Inspiration
United by our shared passion for advanced technology and inspired by the remarkable Iron Dome missile defense system, our team embarks on a collaborative journey. Comprising individuals with diverse backgrounds in Robotics and Electrical Engineering, we bring together a fusion of expertise. Despite being unfamiliar with each other initially, the challenge before us is to craft a project that not only captures our collective enthusiasm but also strikes the perfect equilibrium of complexity and feasibility. Our demanding coursework backgrounds serve as the crucible for innovation, pushing us to create something engaging yet manageable within the given time constraints.
The Iron Dome, with its awe-inspiring technological prowess, has fueled our excitement and become the beacon for our project aspirations. As avid fans of advanced tech in the forces, we are motivated to delve into the intricate world of missile defense systems. Our goal is not just to replicate, but to innovate and create a project that reflects our shared interests and showcases the incredible possibilities that emerge when diverse talents unite. In the face of this challenge, we see an opportunity to not only expand our technical prowess but also foster a collaborative spirit that transcends individual expertise. This project is more than a technological endeavor; it is a testament to the power of passion, collaboration, and the relentless pursuit of excellence.
What it does
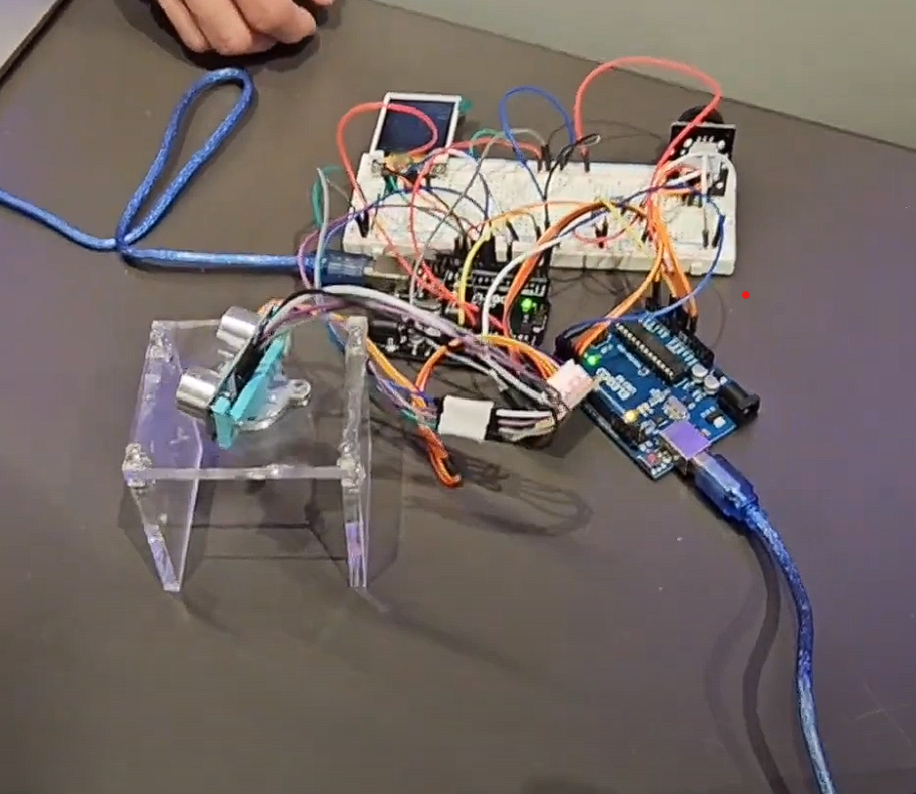
The product is designed to detect the angle and distance of an approaching object, displaying the information on a radar map akin to those found in fighter planes, ships, and submarines. It utilizes a stepper motor, which houses a rotating ultrasonic sensor spanning 360 degrees. One Atmega 328p controls the stepper motor, while another Atmega 328p manages the LCD and ultrasonic sensors. Serial communication via UART facilitates the transmission of the stepper motor's angle from one Arduino to the other. Furthermore, the ultrasonic sensor measures the distance to the object, and this angle-distance data is utilized to chart the object's location on a vibrant beautifully animated LCD. In addition there is a third Arduino which communicates with the intermediate Arduino and obtains the detected angle and this is used to lock onto the target like a missile launcher or a turret every 10 seconds. The Radar has two operation modes, one is the automatic mode and the other is the manual rotation mode for more precise control by the user. This is implemented using a joystick. In addition, the arduino communicates with the LCD module using SPI communication protocol which had to go through an overhaul from the base that was provided to us during the Pong game assignment.
How we built it
We adhered to the established V-model product development life cycle to meticulously develop and test our product. Our initial steps involved determining the allocation of devices to specific Arduino boards, considering the limited number of pins available. Subsequently, we crafted comprehensive software and hardware specifications. Incorporating feedback received during the proposal phase, we made necessary adjustments and strategically divided the project into independent units. This modular approach allowed us to work on individual components at our convenience. Rigorous testing was conducted for each unit to identify and rectify any flaws before integration. Finally, the entire system underwent comprehensive testing to ensure alignment with the specified requirements.
Challenges we ran into
Numerous challenges emerged throughout our project. Among them were encountering logical errors in the code while developing the Arduino's graphical library. Another hurdle arose from the limited number of IO pins on the Arduino, prompting us to rewrite LCD drivers to allocate sufficient IO pins and timer space for all peripheral circuits. Collaborative time management proved to be yet another obstacle as we had other courses which were workload heavy. Additionally, ensuring the seamless integration of the LCD and timer without the LCD delay impacting the timer count posed a significant challenge. Moreover, we faced the task of retrieving the complete 2 bytes of data from UART before it was utilized by the LCD.
Accomplishments that we're proud of
We take pride in showcasing our adept coordination and time management skills, which enabled us to successfully complete the project within the designated timeframe. Notably, this accomplishment was achieved amidst the challenges of balancing concurrent assignments and projects. Our ability to navigate through complex tasks, maintain effective communication, and strategically allocate our time resources speaks to the commitment and resilience of our team. This project stands as a testament to our collective dedication and capability to meet deadlines while upholding the standards of excellence in our work. The proficiency we gained in adapting code based on the datasheet of any microcontroller and writing C code relatively easily and thinking logically and planning to allocate the limited number of peripheral circuits and memory of a microcontroller to use it to effectively is also something we are proud of.
What we learned
Throughout this project, we delved deeply into the intricacies of LCD firmware and graphics libraries, extensively rewriting them to seamlessly integrate peripheral devices. The development of the UART library from scratch provided us with a comprehensive understanding of serial communication, enhancing our proficiency in this critical aspect. Our exploration expanded to encompass various types of motors, gaining comprehensive insights into their applications and operational mechanisms.
Beyond technical skills, the project served as a rich learning experience in product development life cycle methodologies. We absorbed valuable lessons in the intricacies of coordinating and working within a team, cultivating essential skills in effective time management. Additionally, the iterative process of feedback-based adaptation played a pivotal role in refining our approach and ensuring the project's success. This holistic learning journey not only enriched our technical knowledge but also honed our collaborative and adaptive capacities, laying a strong foundation for future endeavors.
What's next for the project
Enhancements to the project in ESE5160 could involve advancing its capabilities by implementing cloud-based data transmission to a remote board, allowing for precise targeting from a remote location. Furthermore, leveraging data analytics, the system could analyze patterns of foreign objects, enabling the prediction of potential threats. Taking innovation a step further, the integration of a Real-Time Operating System (RTOS) could transform the stepper motor into a dual-functionality system, functioning both as a RADAR and a missile launcher. This augmentation would elevate the project into the realm of hard real-time embedded systems, presenting an exciting prospect for extended functionality and heightened performance.

Log in or sign up for Devpost to join the conversation.