Inspiration
Many of us struggle with smartphone addiction, even if we’re hesitant to admit it. Existing solutions like lockboxes or app restrictions are easy to ignore or disable, so we wanted to create a more effective and engaging way to hold ourselves accountable.
What it does
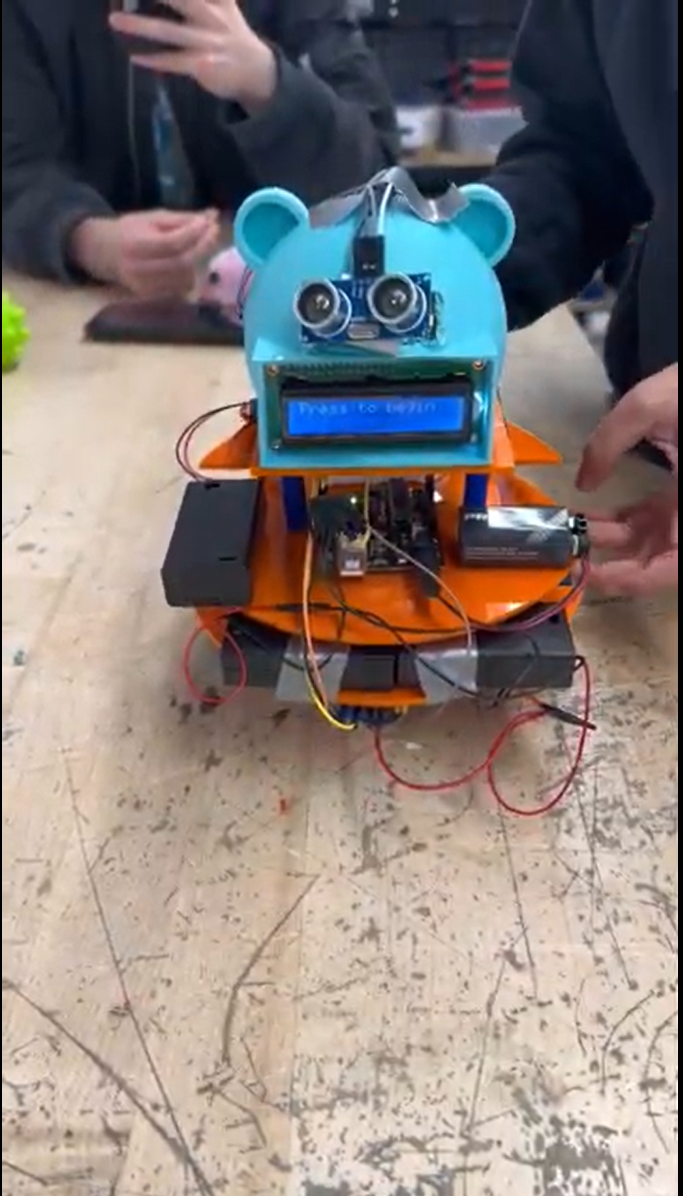
When a phone is placed inside the lockbox, pressing a button shuts the door and starts a timer. During the lock period, the robot detects if someone approaches and scrambles away to keep the phone out of reach. Once the timer finishes, the door unlocks automatically.
How we built it
We laser cut acrylic sheets for the chassis and electronics bay and used super glue and 3D-printed standoffs to assemble the structure. The robot head was designed in Onshape with slots for the ultrasonic sensor and ears. We used servo motors and two relays to control the wheels, with an external 5V supply powering the relay module and Arduino. Additionally, we used separate 5V battery pack powered other components due to high current demands. For the sensor we used an ultrasonic sensor that triggered the robot to drive away when an object was detected within a certain range for a certain period of time. The user can see the timer from the LCD display on the head of the robot.
Challenges we ran into
Our original design was too large for the 3D printers, so we scaled it down and repurposed the head for component storage. We had to manage power distribution across multiple components, so to do this we switched to external power supplies. Additionally, due to our time constraints we made sure to parallelize as many tasks as possible to ensure that all aspects of our project would be complete. As a result more than one person was working on the code and we had to make sure to coordinate coding subtasks to ensure smooth cohesion. Lastly, the robot has many states which must be respected in order to have a logically functioning robot.
Accomplishments that we're proud of
We’re proud of how we improvised when problems came up, like creating standoffs when we lacked long enough bolts. We managed to integrate code written by multiple people, divided tasks efficiently for parallel work, and learned quickly despite limited Arduino experience.
What we learned
We learned how to manage high power demand across multiple components. Originally, we thought we could power most things from the Arduino's 5V supply, but later we realized the current draw was to large so we switched to a battery pack. Furthermore we learned how to design effectively under time pressure. When you have 36 hours you can only go through so many iterations depending on the method you choose. Lastly, because this was a hardware project we had to adapt when parts were unavailable and find suitable replacements.
What's next for Procrastibot
We plan to add a speaker module, round out the body design, and improve motion smoothness. Future upgrades could include a built-in number pad to set the timer and wireless modules for a cleaner and more user-friendly experience.




Log in or sign up for Devpost to join the conversation.