-
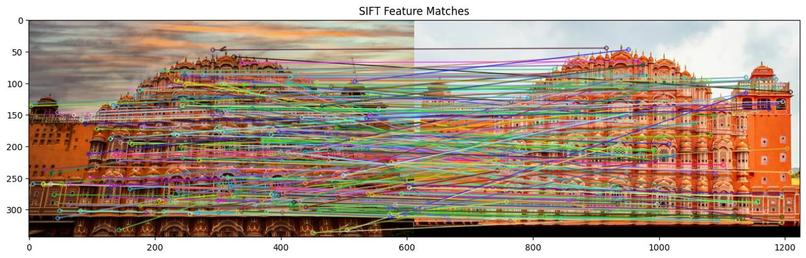
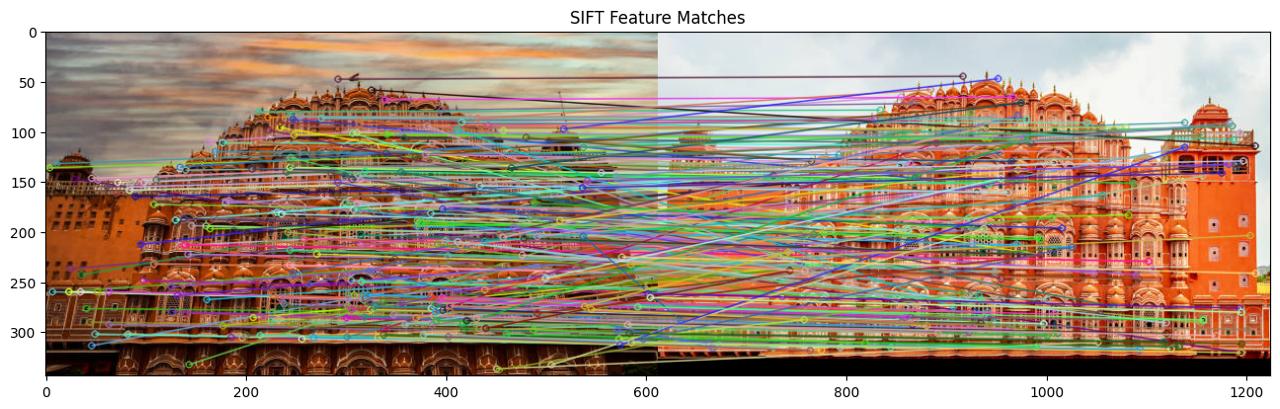
SIFT and RANSAC used for feature extraction, feature mapping using brute force matcher and Lowe's Ratio Test
-
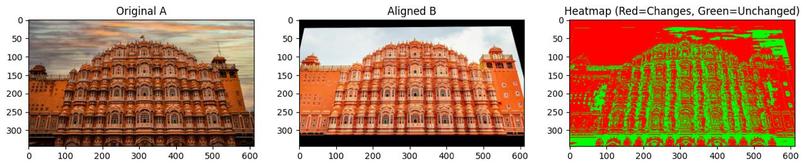
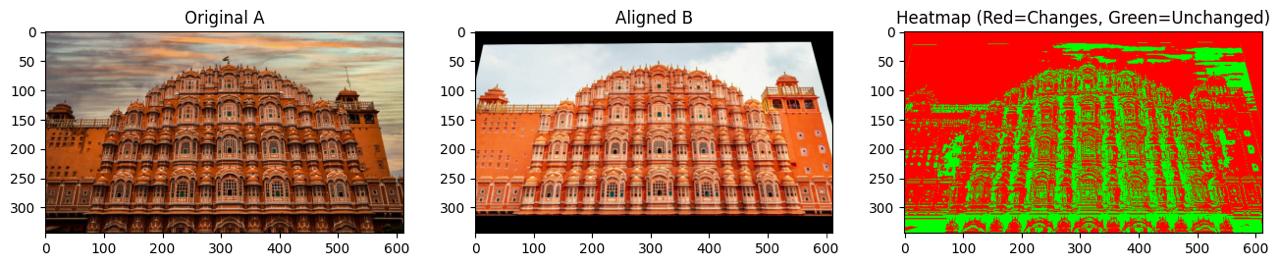
Image Aligned using RANSAC (homography estimation)
-
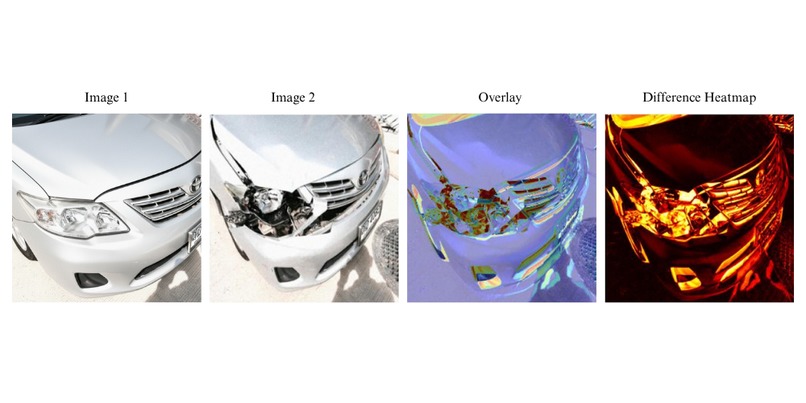
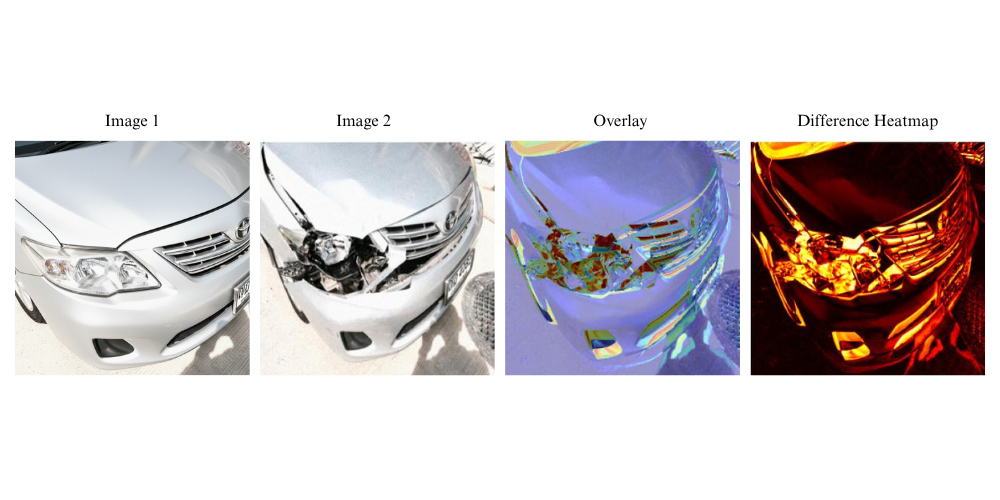
heatmap generation using pixel absolute difference and threshold mapping using pre and post image overlay
-
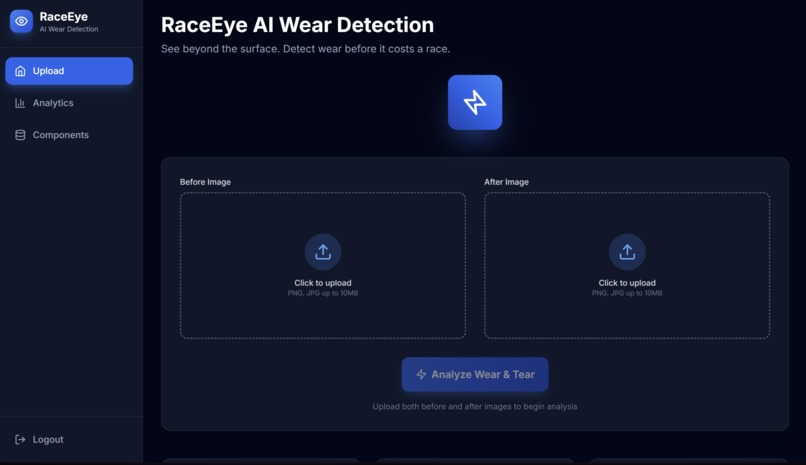
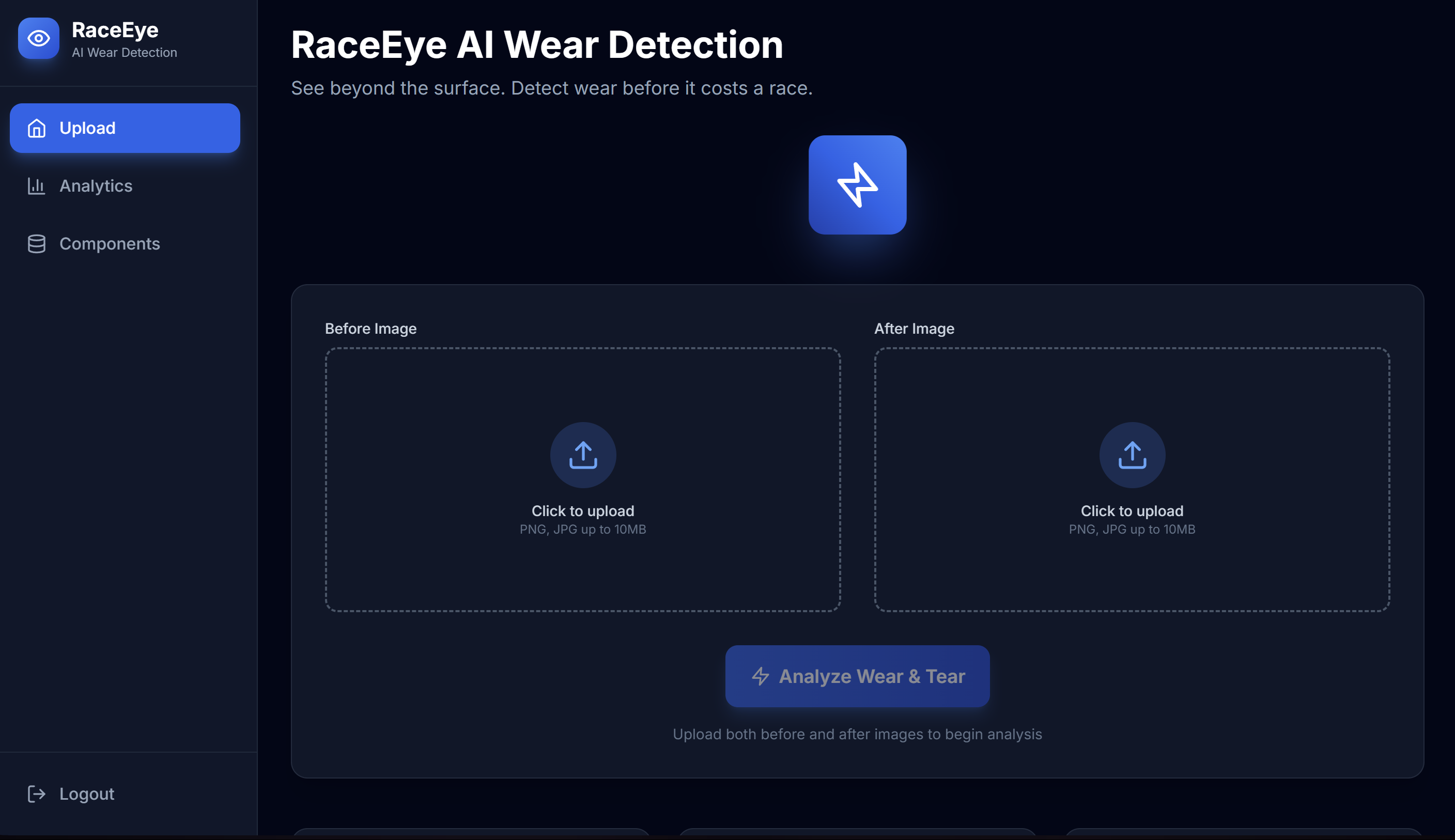
Dashboard for inputting images
-
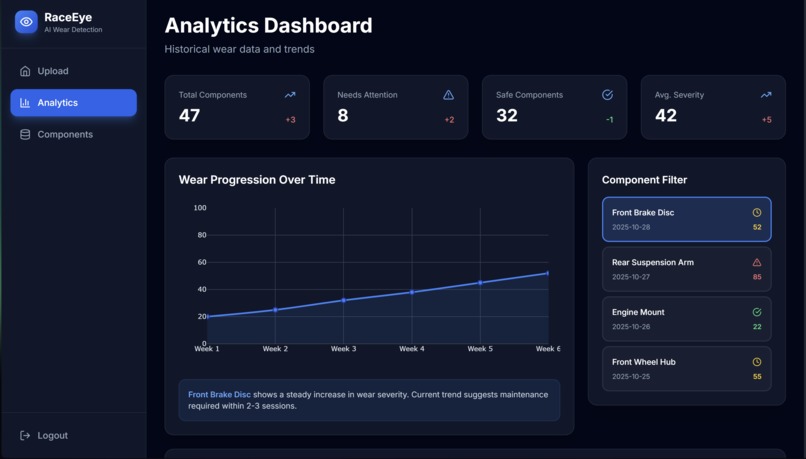
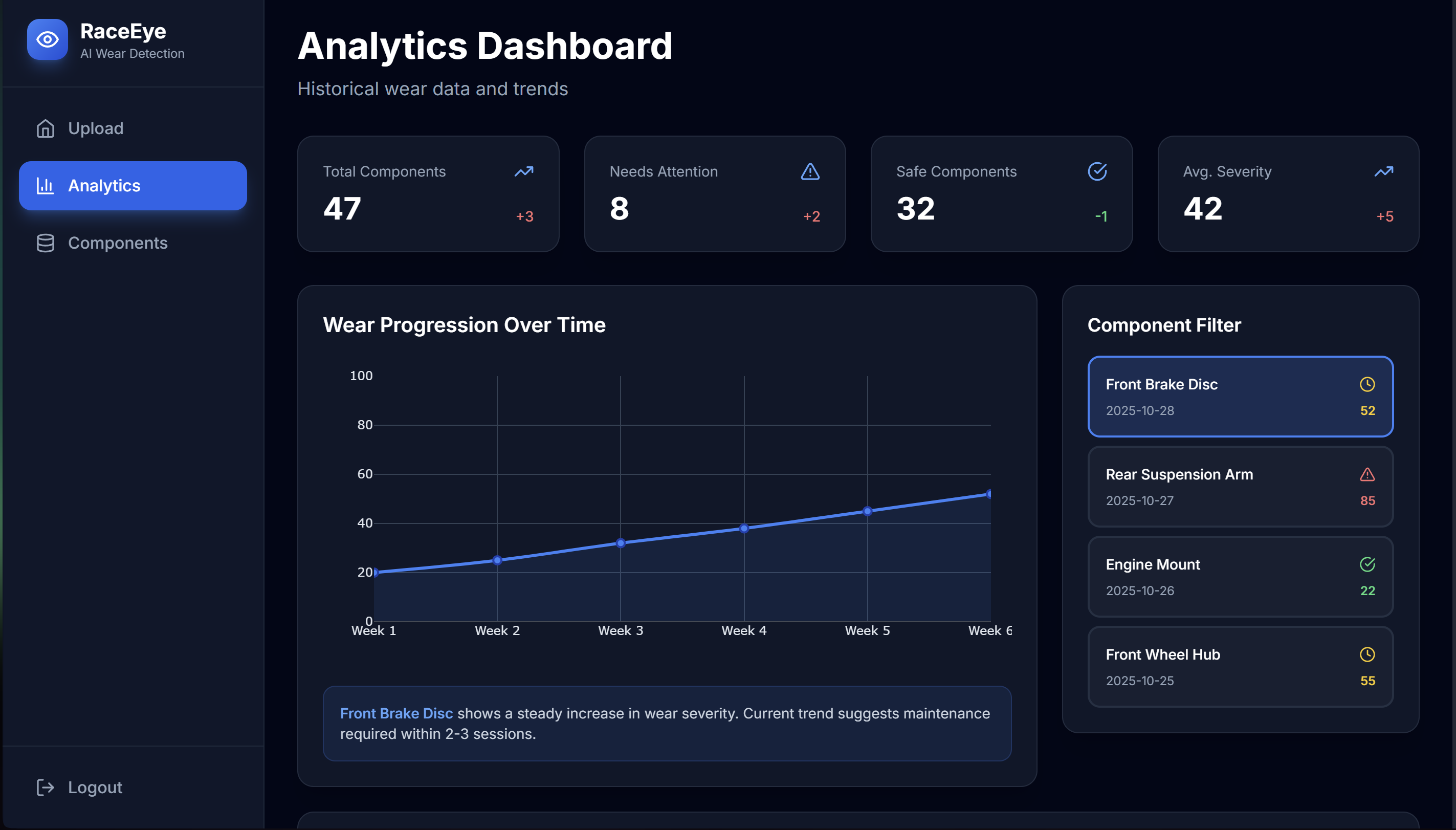
Complete analysis of past breakdowns
-
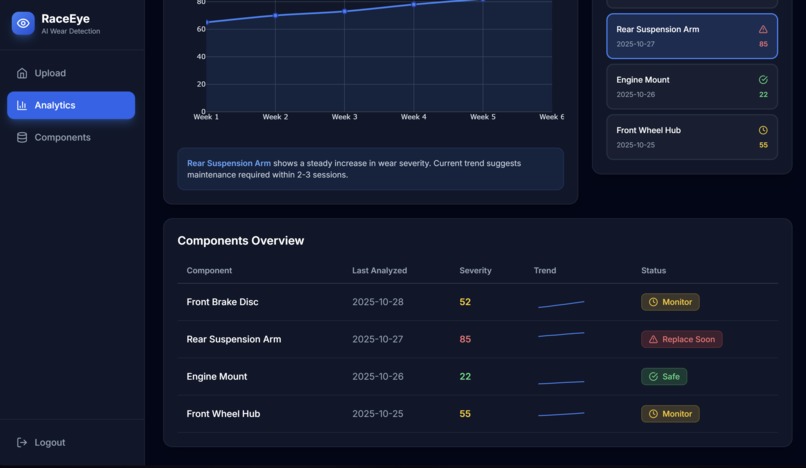
Severity Report of past breakdowns
-
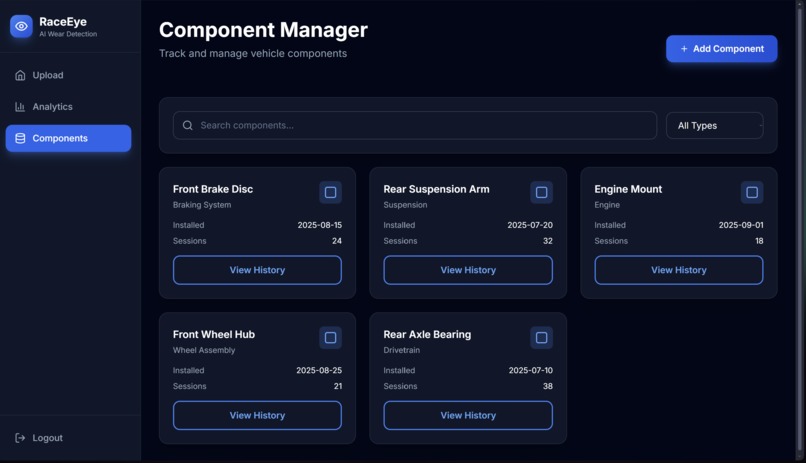
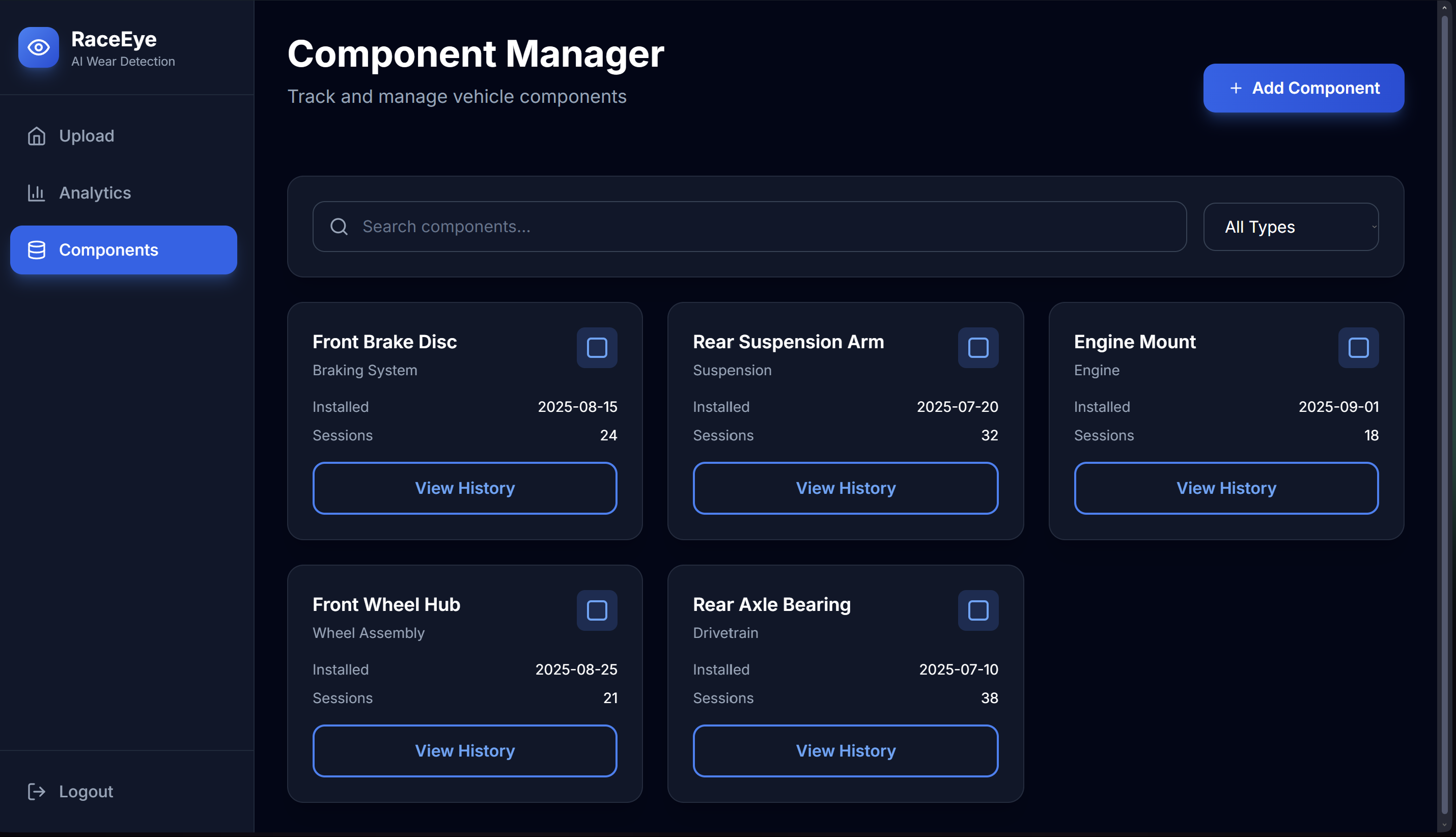
Maintained history of stored component
-
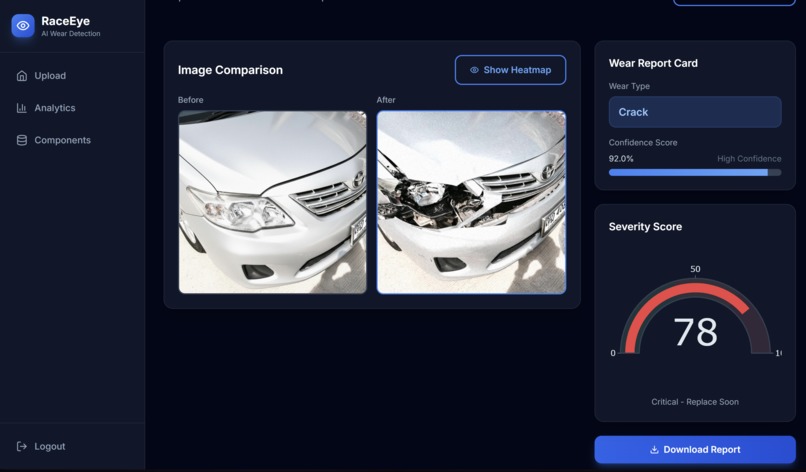
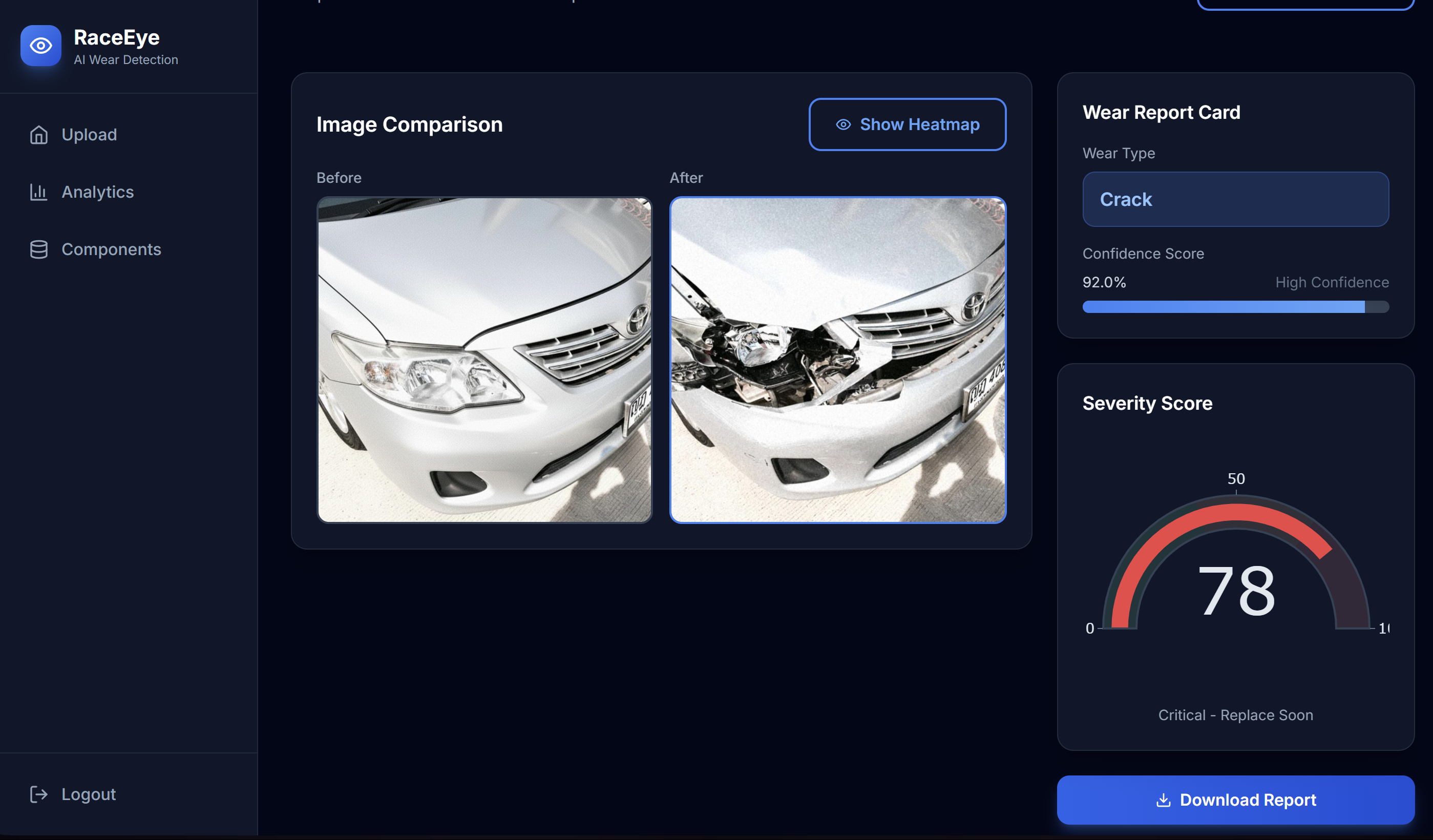
Report generation, reporting confidence score and severity

Inspiration
We wanted to create a system that could compare two images and detect subtle differences between them — something that’s extremely useful in areas like quality inspection, forgery detection, image registration, and computer vision-based change tracking.
The goal was to not just compute pixel-level differences but to understand structural, geometric, and perceptual variations between two similar images.
What it does
Our solution takes in two input images and performs:
- SIFT-based keypoint detection to find unique visual features.
- RANSAC-based homography estimation to align both images, handling translation, rotation, and scale changes.
- Background removal (via rembg) to eliminate irrelevant regions before comparison.
- Feature matching visualization with confidence lines drawn between keypoints.
- Difference heatmap generation that highlights only meaningful differences after alignment.
- Quantitative metrics including:
- Structural Similarity Index (SSIM)
- MSE (Mean Squared Error)
- Feature Match Count and Confidence
The output consists of:
imgA→ Original ImagealignedB→ Aligned Target Imageheatmap_img→ Difference Heatmapmatches_img→ Feature Matching Visualizationsimilarity_score,mse, andconfidence_scoreas numeric metrics
How we built it
We used a multi-stage computer vision pipeline built in Python with OpenCV, NumPy, scikit-image, and rembg.
Steps involved:
- Preprocessing: Both images are resized and normalized.
- Feature Extraction:
Used SIFT (Scale-Invariant Feature Transform) to detect local descriptors invariant to scale, orientation, and illumination. - Feature Matching:
Used a FLANN (Fast Library for Approximate Nearest Neighbors) matcher to find the best correspondences between keypoints.
Applied Lowe’s Ratio Test to remove ambiguous matches. - Homography Estimation:
Computed a 3×3 transformation matrix using RANSAC (Random Sample Consensus) to eliminate outliers and align the second image with the first. - Background Removal:
Applied rembg (U²-Net) to strip backgrounds before alignment for cleaner comparison. - Difference Heatmap:
Computed pixel-wise differences and visualized them with a colormap for interpretability. - Metric Computation:
SSIM for perceptual similarity,
MSE for pixel-level deviation,
Match ratio as a proxy for confidence.
Challenges we ran into
- Handling scale and rotation variations between images during alignment.
- Managing edge mismatches after background removal.
- Ensuring the heatmap wasn’t too sensitive to lighting changes or shadows.
- Debugging OpenCV’s findHomography failures when keypoints were insufficient.
Accomplishments that we're proud of
- Successfully combined SIFT + RANSAC + rembg in a single robust pipeline.
- Created both qualitative (visual) and quantitative (metric-based) deliverables.
- Made the program modular so that it can easily plug into a Flask or React web interface.
- Achieved near-perfect alignment and high-confidence similarity scoring even for noisy inputs.
What we learned
- The importance of feature-based registration over pixel-based comparison.
- How RANSAC dramatically improves robustness by filtering noisy matches.
- How to compute and interpret SSIM, MSE, and confidence metrics for real-world vision tasks.
- Best practices in OpenCV pipeline structuring for production-grade image comparison tools.
What's next for Untitled
We plan to:
- Integrate this pipeline into a web dashboard for drag-and-drop image comparison.
- Add deep feature extraction using VGG/ResNet embeddings for semantic-level difference detection.
- Implement auto-report generation (PDF with metrics + visuals).
- Extend to video frame comparison for surveillance and defect detection use cases.




Log in or sign up for Devpost to join the conversation.