-
-
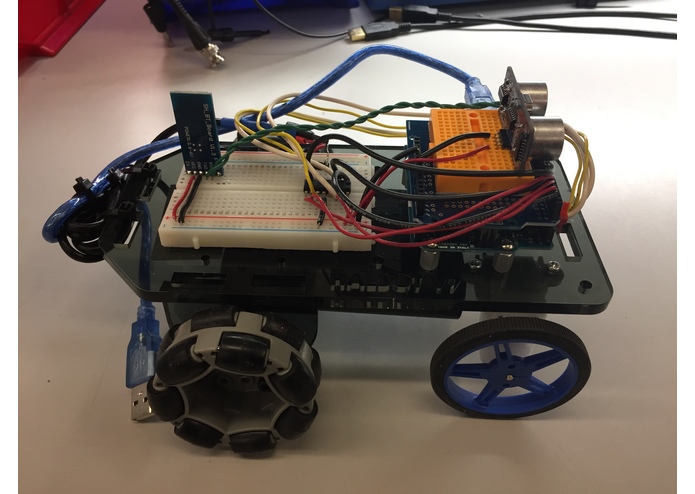
Hall Bot
-
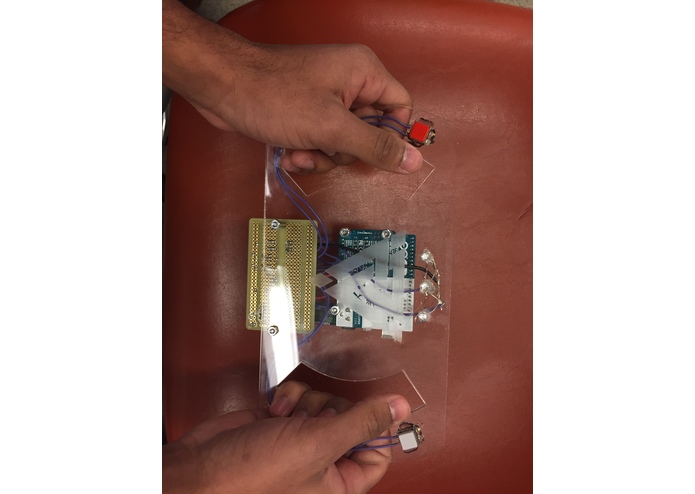
Steering Wheel
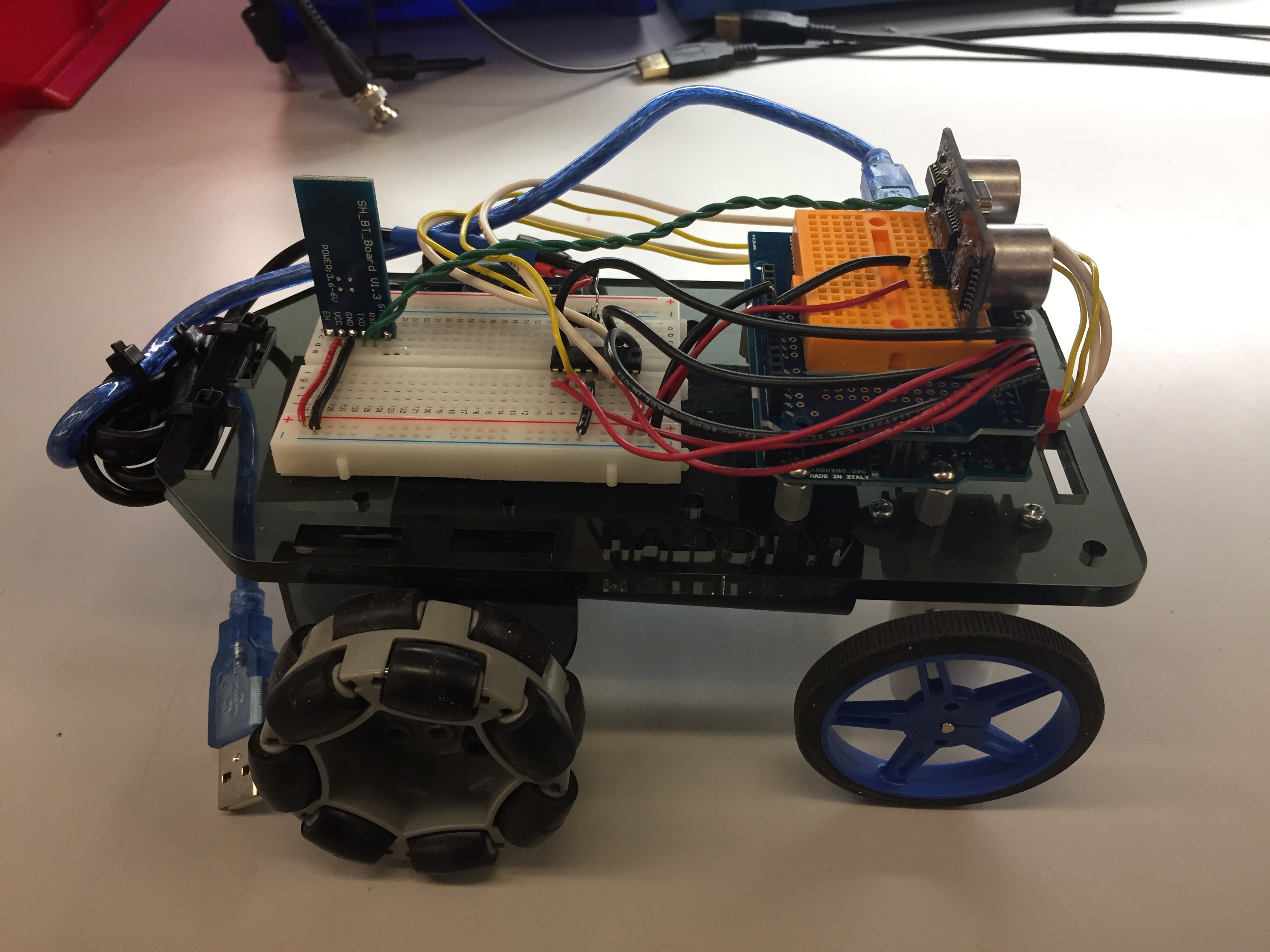
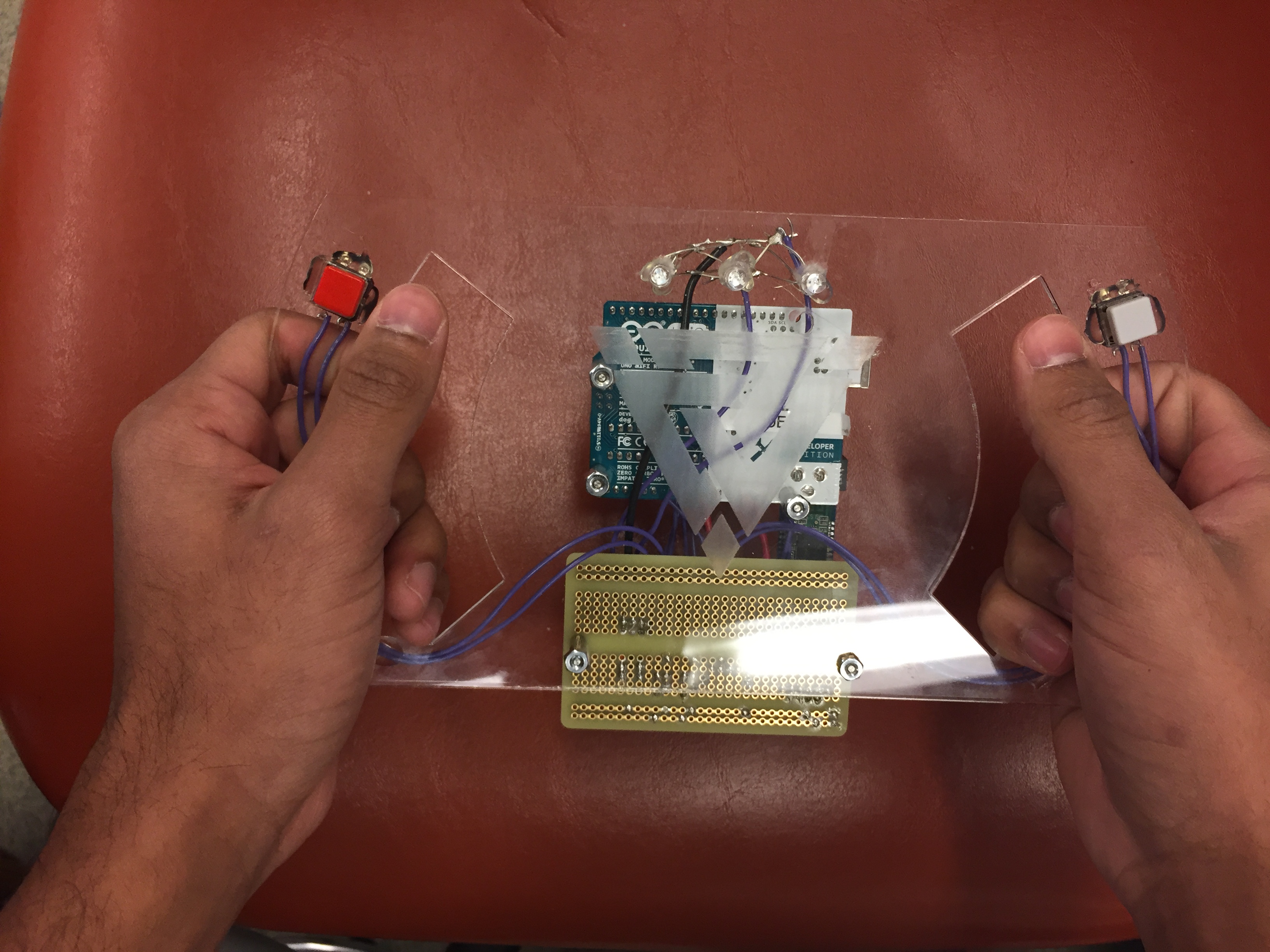
Abstract- This project will be a dual fronted approach in which we will have to design an RC car style hall bot vehicle. Once this has been designed and produced the project will shift to a focus on the controls. The current plan is to design a steering wheel with two buttons, an accelerometer, and a Bluetooth connection. The two buttons will have the control the speed of the car, changing the duty cycle, while the accelerometer will be able to sense the drivers rotation of the wheel and the Bluetooth will be able to send this information and control the steering and acceleration of the car. I think this project will be extremely fun while also incorporating the majority of the information we have learned throughout the course. Moving forward with the project, we are still looking to find a way to incorporate the Iot, but we believe once the basis of the project is done, we can add more and more details like ultrasonic sensors for vehicle safety and other cool sensors to improve performance.
Design Report Link- https://docs.google.com/document/d/1aJ0msS9SRtRMpqOoFR9RXNiIzDMhDNwNyFwWYanHsxA/edit?usp=sharing
Built With
- accelerometer
- arduino
- h-bridge
- ping-sensor
- push-buttons


Log in or sign up for Devpost to join the conversation.