-
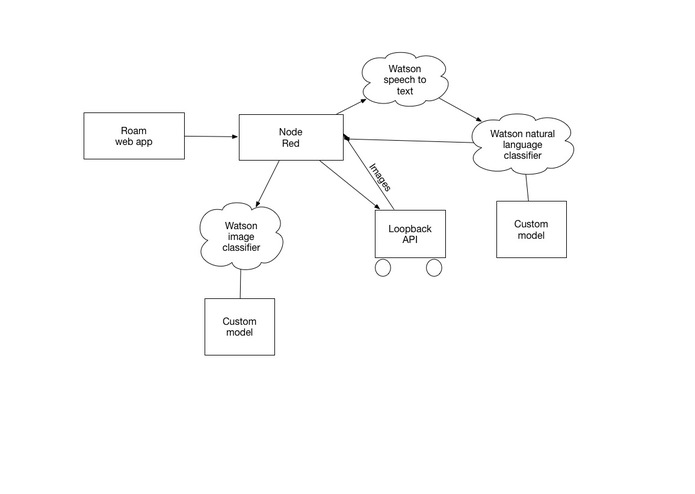
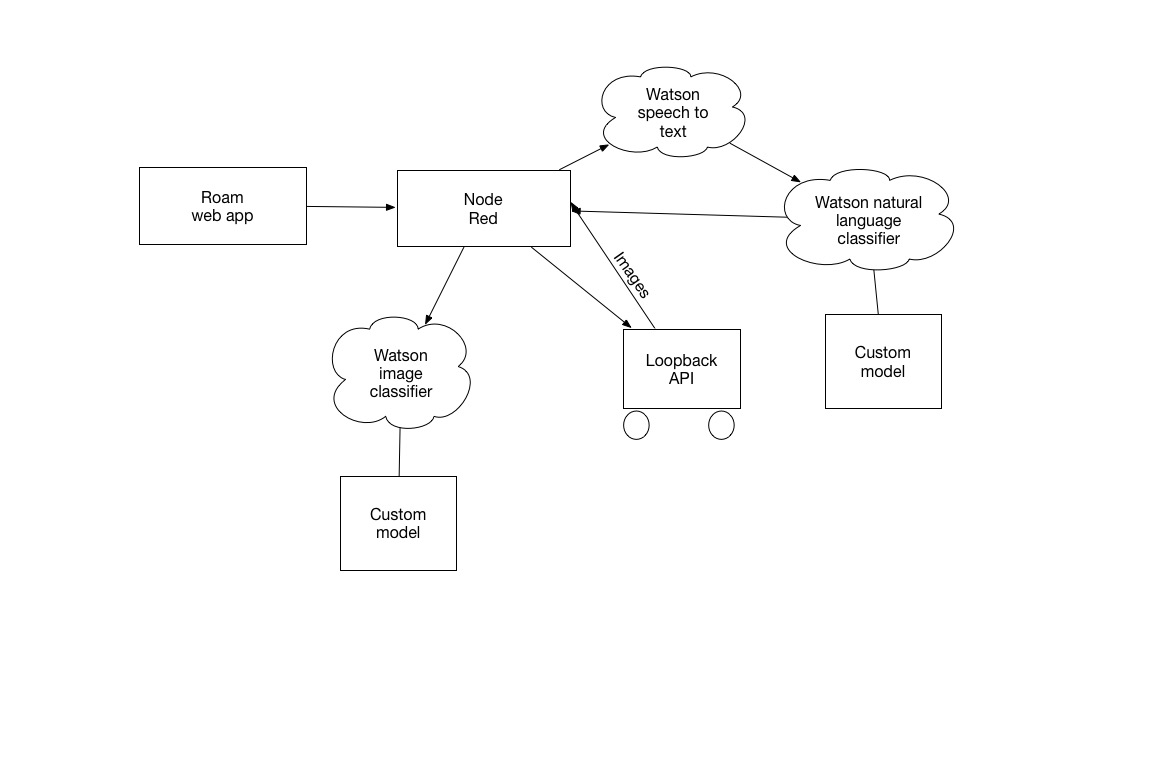
Diagram showing how our project works.
-
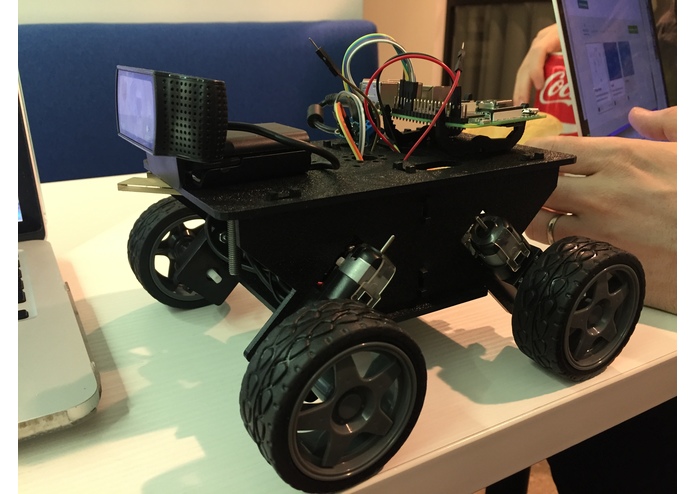
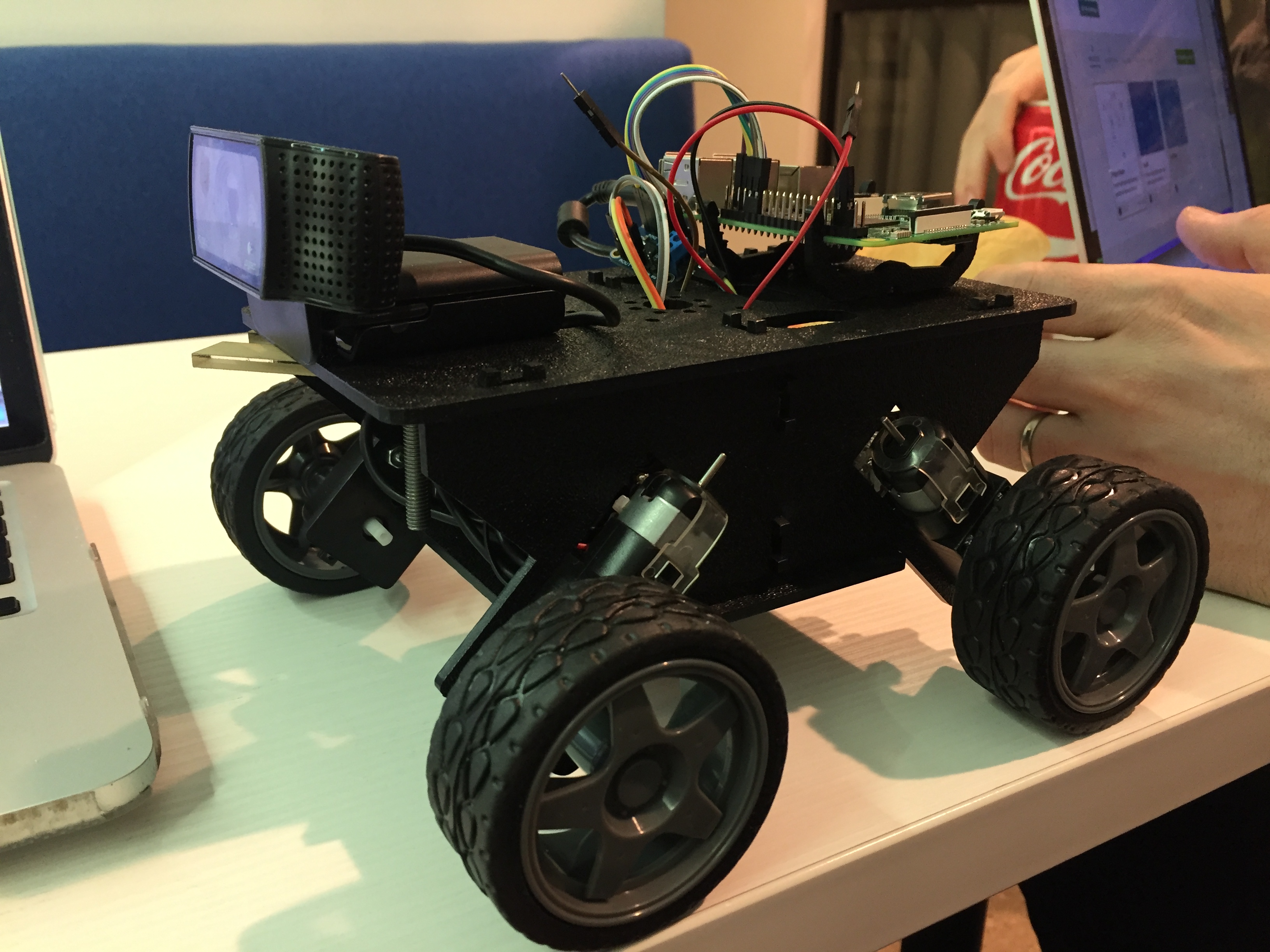
One of our Roam bots
We have seen a lot of automated home devices and decided that they lacked mobility. So we decided to make Roam.
Roam goes around your house and can do tasks such as "Roam, find my keys" "Roam get me a Coke" "Roam water the flowers" "roam add milk to the shopping list". Roam robots are designed to work together with other Roam as a team. We also use a waypoint system that the user can activate.
We used IBM Watson for image recognition so it can find the items in question. We also used IBM Watson for speech detection. We used a Raspberry Pi to control the robots. We used loopback to connect to the robots from Node-Red where we were connecting to IBM Watson.
Built With
- ibm-watson
- loopback
- node-red

Log in or sign up for Devpost to join the conversation.