

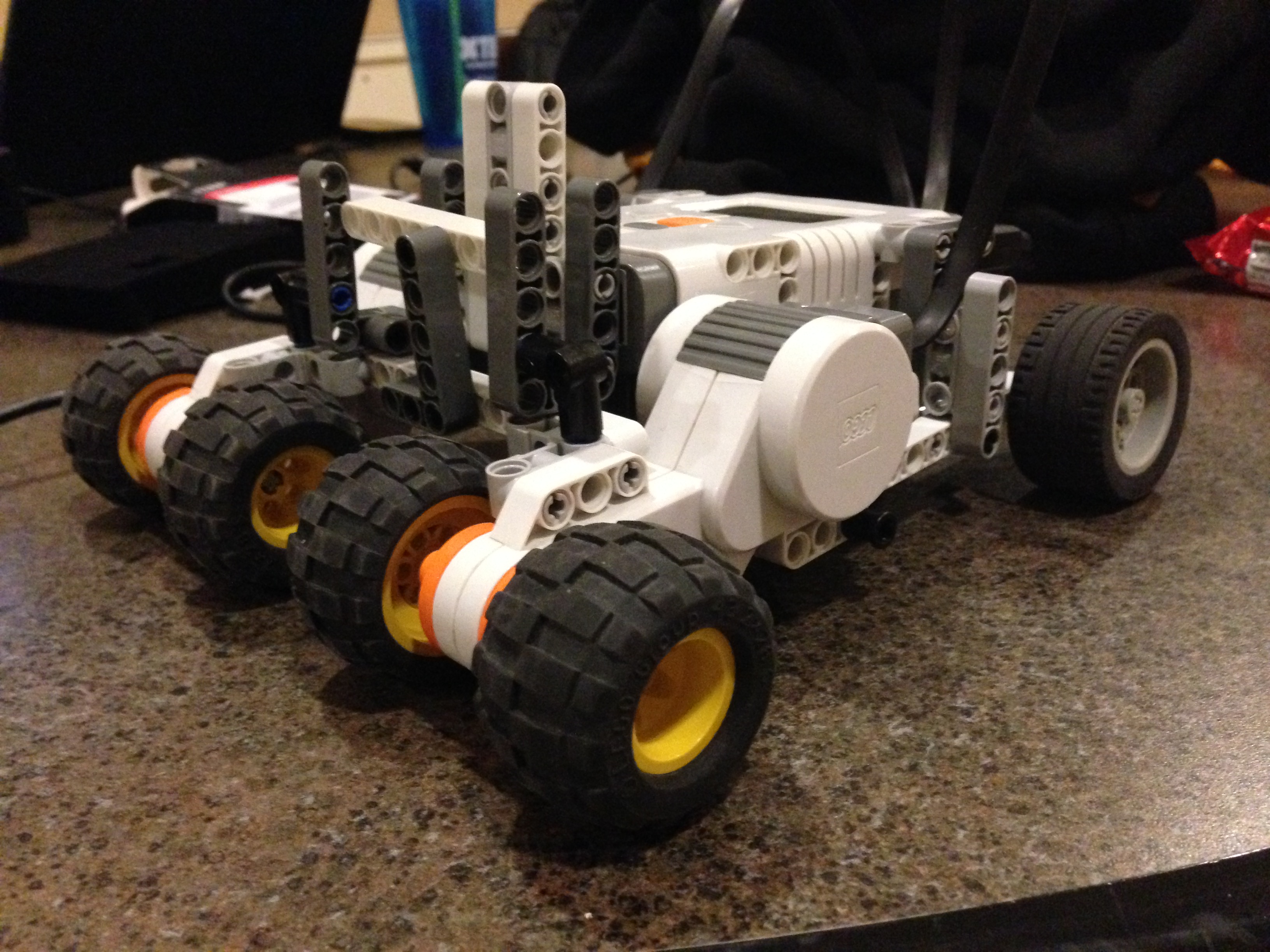
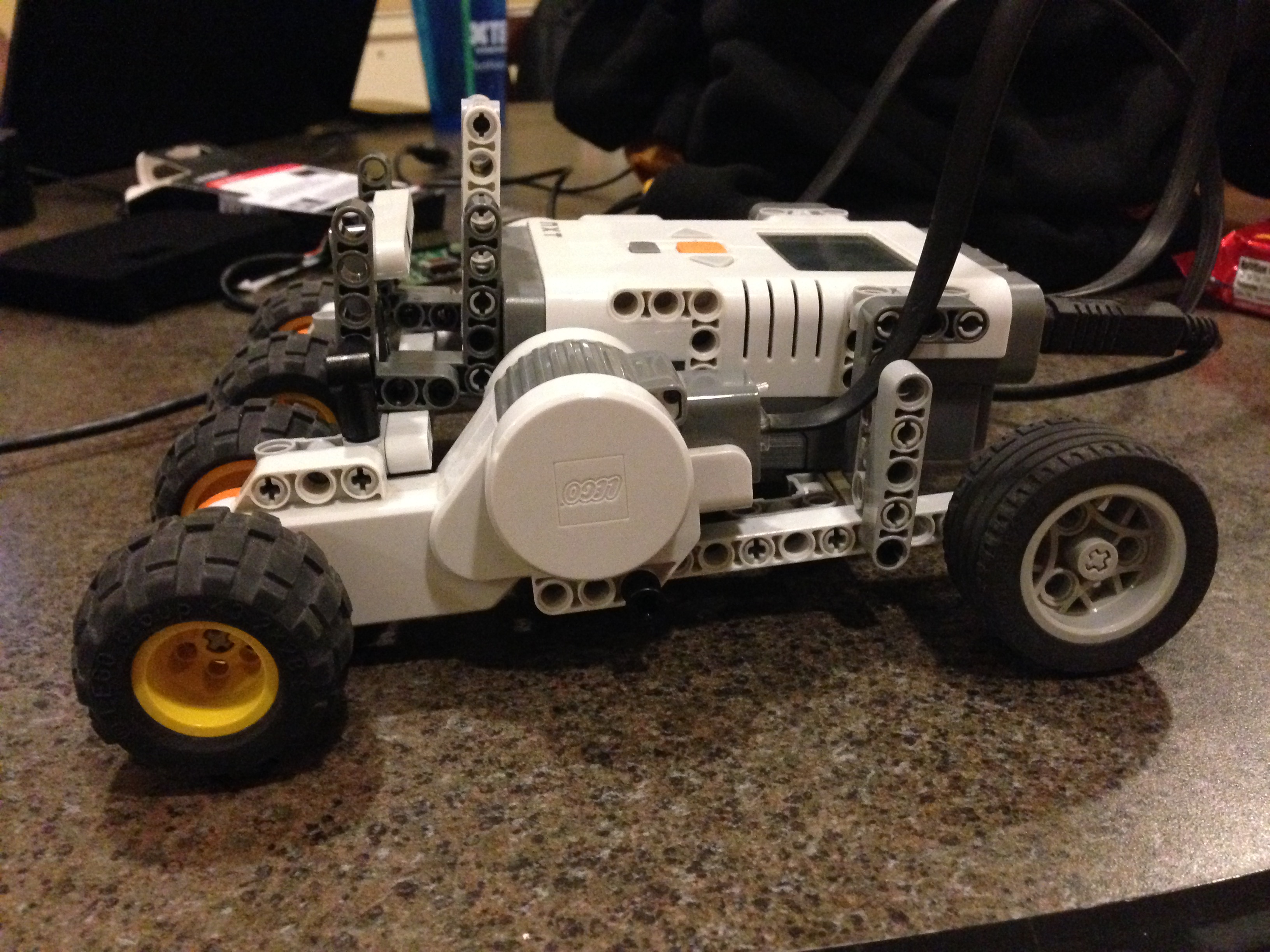






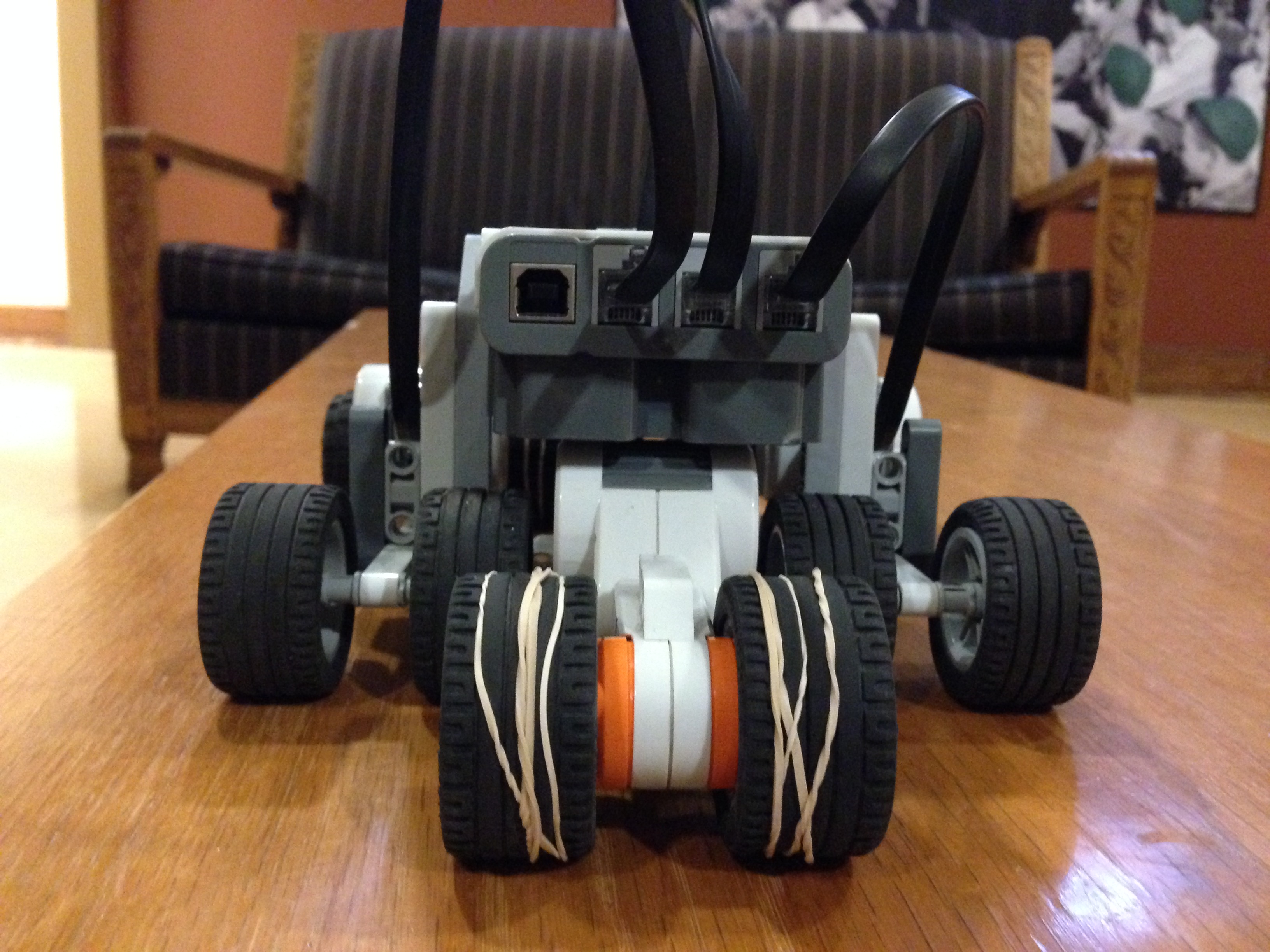



Our story, was that we all had vastly different pieces of hardware, and we wanted to be able to implement them all with one hack. We started with a Lego MindStorm NXT brick, Google Glass, and a Myo armband. After brainstorming, instead of focusing on one piece of hardware, we decided to combine all three into one ambitious project. We would connect a camera to an NXT based rover, which would be streaming to Google Glass that the user is wearing. The user can look into the glass eyepiece to see where the rover is without actually being able to see the rover. From there, the user is able to control the rover with a virtual joystick via the Myo armband. This allows the user to drive the rover around and see the things the rover can see, without needing anything more than a bracelet, a headset, and a bluetooth connection. Our inspiration relates to this in that the technology in the world gets smaller and faster every day, which is perfect for our target user, the US Military.
We decided the target user would be the US Military, because with the proper hardware, the entire machine can be made significantly more durable, and also smaller. This would allow remote viewing of potentially dangerous areas with much less hardware, and weight, than is currently used.
The feature we're most proud of is being able to control the rover with the Myo armband instead of the arrow keys on a computer. It took a long time to get it to work, and many times we had considered stopping with Myo and just using the arrow keys on a laptop instead of the virtual joystick.
Myo control can be swapped out for twilio text message control
Myo control can also be swapped out for Pebble smartwatch
Github: www.github.com/merctron/myo-nxt

Log in or sign up for Devpost to join the conversation.