-
Check out the website for more!
-

Check out the website for more!
-

Check out the website for more!
-
Check out the website for more!
-

Check out the website for more!



Inspiration
Our inspiration grew from conversations with post-operative patients, physical therapists, and clinicians who highlighted a gap in home mobility support. We saw how simple daily activities like climbing stairs or moving between rooms became significant barriers to independence, especially after surgery. Many current aids require expensive home installations, constant caregiver assistance, or are just not practical for real-world home environments. We wanted to restore freedom and autonomy for patients the moment they come home. Drawing inspiration from the tri-wheel stair climbing dolly and bike brake mechanisms, QuinLift builds on proven mobility and control technology to create a walker attachment that enables safe and easy stair navigation.
What it does
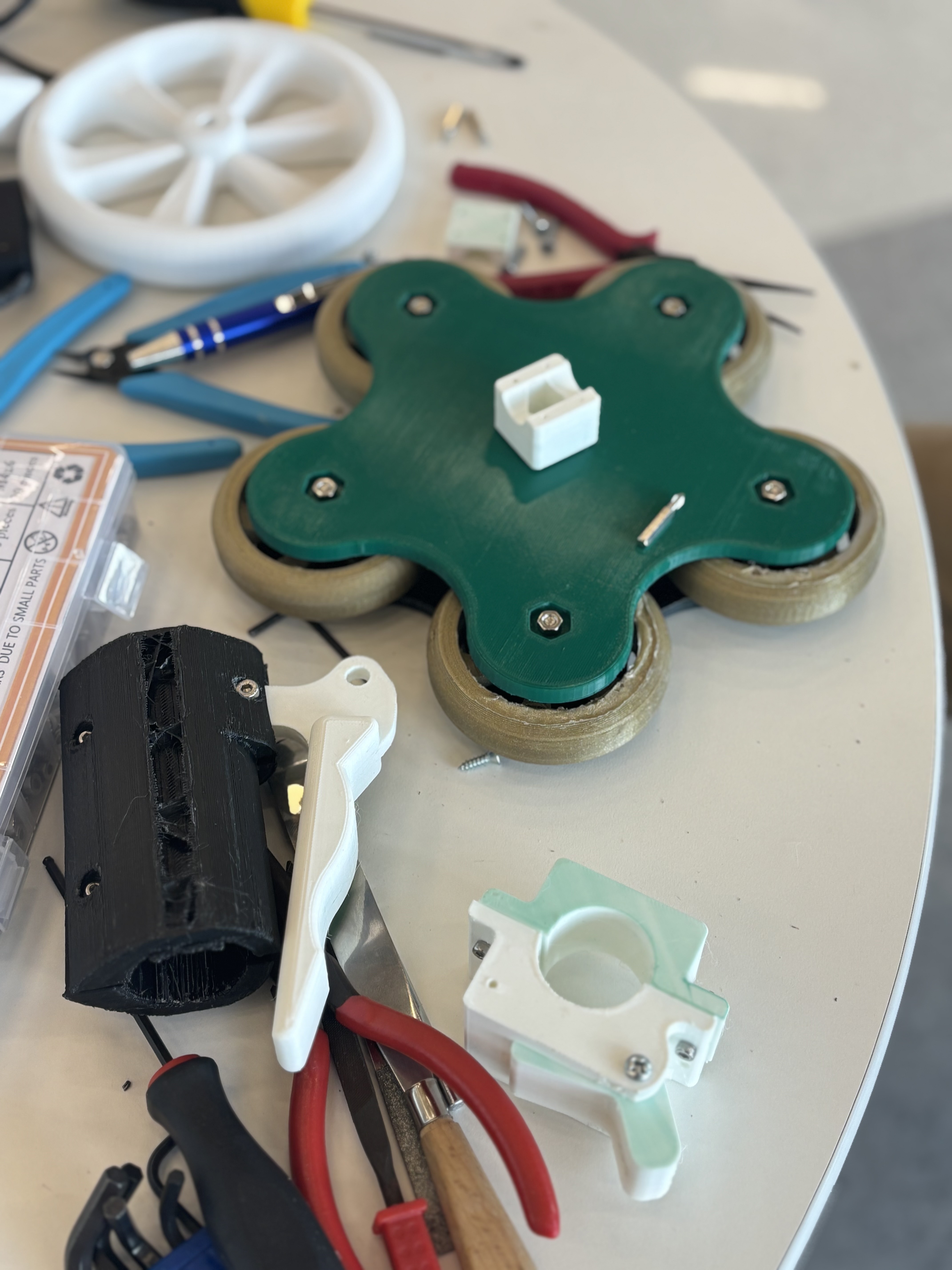
QuinLift is a universal walker attachment that enables users to safely and easily climb stairs and adjust to different home levels. Featuring a rotating five-wheel hub and a single-lever height adjustment, QuinLift installs onto any standard walker, allowing smooth navigation across steps, thresholds, and variable terrains without added complexity or bulk. Our design supports independence indoors and outdoors, eliminating the need for complex modifications or extra help.
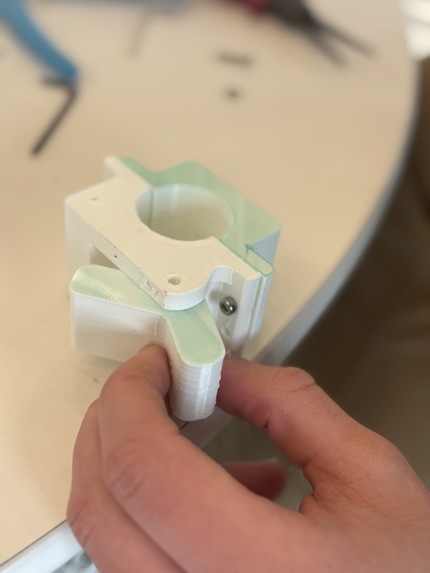
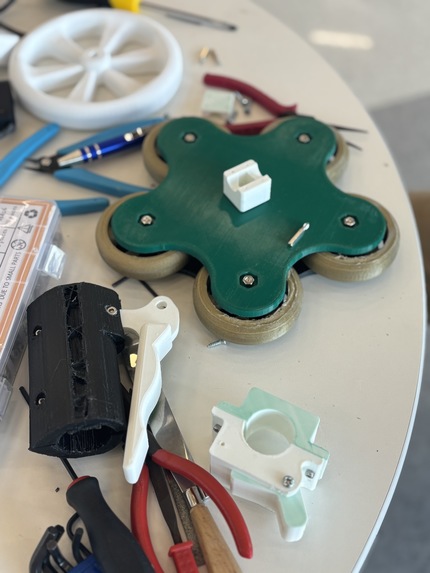
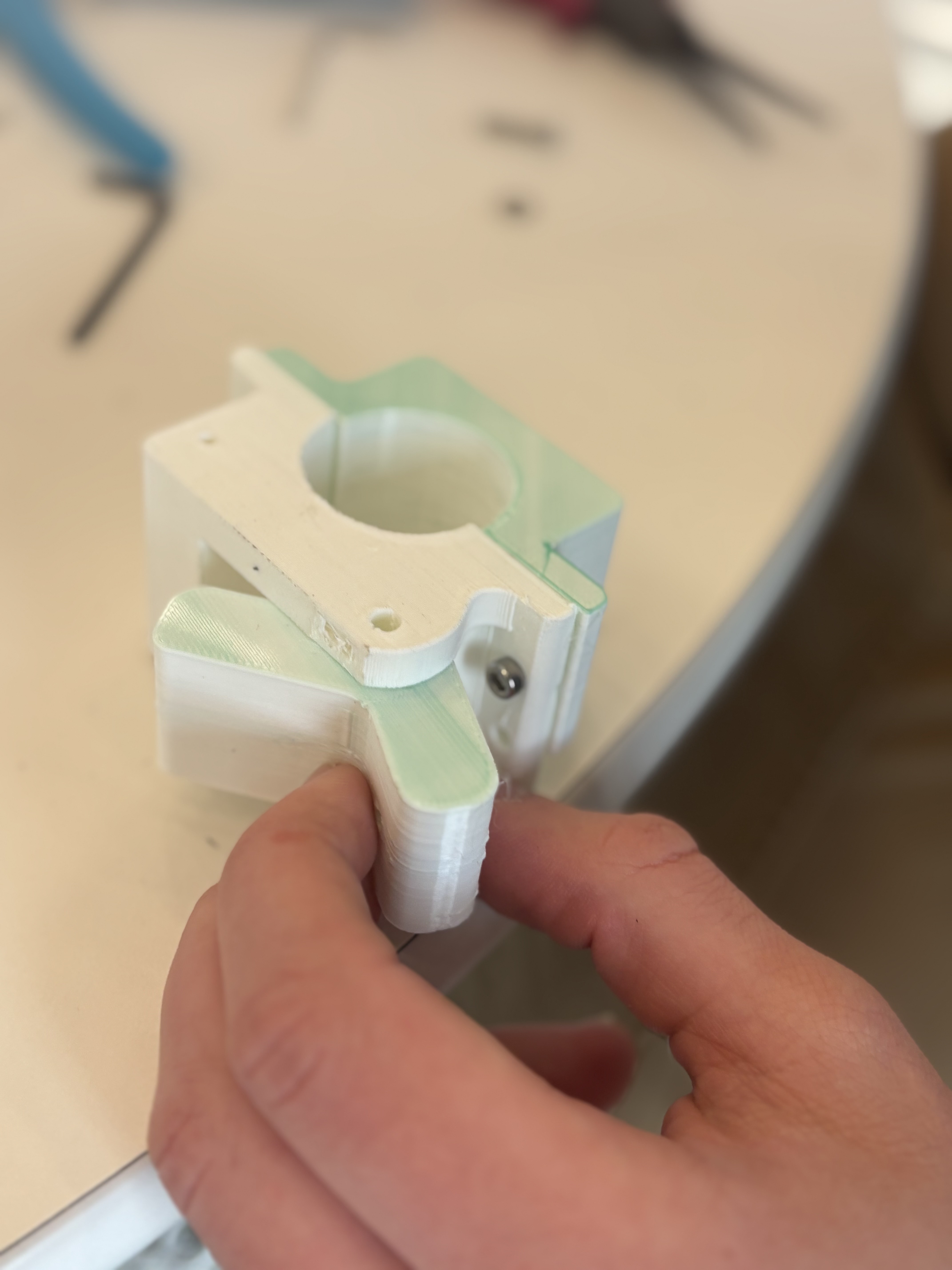
How we built it
We started by prototyping spring-assisted systems to enable adaptive motion for stair climbing. To define reliable mechanisms, we experimented using real-world objects—such as multi-wheel dollies and bike brake assemblies—testing how existing designs perform climbing and descending. Our process included building model staircases for simulated environments and iterating on both three-wheel and five-wheel assemblies, refining their interaction with steps and transitions. Hands-on prototyping and user observation were central to adapting and optimizing the system for everyday in-home use.
Challenges we ran into
- Designing a universal fit for the wide range of commercial walker models
- Ensuring stability and safety on variable stair heights and surfaces
- Balancing strength, reliability, and lightweight construction
- Sourcing materials that support both mass manufacture and user affordability
- Achieving intuitive controls for users with reduced strength or dexterity ## Accomplishments that we're proud of
- Creating the first easy-to-use, cost-effective walker attachment for stair and threshold navigation
- Supporting rapid user installation without tools or permanent walker modifications
- Enabling patient independence on stairs with a purely mechanical, maintenance-free system
- Receiving positive feedback and validation from physical therapists and target users during testing ## What we learned
- Real-world user feedback is essential—what seems intuitive in the lab may not translate for all patients
- Lightweight, simple mechanisms often outperform more complicated solutions, both in usability and cost
- Home environments are highly varied, so adaptability and ease-of-retrofit are top priorities
- Independence in mobility has an outsized impact on patient confidence and recovery progress ## What's next for QuinLift
- Expanding testing to a wider user base, including in rehabilitation and assisted-living facilities
- Further refining universal mounting and safety features based on ongoing user input
- Pursuing regulatory feedback and early clinical partnerships
- Exploring additional attachments (e.g., for outdoor steps or high-rise thresholds)
- Preparing for scaled manufacturing and retail partnerships to reach more users
Built With
- fusion

 Olatunbosun")


Log in or sign up for Devpost to join the conversation.