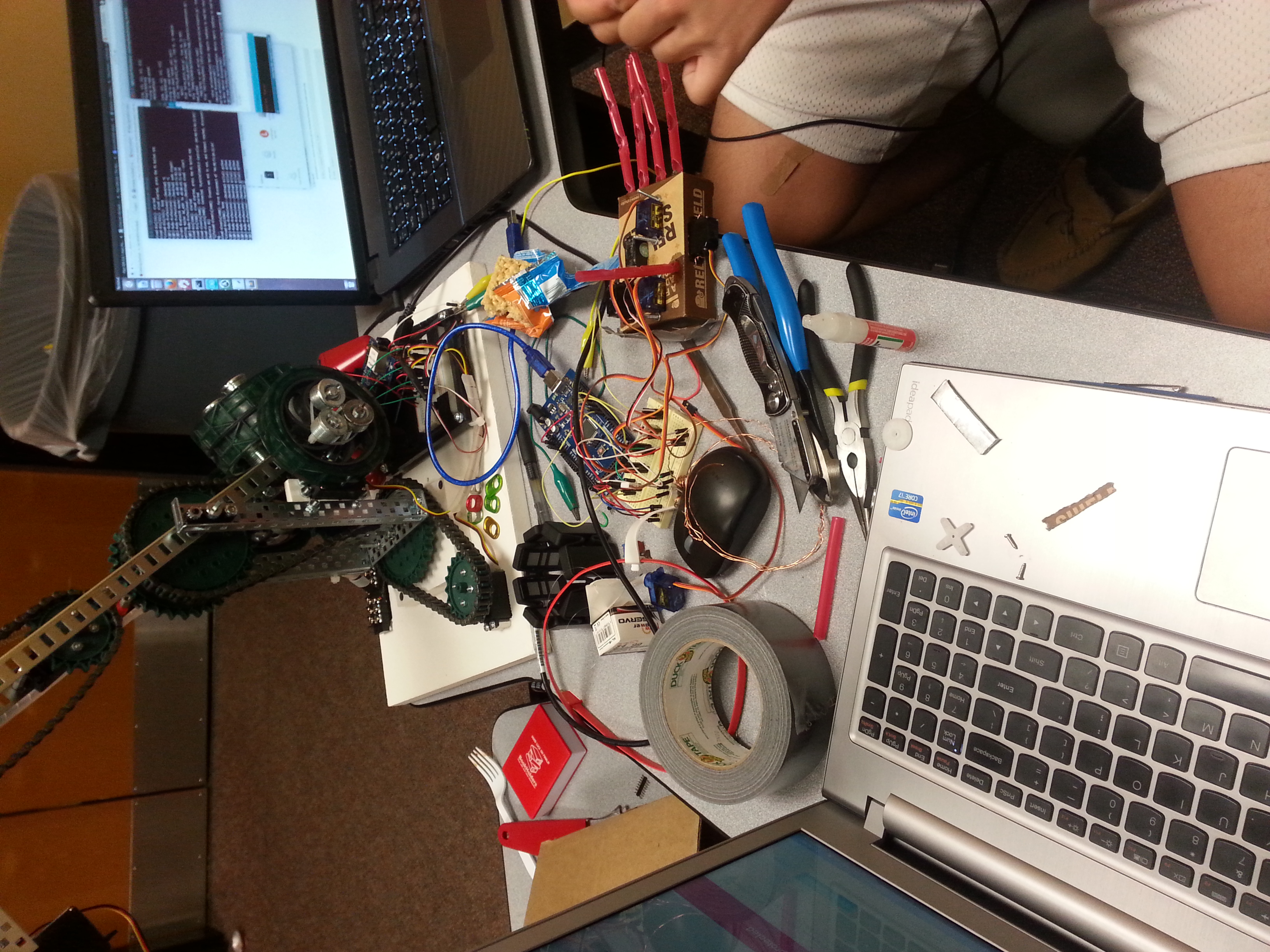
Our project began as an idea to simply compete in the Virginia Tech Hackathon. After days of brainstorming and eliminating many ideas, we came up with the idea of building a robotic hand that could use leap motion in order to emulate our hand instantaneously and precisely. The project required a variety of skills brought to the Hackathon by each one of us in order for this to work. We are proud of our robotic hand and prototype, although the hand we 3-D printed turned out to be too finicky to work properly. We ended up using our first prototype and perfecting the movement. Upon completion of the hand, we moved to having complete arm movement.
Prestige Robotics Hand
Leap-Motion controlled robotic hand that mimics human movement
Updates

Leave feedback in the comments!
Log in or sign up for Devpost to join the conversation.