-
-
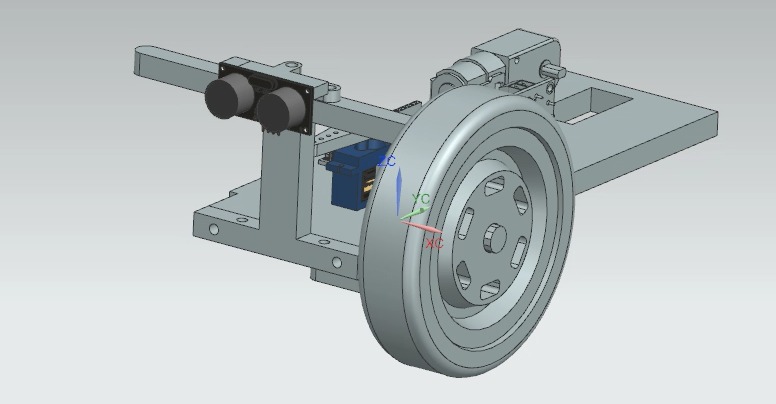
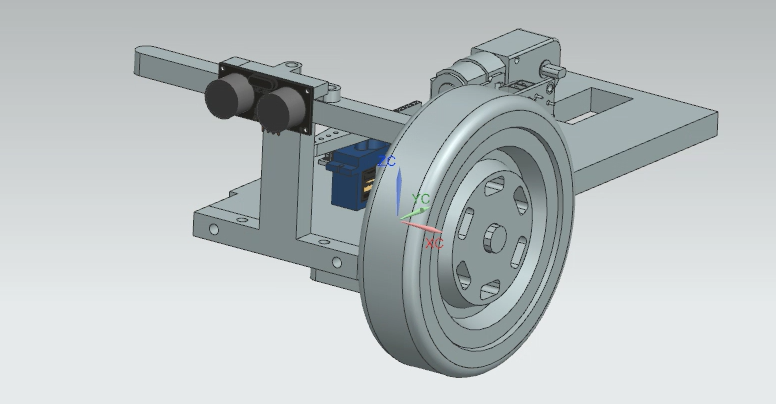
Tubster's CAD assembly, which led the 3-D printing and circuit packaging design.
-
Inspiration
College campuses experience a lot of small food and beverage purchases everyday, which can often lead to the waste not being properly disposed into garbage bins. The result is paper, cans, plastic bags, and other waste accumulating on sidewalks, streets, and in trees.
What it Does
As a part of Project Tubster, we created the first edition of an autonomous garbage collection robot, designed to pick up trash on sidewalks in urban or campus-like areas.
How We Built it
Using Arduino, biodegradable 3-D printed material, simple electronics, and CAD software, the Tubster was completed. The arduino is responsible for using signals from the sensor on the front of Tubster, and then controlling the drive motor, steering system, and scooping system that allows Tubster to navigate to the next piece of liter.
To help make Tubster more predictable and understand the movement that the robot is capable of, a vehicle dynamics model was implemented using MatLab and Simulink, which have built-in vehicle modelling capabilities. The model allows for optimized turning radius, and showed Tubster's 0-60 time to be less than 2.0s. (0-60 mm).
Challenges We Ran Into
The Tubster needs to be able to hold and move the liter it picks up along its journey. Because of this, we needed to design in terms of strength, but also weight reduction, so that the motors are actually able to carry any load put on the robot. Additionally, due to the limited 24 hour allotted worktime, printing efficiently means removing unnecessary material where possible, in CAD, before printing. As a result, our wheels alone were able to decrease in mass from 150g to about 90g.
Additionally, because it is a trike style drive system (3-wheels), this adds some complexity when trying to balance the load at the rear, while also efficiently delivering power to the wheel. To account for this, we utilized a gear system, where the drive motor can more efficiently put power to the rear axle, without having to be mounted on the outside of the center of gravity, which would lead to Tubster inevitably falling and not being able to get back up!
Accomplishments that We're Proud of
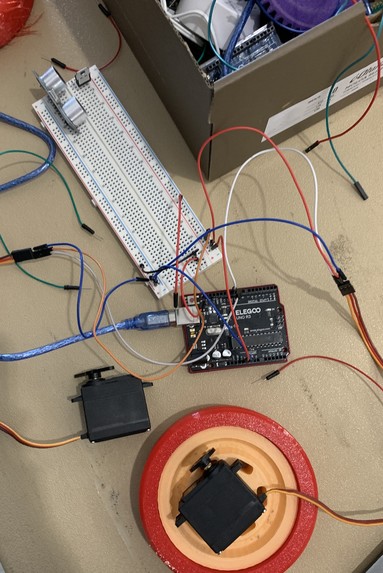
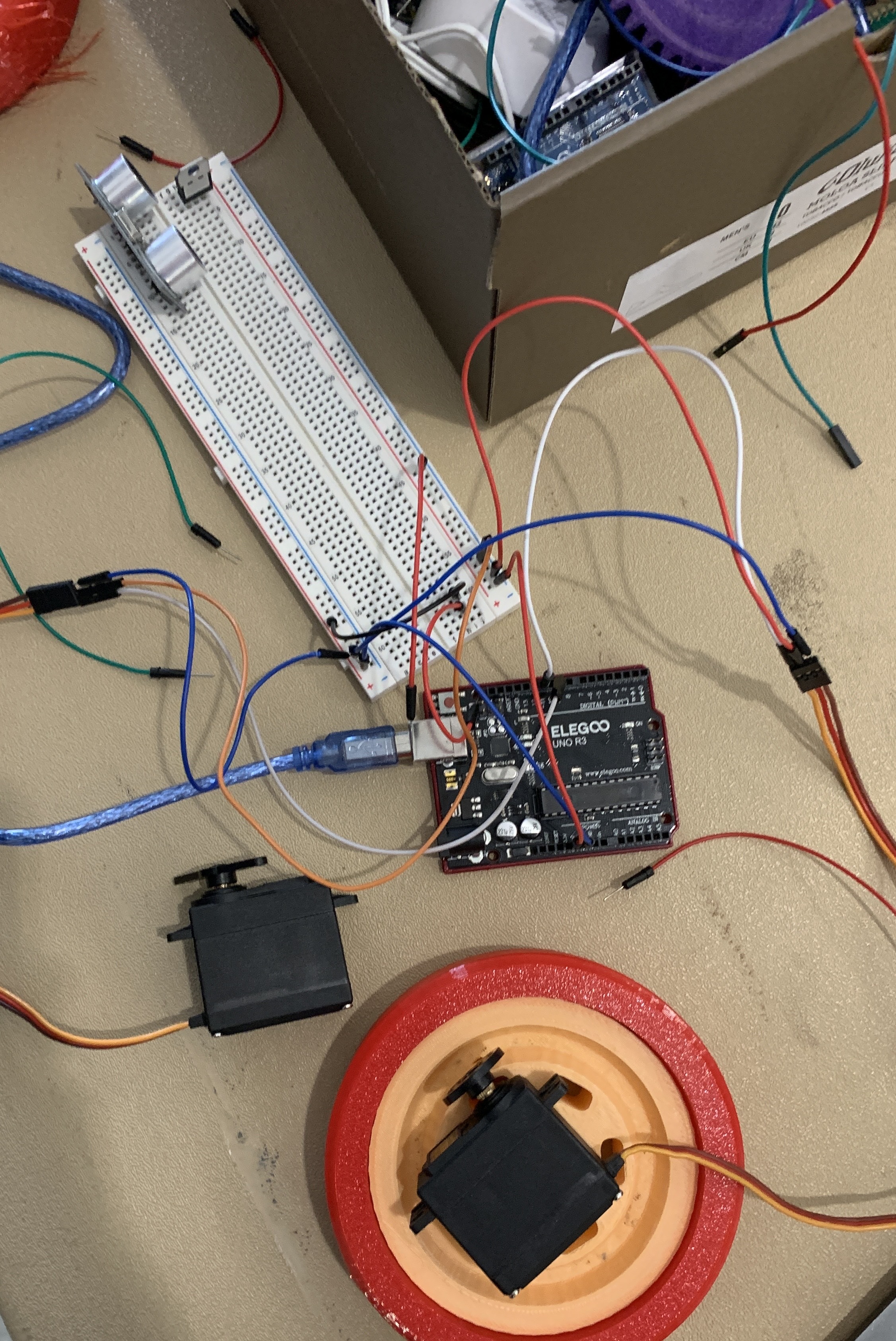
The Tubster involves 3 motors, 1 motor driver module, sensors, and the Arduino itself. Being able to wire everything together and properly mount it to the frame is a challenge. It's still something that is being developed but in our drafts we are happy to note that our circuit is functional. Finally, having no experience with Simulink, it is nice to see that the model has some functionality.
What's Next for Project Tubster
Unfortunately, Tubster V1 was not fully assembled by presentation time, which automatically becomes the next step for our new lil friend!



Log in or sign up for Devpost to join the conversation.