-
-
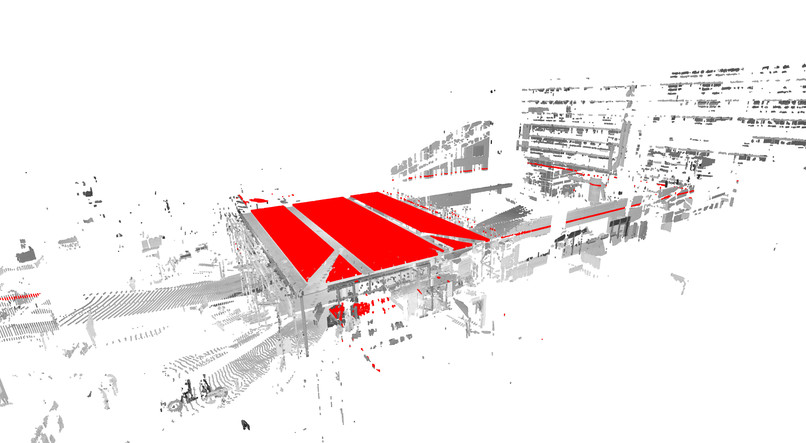
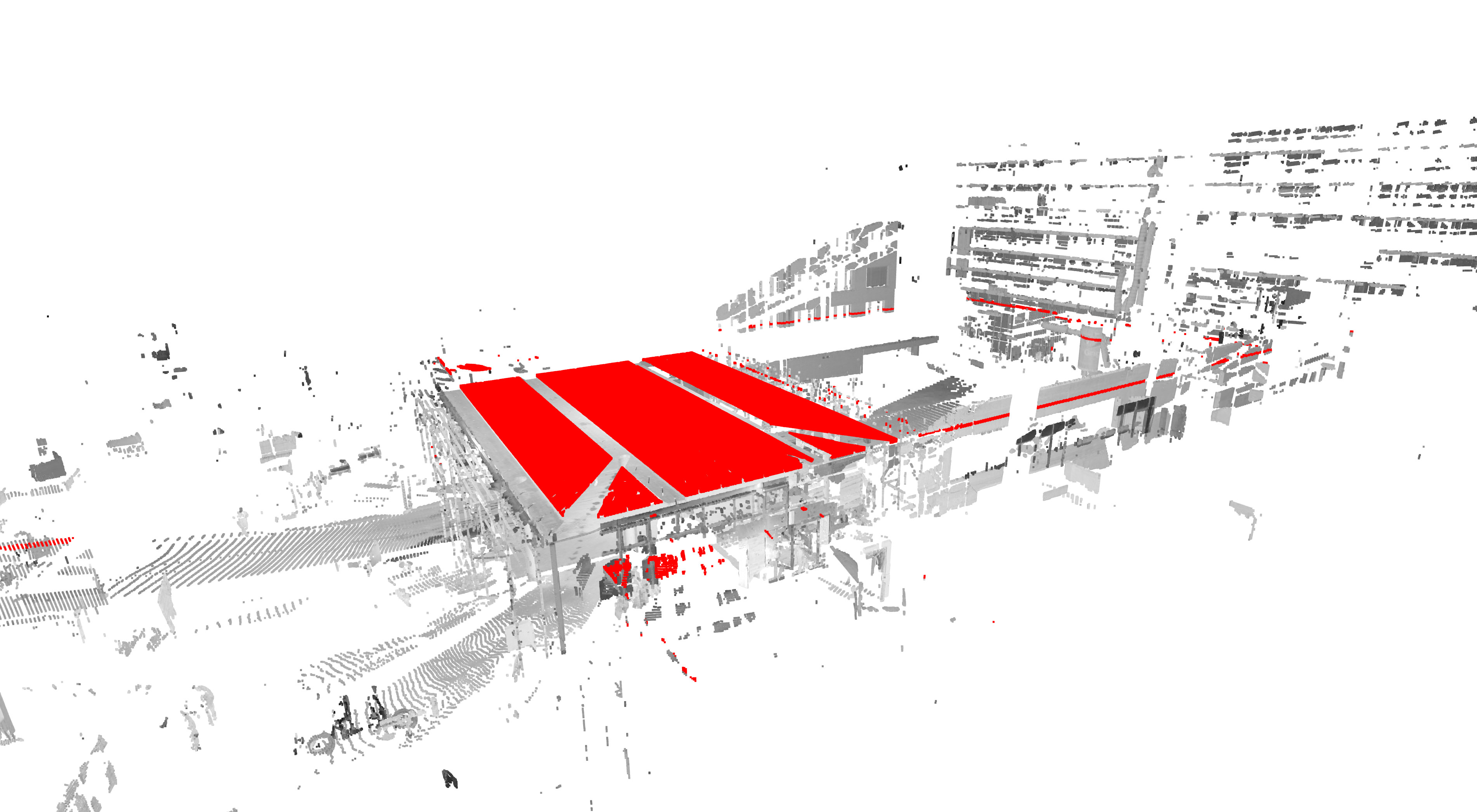
Roof segmentation
-
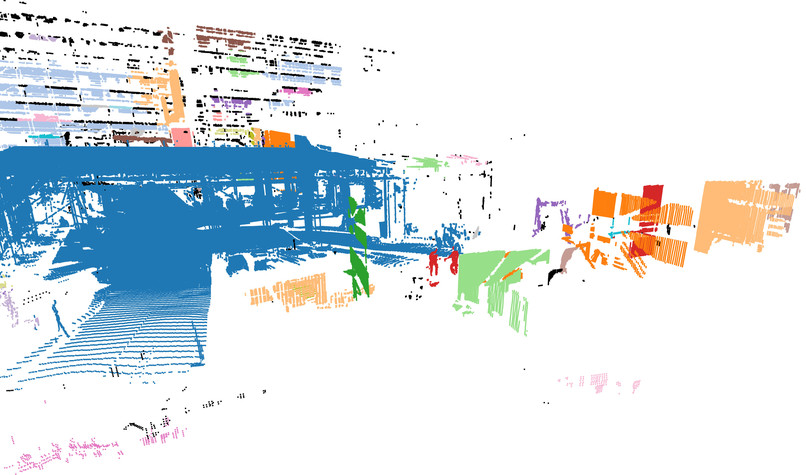
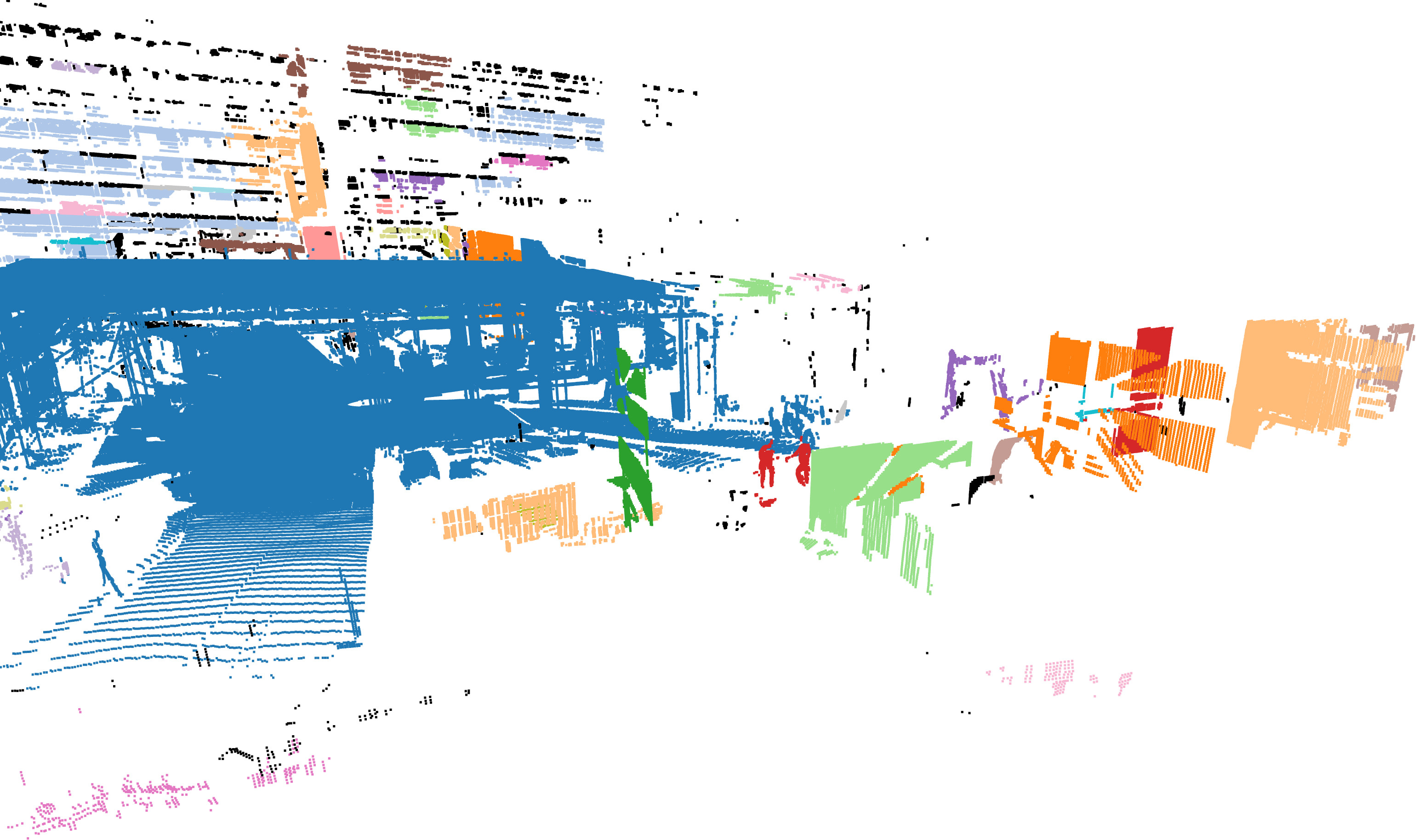
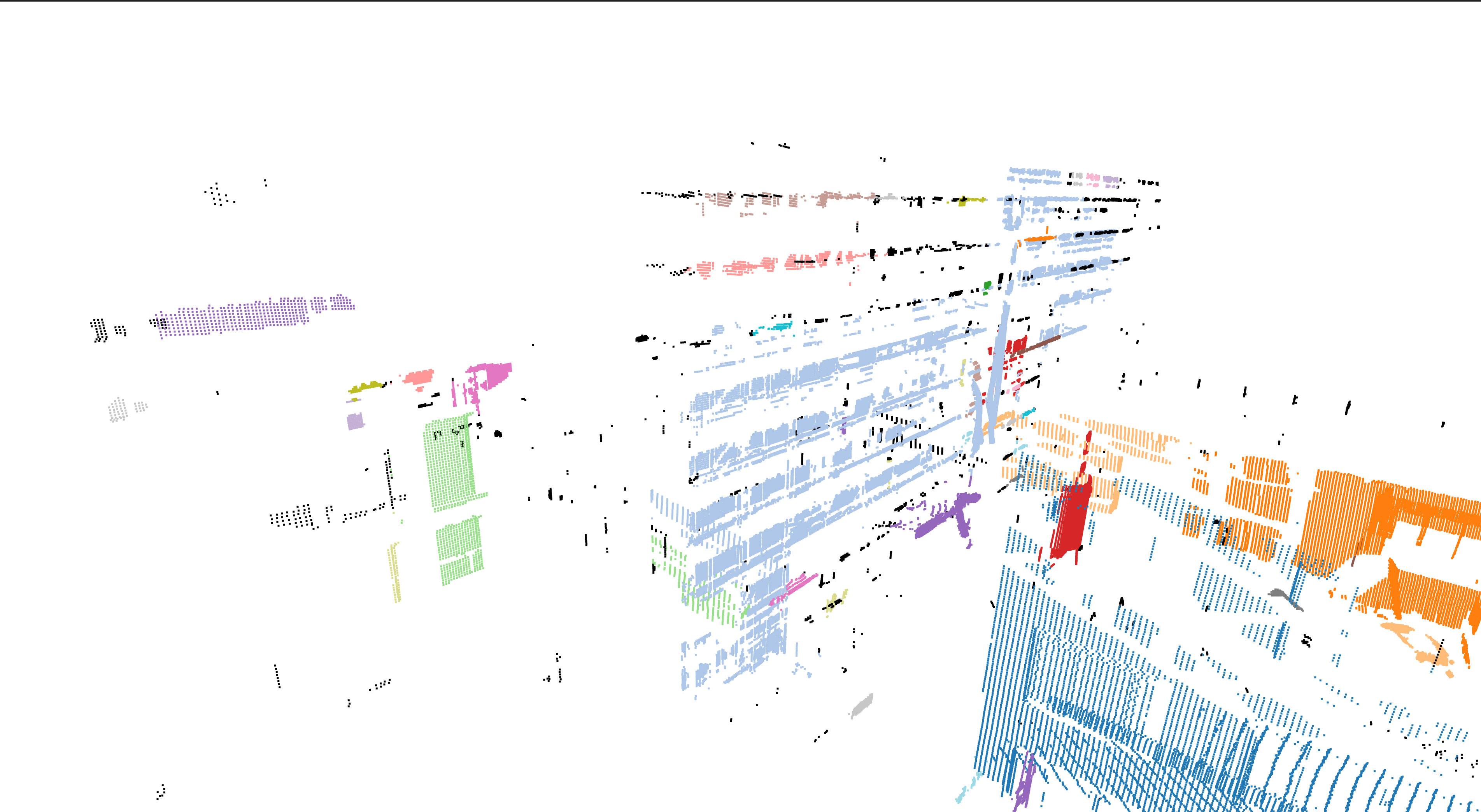
Object detection/segmentation
-
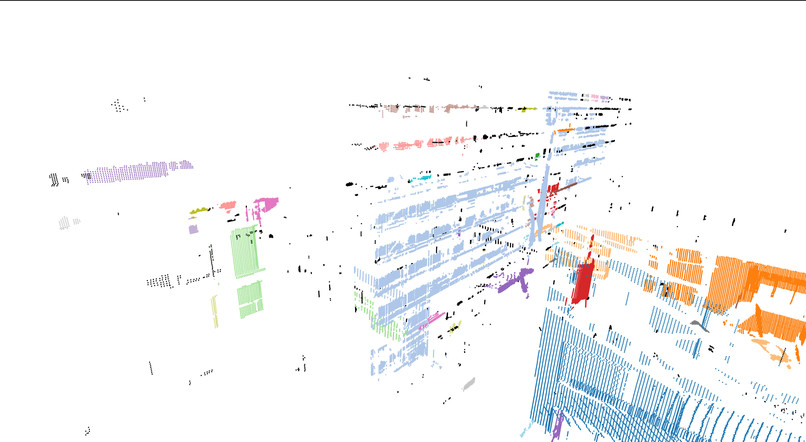
Object detection/segmentation
Inspiration
We wanted to allow for a more efficient and transparent construction process allowing the involved stakeholders to leverage their 3D laser scan and image data available by visualizing the data and allowing for change detection over time as well object detection and segmentation.
What it does
Our solution allows for efficient 3D data registration, change detection and object detection in 3D point cloud data.
How we built it
In python leveraging low level C/C++ libraries with known python interfaces to ensure scalability. We used ICP, DBSCAN, KD-Tree, Voxelization and other point cloud operations.
Challenges we ran into
3D computations are time consuming and complex.
Accomplishments that we're proud of
Our solution works and it works on a Lenovo ThinkPad P1 notebook running Fedora 32.
What we learned
The build process for large C++ Libraries can be extremely complex. Python is good for rapid prototyping but going production-ready is a different story.
What's next for BIM-boX
Deploy it as a Web API using the Reasonance Atlas platform to allow multiple stakeholders to leverage our technology. Improve segmentation, implement object classification, test with more point cloud data, validate solution and collaborate with challenge setter Faro.


Log in or sign up for Devpost to join the conversation.