perspectives (global view and surface-level exploration)
View elevation profiles, distances, and travel paths for potential missions
In short, it’s like Google Earth—but for Mars, optimized for exploration, analysis, and future mission design.
How we built it
We built Red Atlas using CesiumJS for its powerful 3D globe rendering capabilities.
The base globe was adapted to use high-resolution Mars imagery and elevation data.
We used JavaScript and TypeScript for building the frontend and integrating with Cesium’s API.
Custom camera behavior and orbit animations bring the experience to life.
Waypoint mapping and route visualization were implemented using Cesium’s entity and polyline systems.
The result is a smooth, interactive globe where users can visualize, plan, and simulate exploration paths on Mars.
Challenges we ran into
Adapting Cesium to display Mars instead of Earth required replacing default imagery and tweaking lighting and color profiles for realism.
Coordinate handling and path generation over a spherical surface introduced mathematical complexity.
Performance optimization was necessary to maintain smooth rendering while animating paths and camera movements.
Accomplishments that we're proud of
Successfully transformed Cesium’s globe engine into a fully functional Mars environment.
Built a clean and intuitive mission planning system that works in real-time 3D.
Created a visually accurate and interactive experience that feels both scientific and cinematic.
What we learned
We learned how to deeply customize CesiumJS beyond its typical Earth use cases, managing imagery providers, camera controls, and global coordinate math. We also gained experience in building smooth, data-driven 3D interfaces and understanding how real-world topographical data can be visualized for exploration planning.
What's next for Red Atlas
Our next steps include:
Integrating real NASA Mars datasets (terrain, rover tracks, orbital imagery)
Adding AI path optimization for automated mission route planning
Implementing VR mode for immersive Mars exploration
Supporting collaborative mission design, allowing multiple users to plan and visualize in real time
Ultimately, we want Red Atlas to become a powerful educational and research tool, inspiring the next generation of space explorers.
Built With
- cesium
- css
- html
- javascript
- python
- vultr




Log in or sign up for Devpost to join the conversation.