-
-
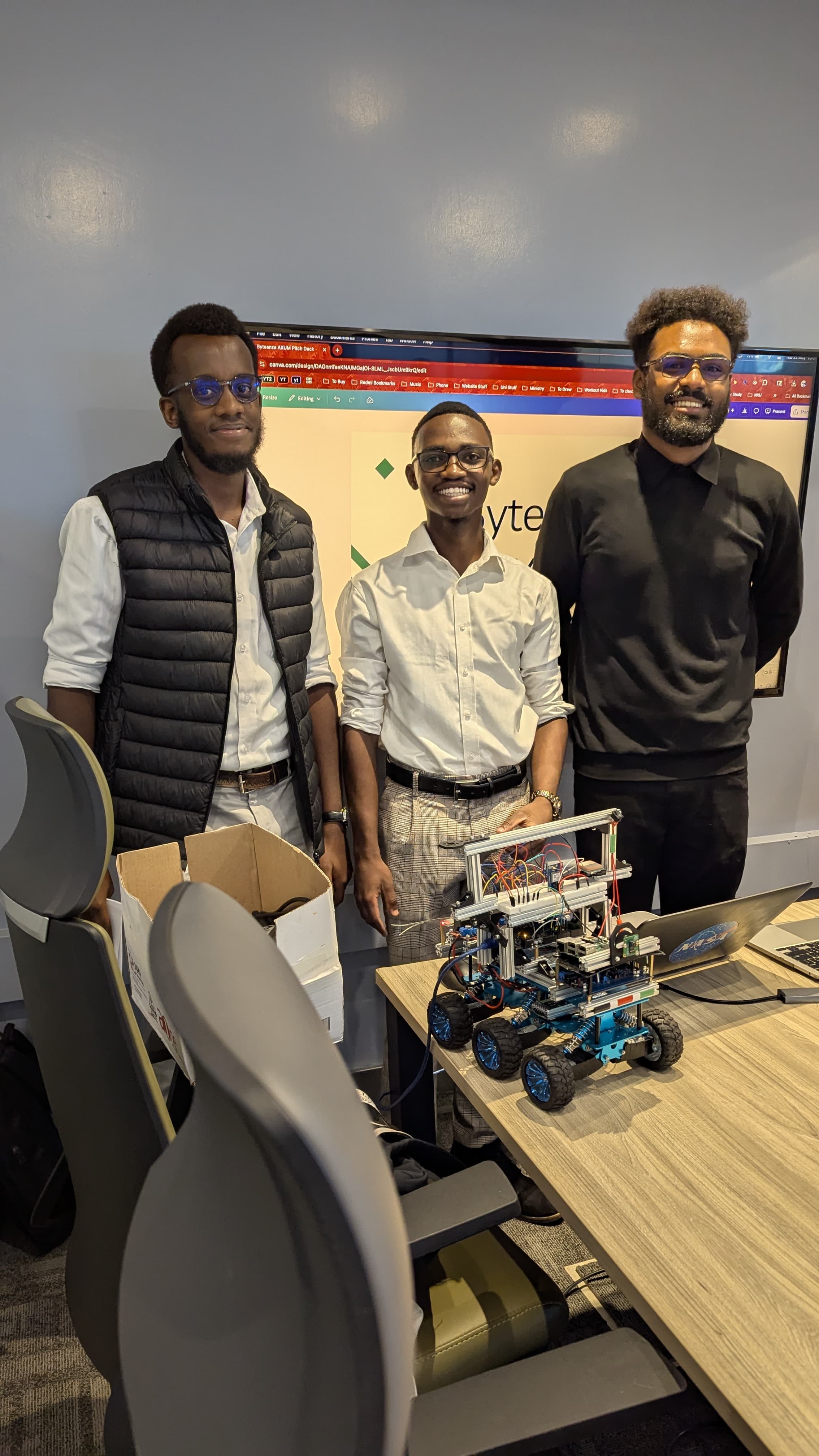
Before a RANGER pitch at Axum Earth.
-

Geiger Muller Tube
-
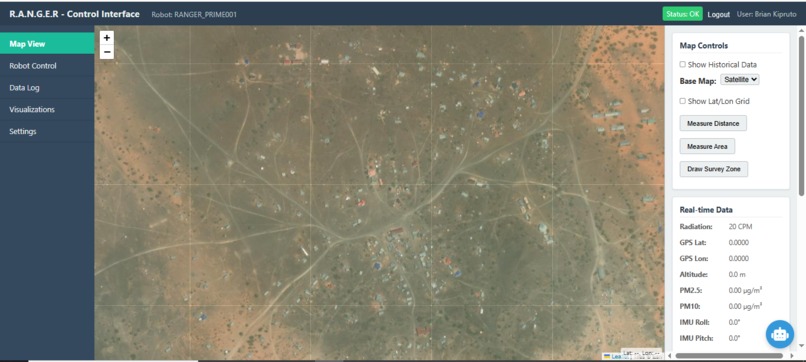
Live Satellite View. Kargi area
-
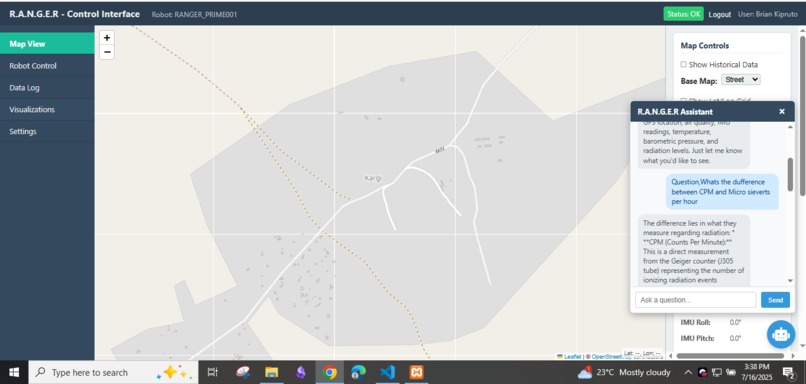
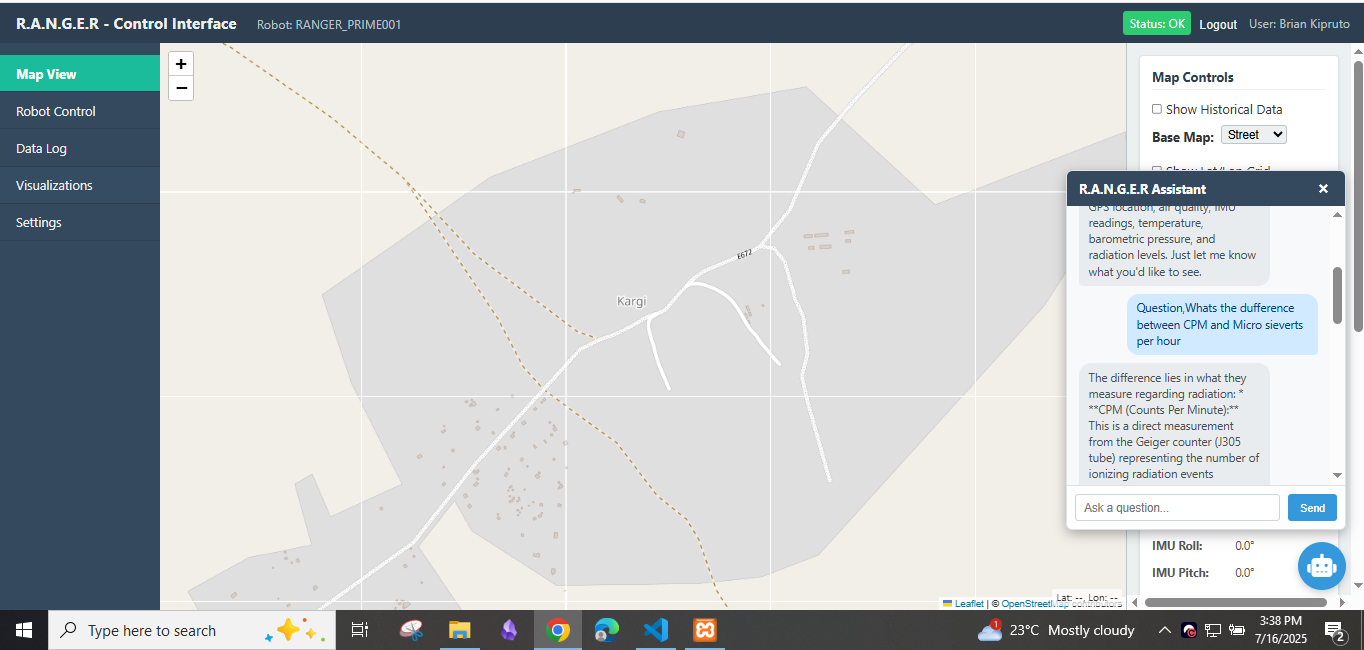
RANGER AI Assistant
-
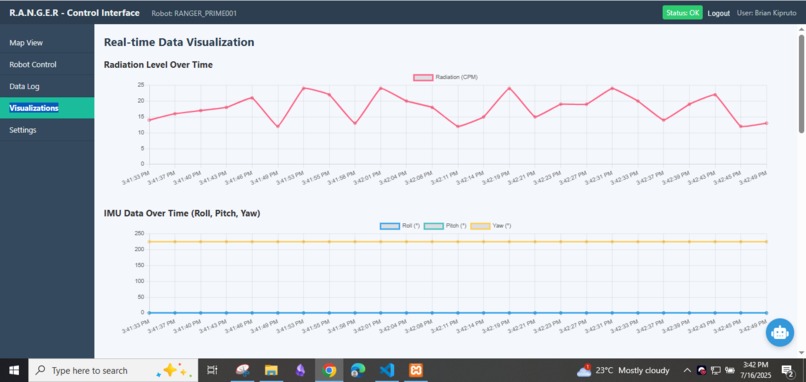
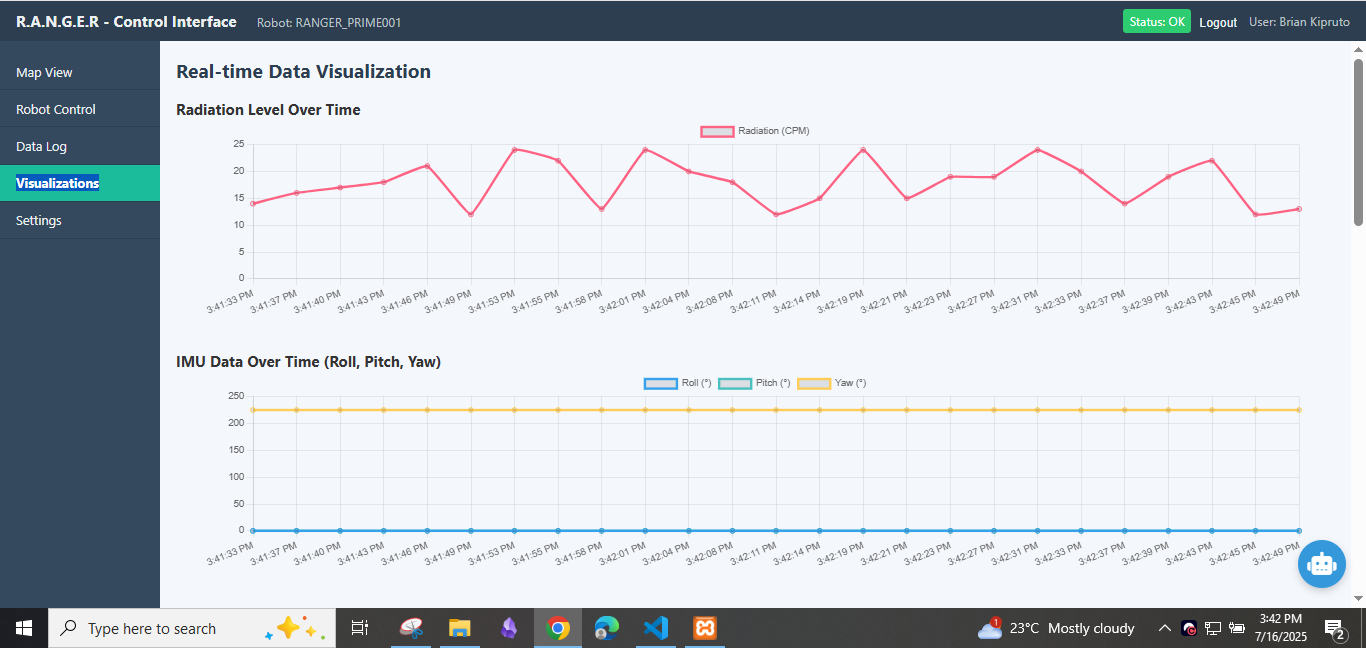
Live Data Visualization
-
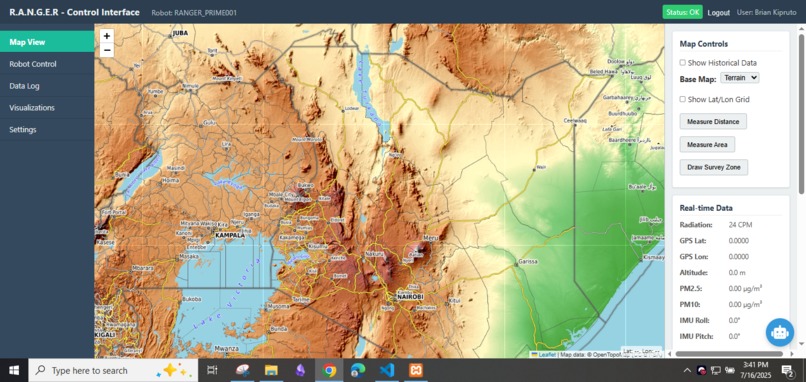
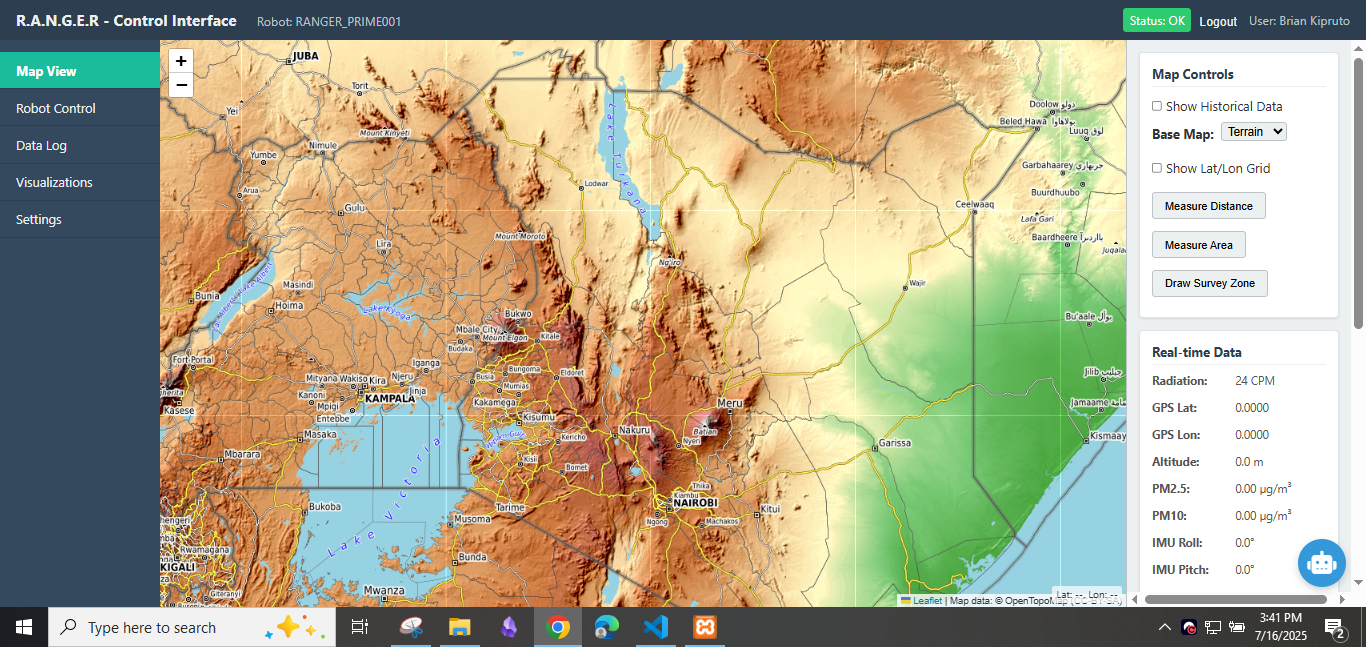
Terrain Map View


Inspiration
R.A.N.G.E.R is an acronym for (Robotic Autonomous Navigator for Geospatial Environmental Reconnaissance) Our Inspiration for the R.A.N.G.E.R project was born during a field Session for our other projects, The_Bytelab, in Marsabit county.
Concerns regarding hazardous waste in Kargi first surfaced in the 1990s when incidents of unusual deaths in Marsabit and northeastern Kenya prompted parliamentary inquiries into possible nuclear waste dumping 1. While the government denied these claims, the issue remained a source of anxiety for local communities. In the 1980s, oil exploration activities by Amoco Petroleum, a subsidiary of BP, coincided with reports of improper waste disposal practices 2. Adding to these concerns, the Italian NGO Legambiente reported the shipment of toxic waste to the region in the 1990s 2. Although specific details about the types and quantities of waste are scarce, local communities have reported finding "whitish salt or ash-like substances packed in bags" buried in the area 3. These discoveries fueled suspicions of a link between the waste and various health problems, including cancer 3.
A significant incident in 2000 involving the death of 7,000 livestock in Kargi further intensified these suspicions 3. The animals are believed to have consumed water from a borehole located near a deep hole allegedly drilled by unknown entities 3. This incident triggered investigations by the Kenyan government's National Environment Management Authority (NEMA) and the local Catholic church, which linked the deaths to contaminated groundwater.
We realized that environmental monitoring was a challenge in these remote and underserved regions. Traditional methods such as manual spot sampling and fixed sensor stations are often labor-intensive, costly for large areas, pose safety risks, and offer low temporal and spatial resolution. Aerial remote sensing, while providing wide coverage, has limitations in flight duration, payload capacity for diverse sensors, and cannot perform ground-level or contact-based sensing crucial for detailed environmental assessments. Existing UGVs are often too specialized, expensive, complex, or lack robust real-time data transmission and integrated user interfaces suitable for challenging developing country contexts.
What it does
Project R.A.N.G.E.R. is an integrated environmental reconnaissance solution designed for remote data collection, monitoring, and analysis in challenging, underserved regions. It deploys a mobile robotic platform equipped with a diverse suite of environmental sensors for real-time data acquisition, including particulate matter, radiation, IMU, GPS, and atmospheric conditions.
This data is processed onboard and transmitted via a robust communication link (long-range Wi-Fi, with LoRa planned for essential telemetry backup) to a central Python/Django web application. The web interface offers real-time data visualization, geospatial mapping, and controls, while an AI-powered assistant interprets analyzed sensor data in natural language, providing actionable insights to operators. Ultimately, R.A.N.G.E.R. provides remote, semi-autonomous environmental surveys, improving situational awareness and enabling efficient reporting, particularly where manual access is difficult or hazardous.
How we built it
R.A.N.G.E.R. is built as an integrated system, balancing advanced capabilities with the realities of resource-constrained computing and field deployability. The mobile robotic platform uses an Arduino Mega for low-level sensor data acquisition and control, paired with a Raspberry Pi for higher-level processing, enabling a cost-effective yet capable onboard compute solution. Data is streamed via a robust communication link, currently long-range Wi-Fi, with LoRa planned for essential telemetry backup in low-bandwidth environments.
We have built the central backend is a Python/Django web application, utilizing Django Channels for real-time WebSocket communication and a MySQL/MariaDB database for logging processed sensor data. The web-based frontend provides visualization and control, while an AI-powered assistant, a wrapper for the Google Gemini API with custom contextual prompting, is integrated to interpret data.
Future plans involve leveraging ROS for advanced autonomous navigation (VIO/VSLAM) on the resource-constrained Raspberry Pi and a modular hardware design, including 3D-printed components, for easy sensor integration and ruggedization tailored for even more challenging environments.
Challenges we ran into
Developing R.A.N.G.E.R. has been a journey with the very real challenges of bootstrapping a deep tech project in a resource-constrained environment. Securing the initial capital to translate ambitious designs into tangible prototypes has been a constant balancing act, meaning every component choice, from the Arduino Mega to the Raspberry Pi, and every software decision, like opting for Django, is made with an acute awareness of its cost implications, pushing us to innovate not just technically, but economically.
Technically, we've wrestled with ensuring robust and efficient data acquisition and processing on the Raspberry Pi, and then relaying that data via a reliable communication link (long-range Wi-Fi) over potentially intermittent or low-bandwidth connections in remote field settings. Providing a seamless and user-friendly web interface for real-time monitoring and control, especially for ground-level environmental data in remote areas, also presented unique integration challenges.
Accomplishments that we're proud of
We are immensely proud of several key accomplishments in the R.A.N.G.E.R. project, particularly in creating a functional, integrated solution under resource constraints that tackles real-world problems. We've successfully developed a unified end-to-end system that seamlessly integrates a mobile ground-based robotic platform with a diverse environmental sensor suite, robust real-time data communication, and a comprehensive web-based control and visualization interface.
This system is specifically architected for field deployment in challenging Kenyan environments. We're especially proud of the direct integration of an AI assistant with custom contextual prompting within the live operational dashboard, allowing users to query project information and analyzed sensor data in natural language. This innovative feature bridges the gap between raw sensor data and actionable understanding, solving the problem of data overload and making complex environmental data more accessible to operators.
What we learned
Through the development of R.A.N.G.E.R, we've gained invaluable insights, particularly that motion is key – consistent progress, even in small iterations, is crucial for turning ambitious deep tech concepts into tangible solutions, especially within a bootstrapping context.
We've also learned the critical importance of designing for resource-constrained computing environments, optimizing both hardware (e.g., balancing Arduino for low-level tasks and Raspberry Pi for higher processing) and software for efficiency and resilience in the face of limited power, memory, and connectivity. The iterative process has underscored the necessity of a modular and adaptable platform design, both in hardware for sensor integration and in software for data models, enabling future expansion to diverse environmental monitoring tasks like food systems and soil testing.
Furthermore, we've learned the power of integrating AI-assisted data interpretation directly into the operational workflow, significantly enhancing accessibility and understanding of complex field data for operators. These lessons are shaping our approach to building practical and impactful solutions for Africa's unique realities
What's next for R.A.N.G.E.R
The immediate next steps for R.A.N.G.E.R. involve the planned pilot deployment in Kargi, Marsabit County, Kenya, focusing on environmental baseline studies and continuous monitoring.
A key technical priority is the implementation of the Advanced Autonomous Navigation System (ROS-based), specifically optimizing Visual-Inertial Odometry (VIO) or Visual SLAM (VSLAM) for robust performance on the resource-constrained Raspberry Pi in challenging terrains. This will be tightly integrated with the Django backend via our unique ROS-Django integration architecture. We also plan to evolve the AI-assisted data interpretation by moving towards custom-trained or fine-tuned models for more advanced analytical tasks and anomaly reporting.
Concurrently, we will continue refining the modular hardware design for enhanced sensor integration and platform ruggedization. This inherent modularity and adaptability is key to R.A.N.G.E.R.'s strategic vision for broader applications, moving beyond initial environmental monitoring to include critical areas like food systems and soil testing, allowing it to be reconfigured for diverse environmental data collection tasks.
References
- Alarm raised over rising cancer cases in Marsabit - The Star, accessed January 11, 2025, read more
- Residents Sue Kenyan Government Over Alleged Oil Company ..., accessed January 11, 2025, read more
- Residents sue State for deaths caused by toxic waste in desert - Daily Nation, accessed January 11, 2025,read more
- WB - World Bank Documents and Reports, accessed January 11, 2025, read more
- In Marsabit, water blamed for cancer - Daily Nation, accessed January 11, 2025, read more
- NATURAL RADIOACTIVITY IN DRINKING WATER SOURCES IN KARGI AREA, MARSABIT – KENYA - EA Journals, accessed January 11, 2025,read more
- Natural Radioactivity and Excess Lifetime Cancer Risk Associated with Soil in Kargi Area, Marsabit-Kenya - ResearchGate, accessed January 11, 2025, read more
- Marsabit community petitions Parliament over toxic waste disposal claims, accessed January 11, 2025, read more


Log in or sign up for Devpost to join the conversation.