
Inspiration
We were inspired by the recent Artemis mission to explore a project that incorporated space travel. All of our members have a fascination with rocketry and space programs, and felt that working with that in mind would lead to the best possible project. From there, our brainstorming naturally led to a rover with the capacity to walk, as uneven terrain is an inevitability of space.
What it does
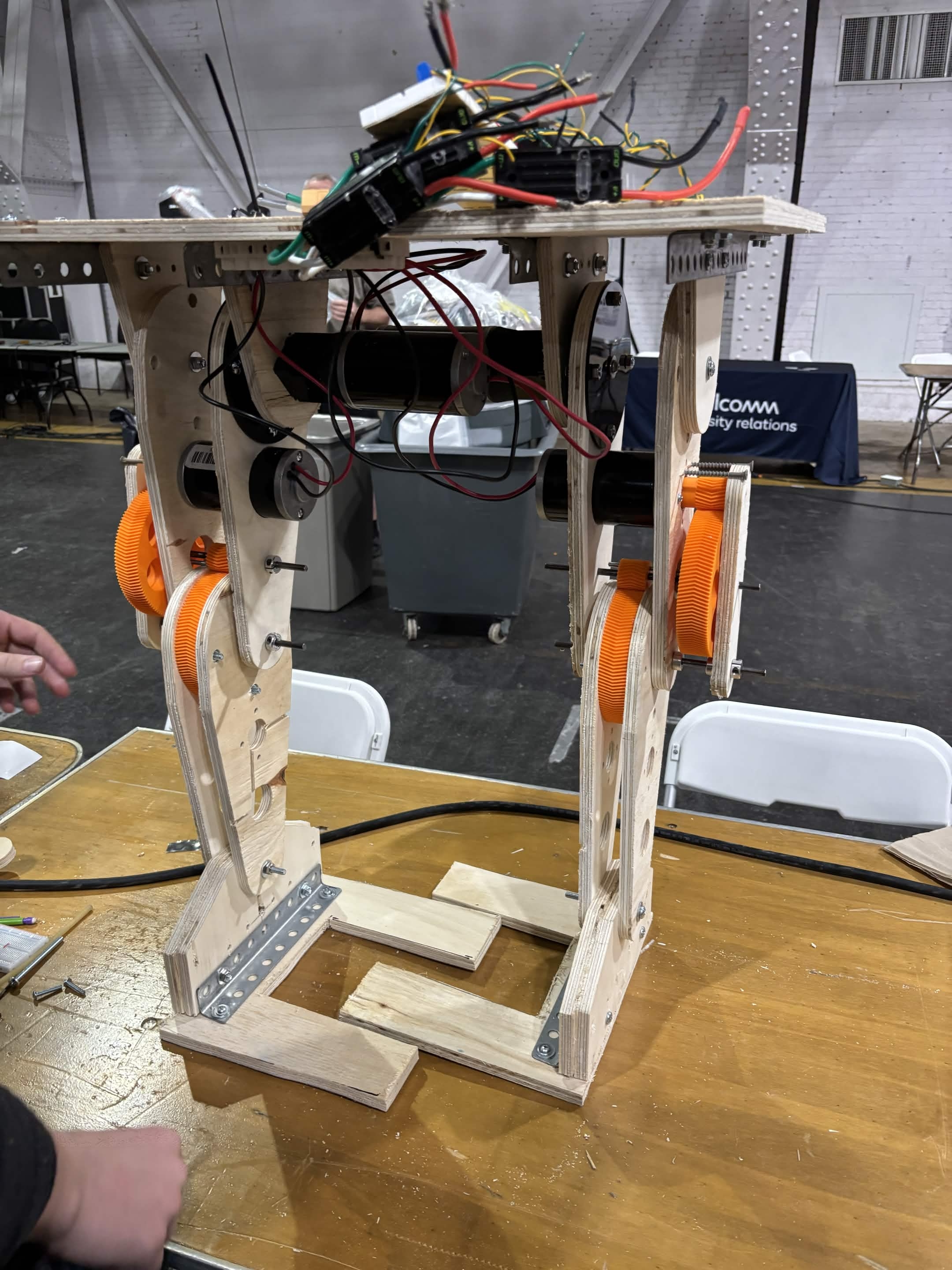
The robot has the capacity to switch between walking and roving. This allows it to traverse a wide variety of terrain. The value of this is clear in space exploration. The goal of this is to create a versatile tool to traverse uneven terrain.
How we built it
We planned out the components carefully with CAD software, making sure that everything fit into each other. We had the inspiration to rout wood for our components, given its versatility. We took a very modular approach, building all of the individual components up and assembling them to form a robust whole.
Challenges we ran into
We struggled with planning and orientation-sensing. We had magnetic encoders ready to go for this event, but unfortunately, we had some issues with our planning and ended up unable to mount it as we had intended.
Accomplishments that we're proud of
We are proud that we were able to build a passively stable robot that can very nearly walk. A day and a half to prototype a rover-walker type robot is unprecedented, and our capacity to achieve that is a marker that we can push innovation in this area.
What we learned
We learned a lot about the importance of planning, further forethought, and the criticality of software. All of these presented huge challenges during the assembly and led to us having to make a lot of last-minute improvisations.
What's next for R3D3
We'd love to flesh out the robot and make sure we have the full depth of functionality we planned. Past that, we would love to contribute to innovation and build a larger, more realistic walker-rover.
Built With
- arduino
- cad
- microcontrollers
- onshape
- pi
- raspberry-pi
- ros
- ultimaker

Log in or sign up for Devpost to join the conversation.