-
-
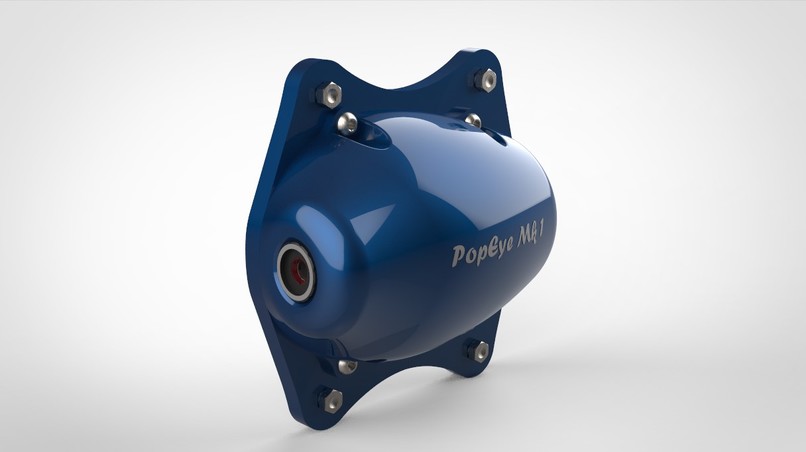
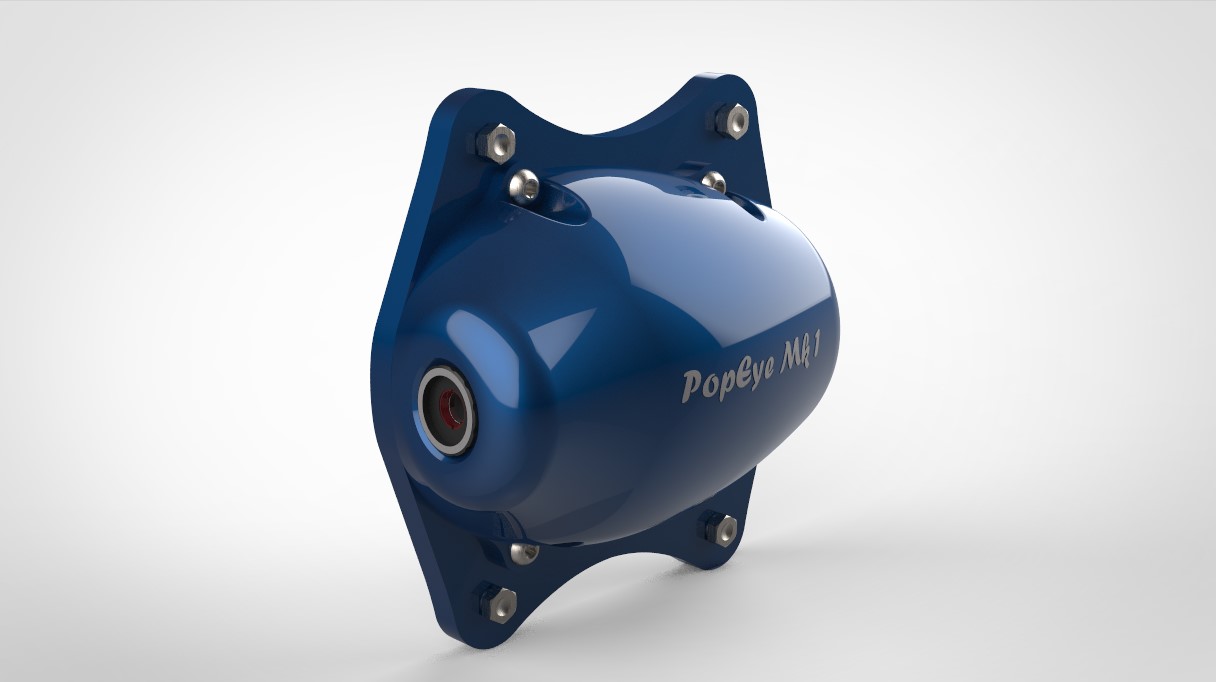
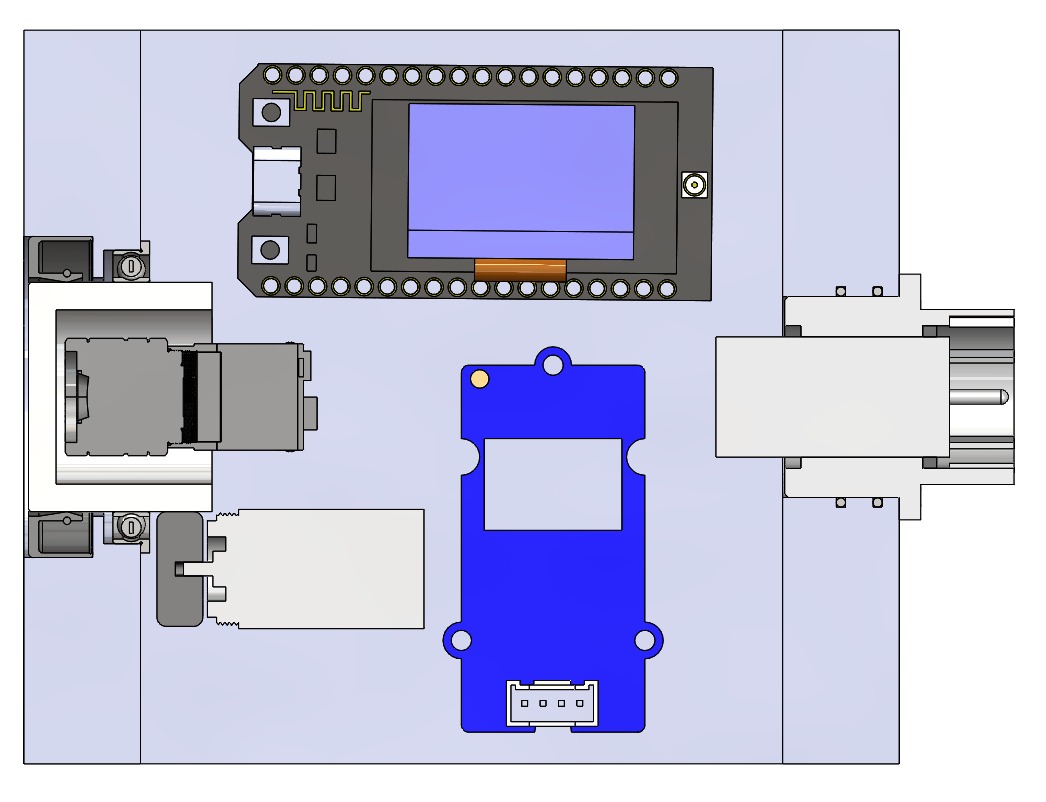
Enclosure CAD design.
-
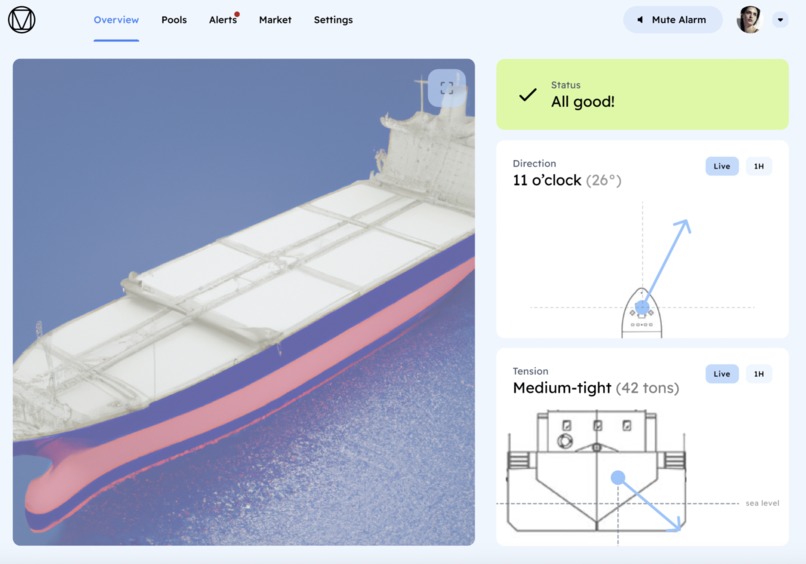
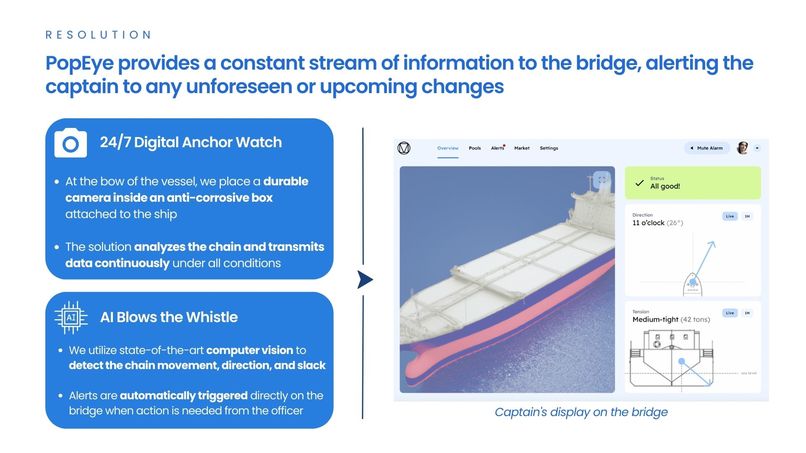
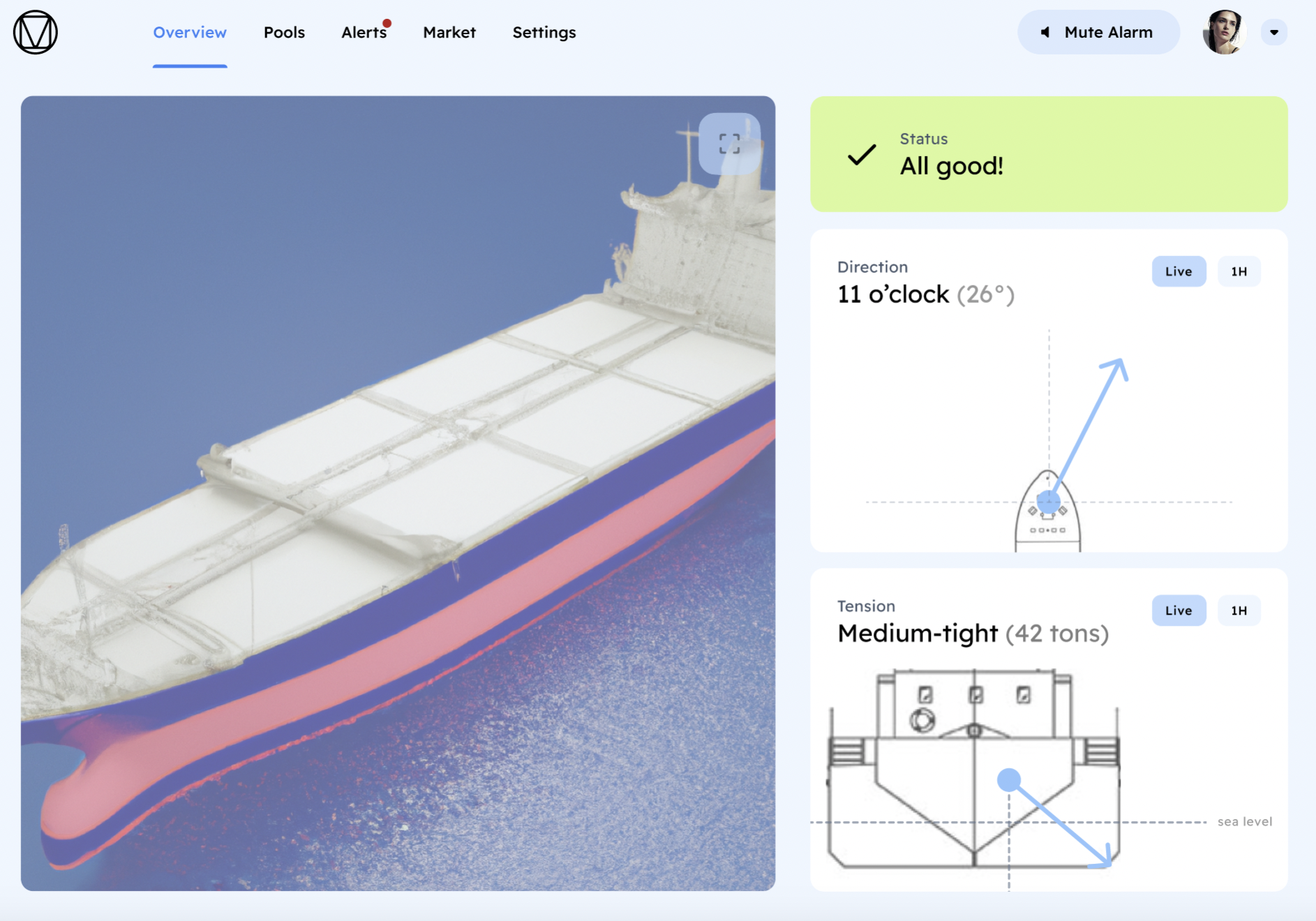
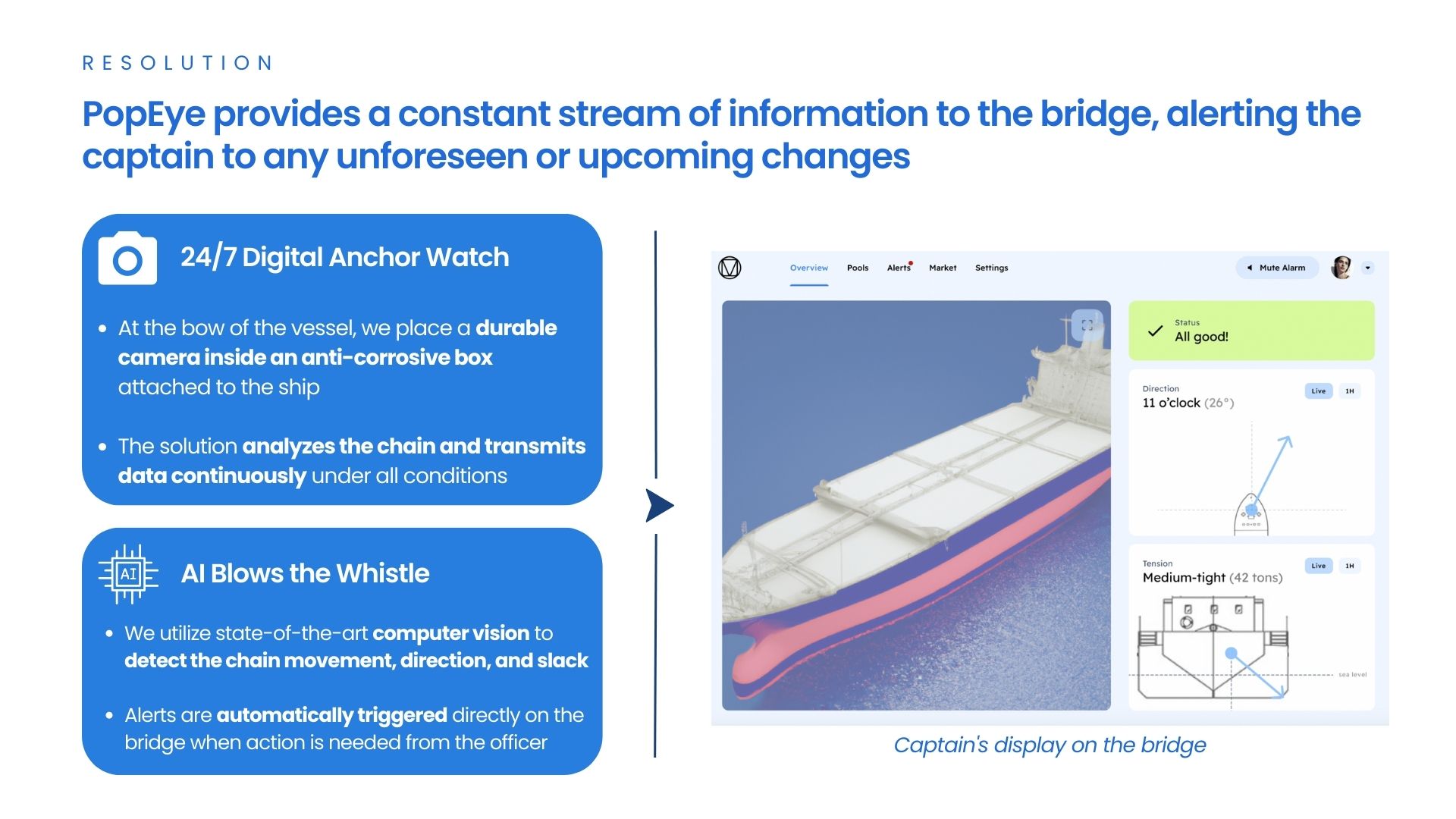
Bridge display.
-
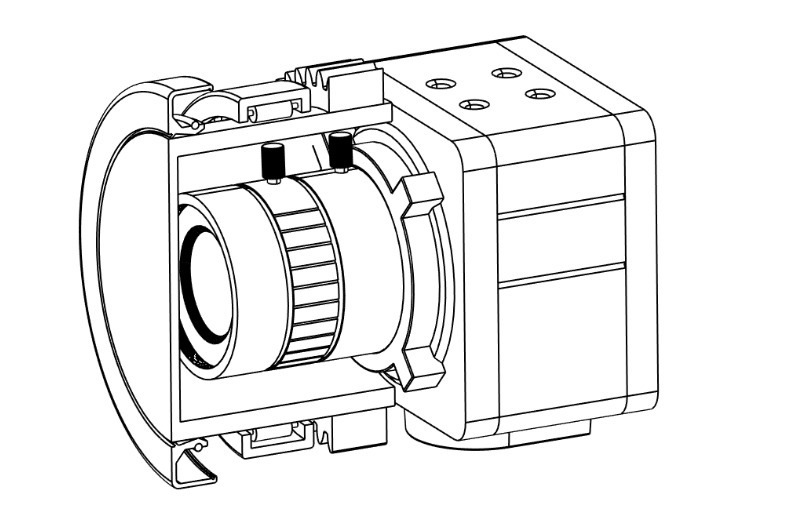
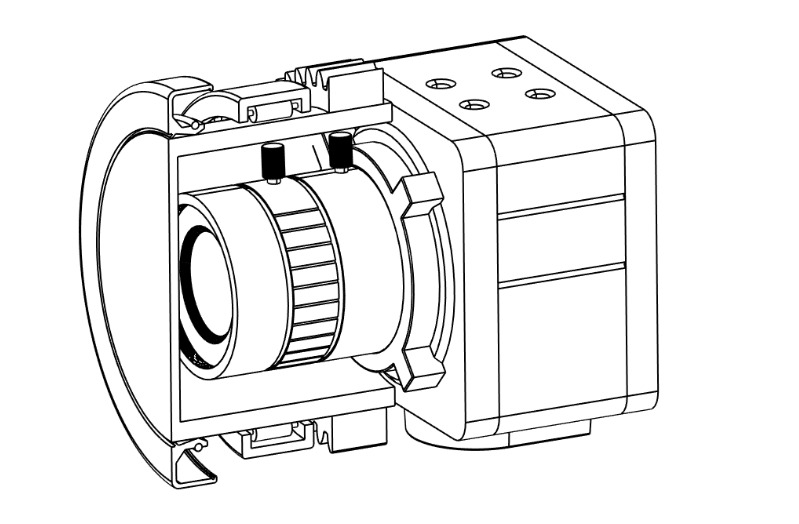
Visual equipment exploded view.
-
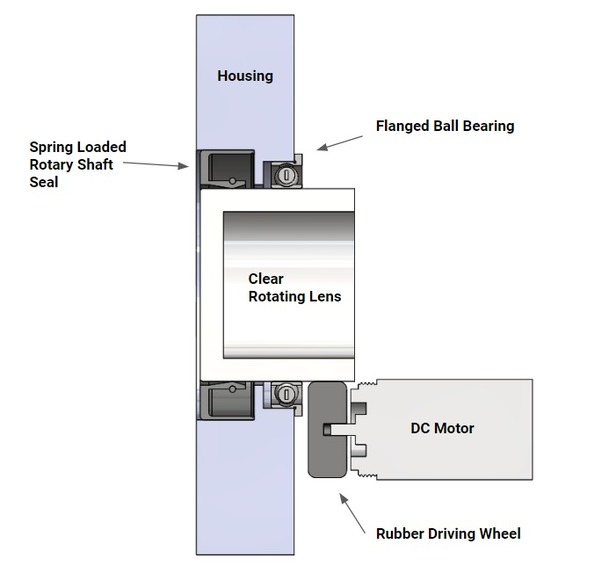
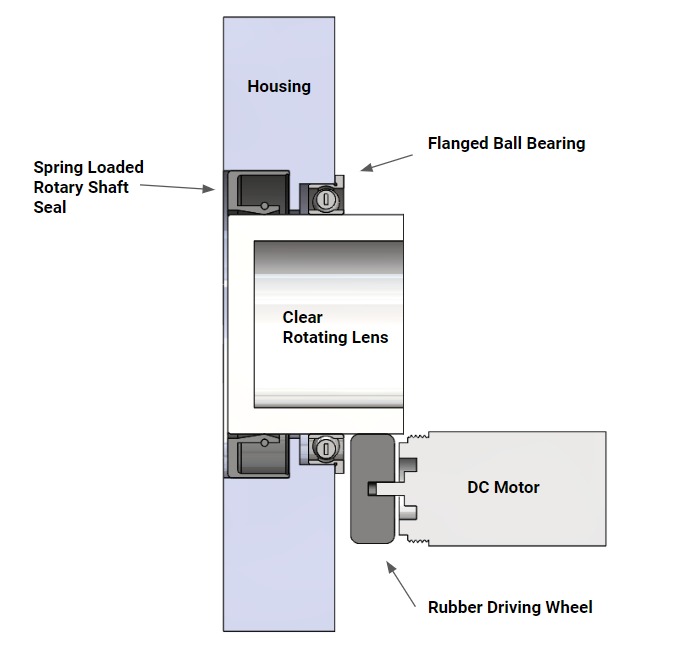
Rotating lens subassembly schematic.
-
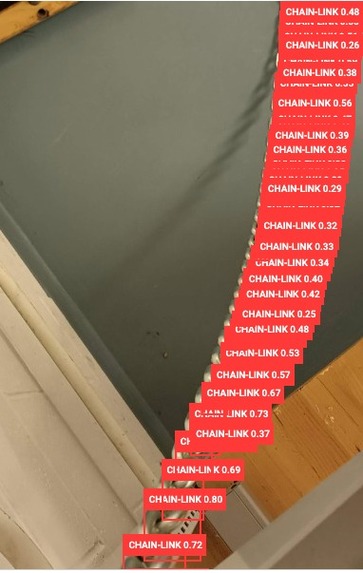
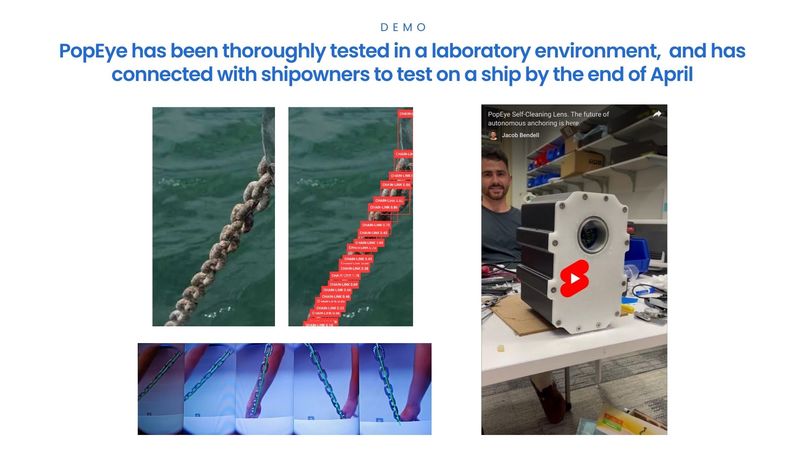
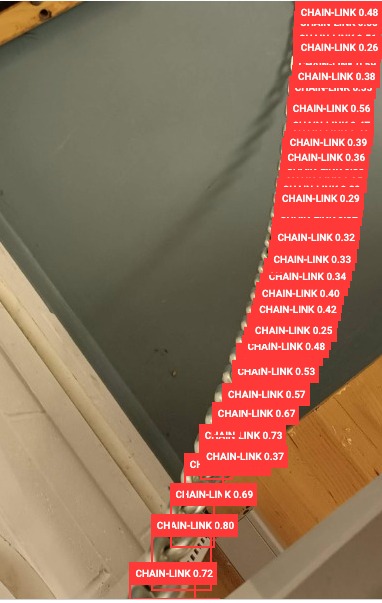
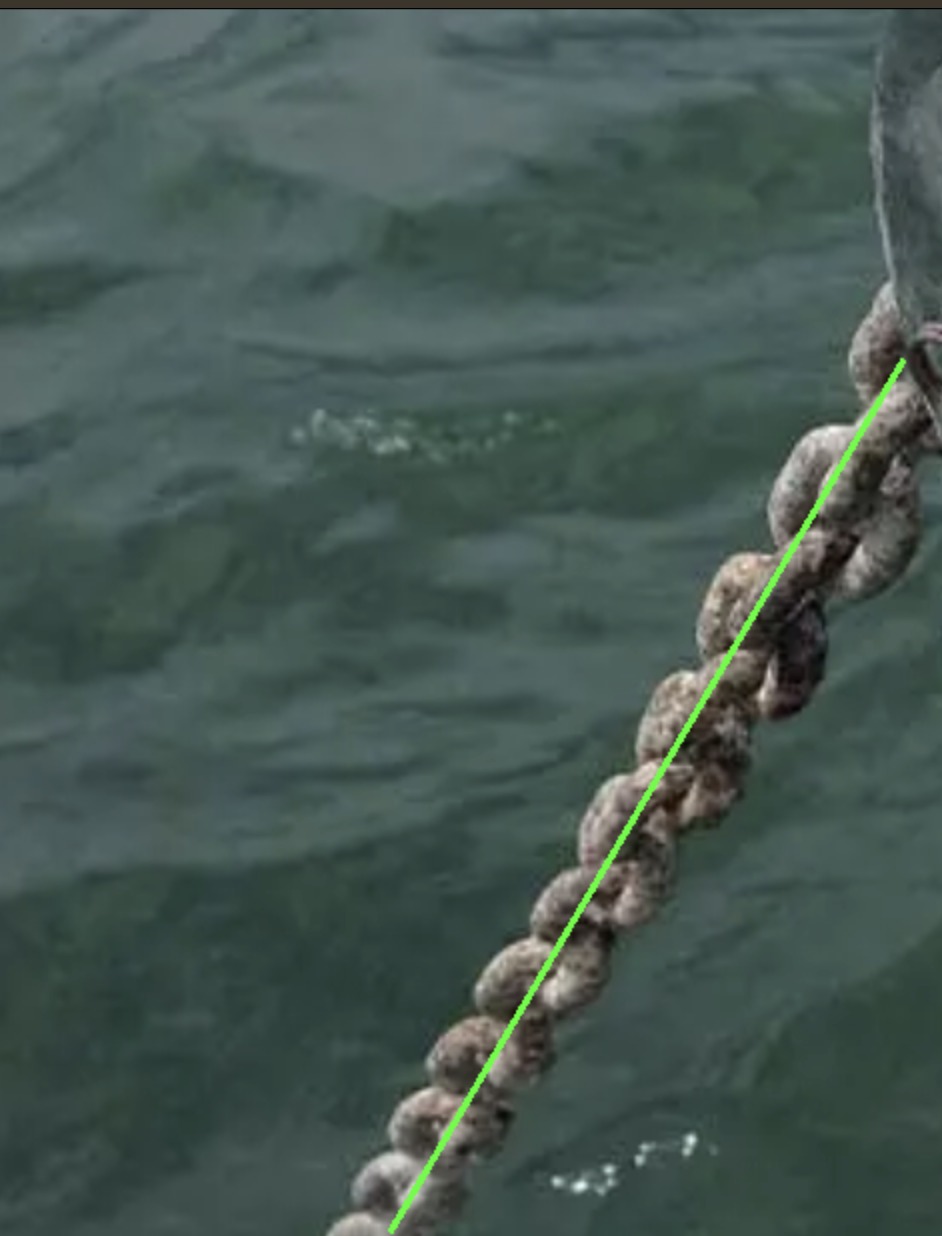
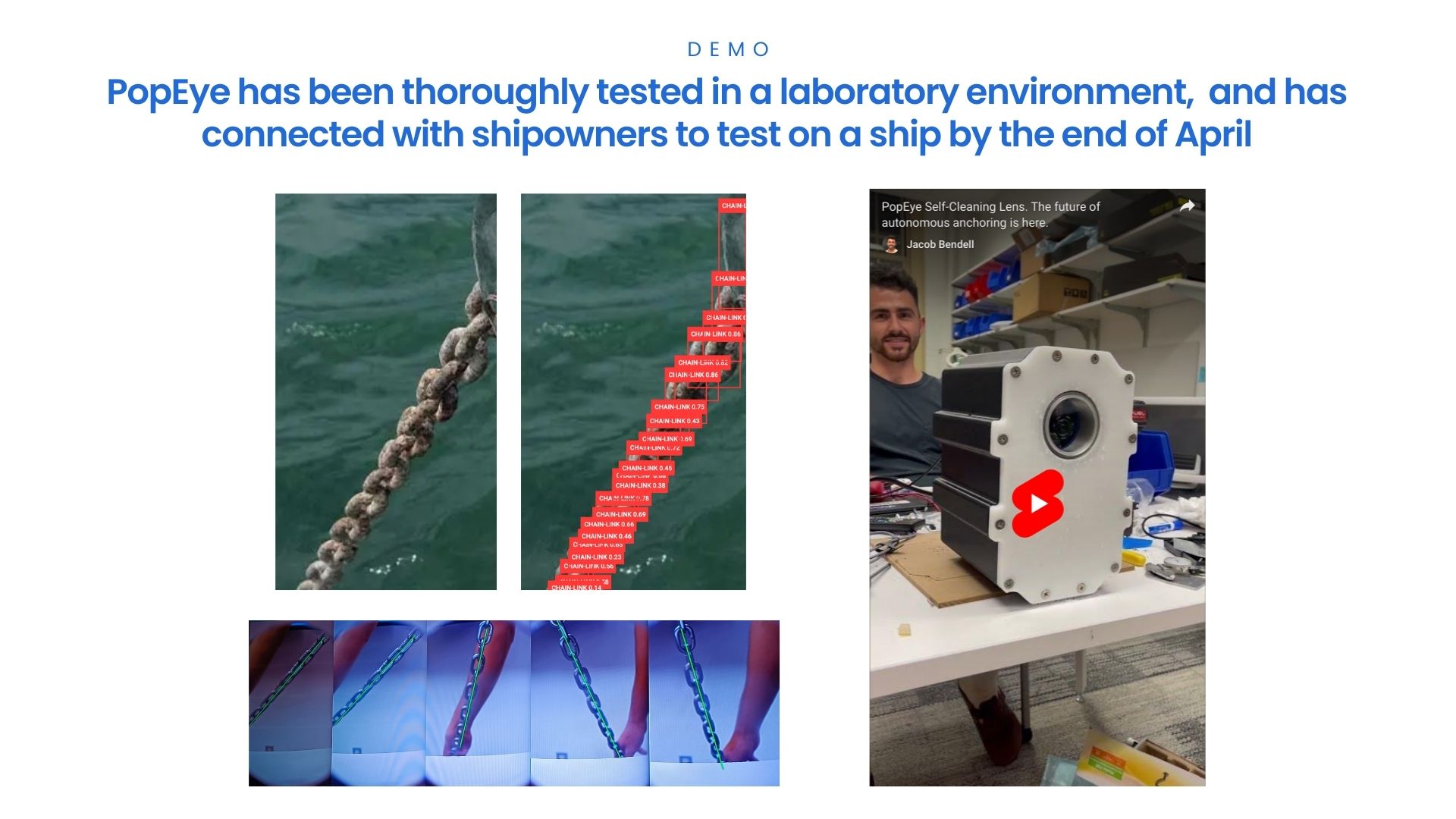
Chain link recognition.
-

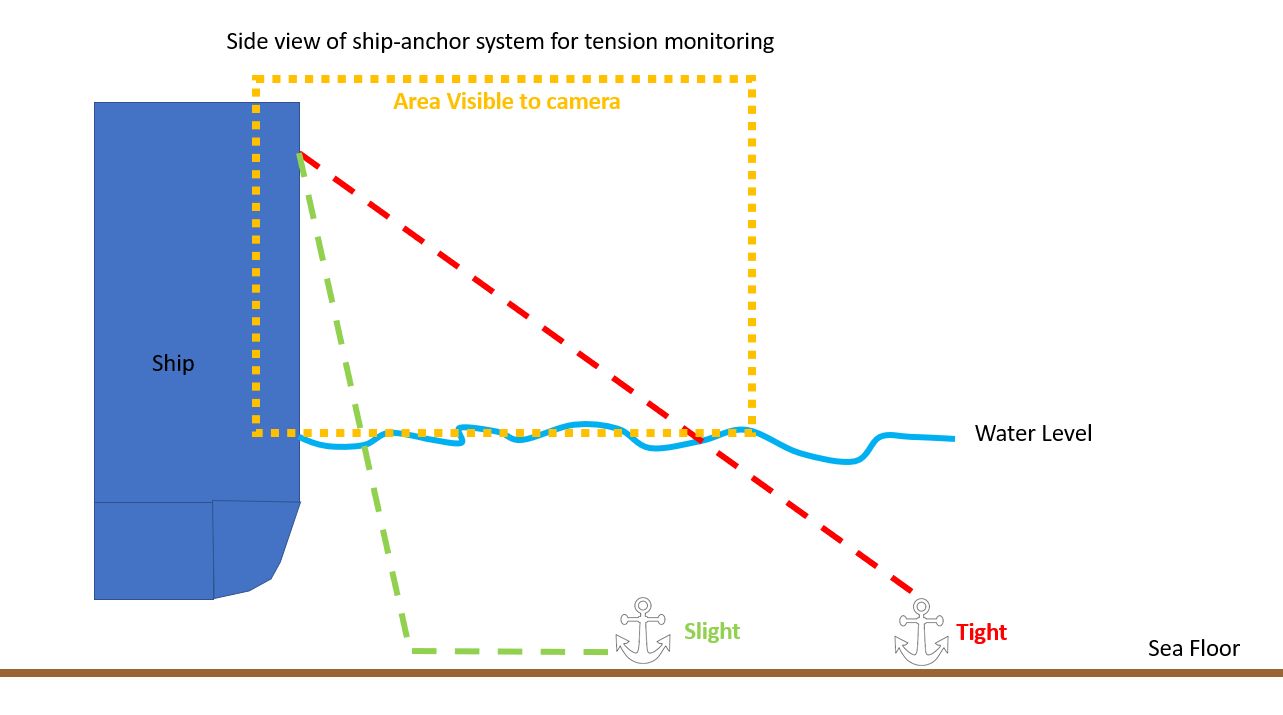
Chain tension recognition.
-
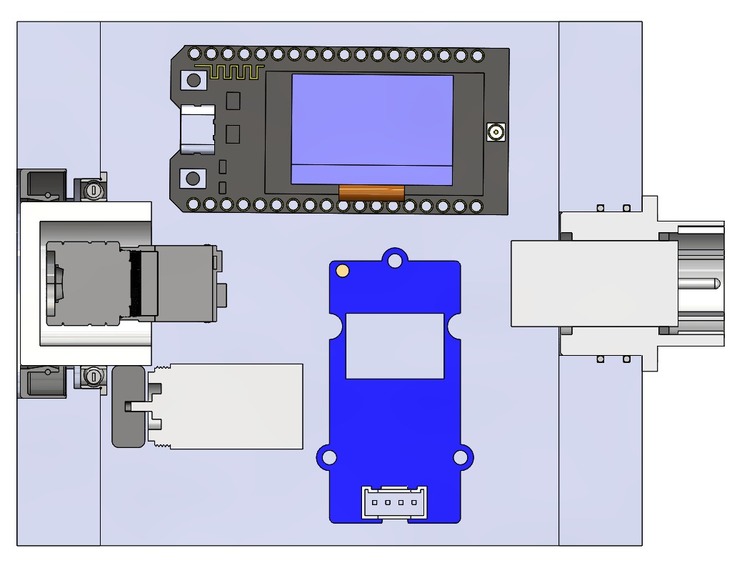
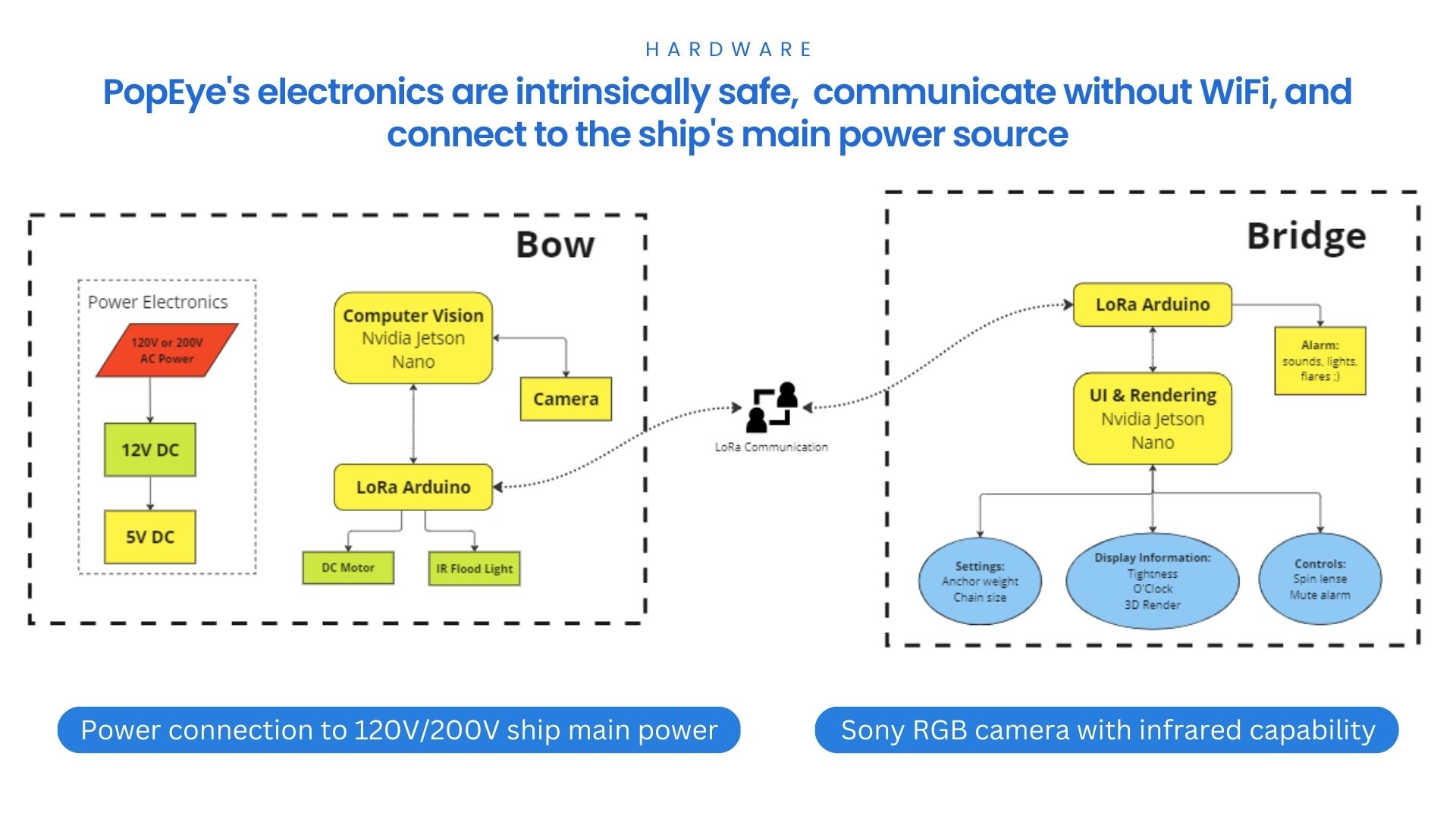
Electronics schematic.
-
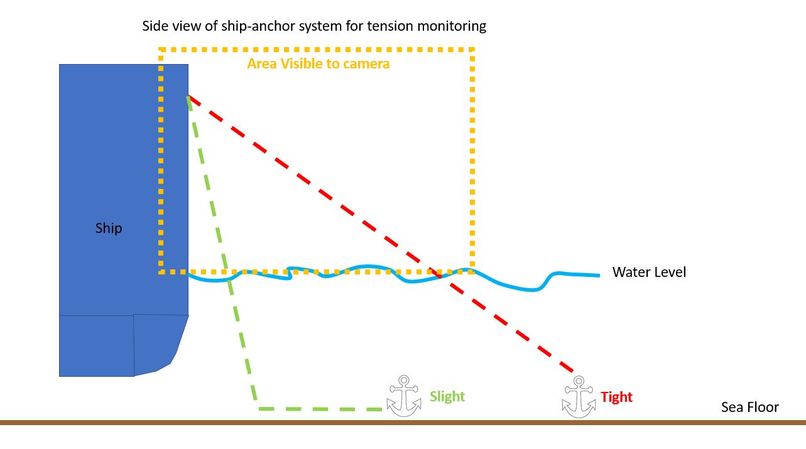
Rough estimation technique.
-
-
-
-
-
-
-

-

-
-
-
-

-

-
-

-
-
-

-

-
-
-
-

-
-









Inspiration
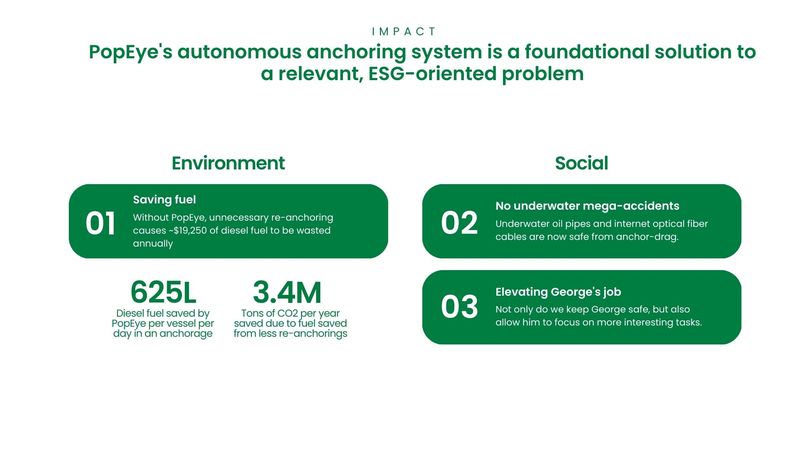
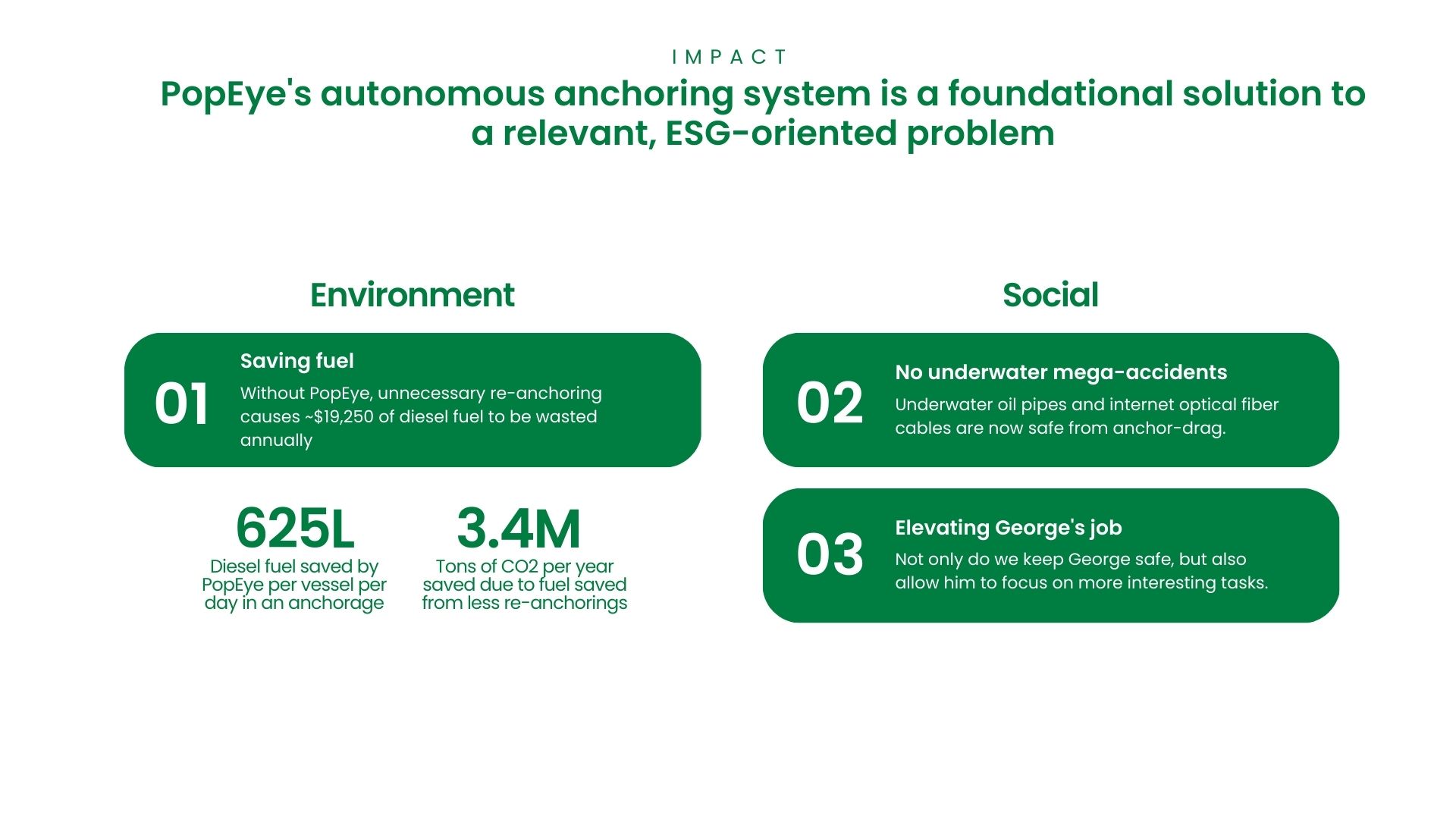
When the PopEye team originally came together to set a foundation for fulfilling this need, one of our key non-negotiables in choosing a path forward was centered on “impact”. PopEye’s ESG relevance and significance is undeniable.
A. Global Reach. This project directly targets the global commercial vessel fleet. With over 70,000 commercial shipping vessels (ship length greater than 500 feet) actively in service today, the repercussions of PopEye will be felt from the mid-Atlantic to Mariana’s Trench. Furthermore, PopEye has the capacity to expand into the recreational-use space. With this market expansion, PopEye’s customer potential figure exponentially grows into the millions.
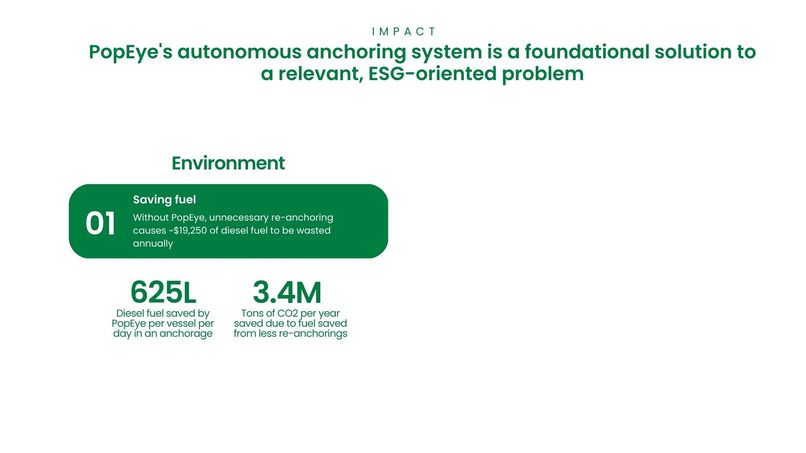
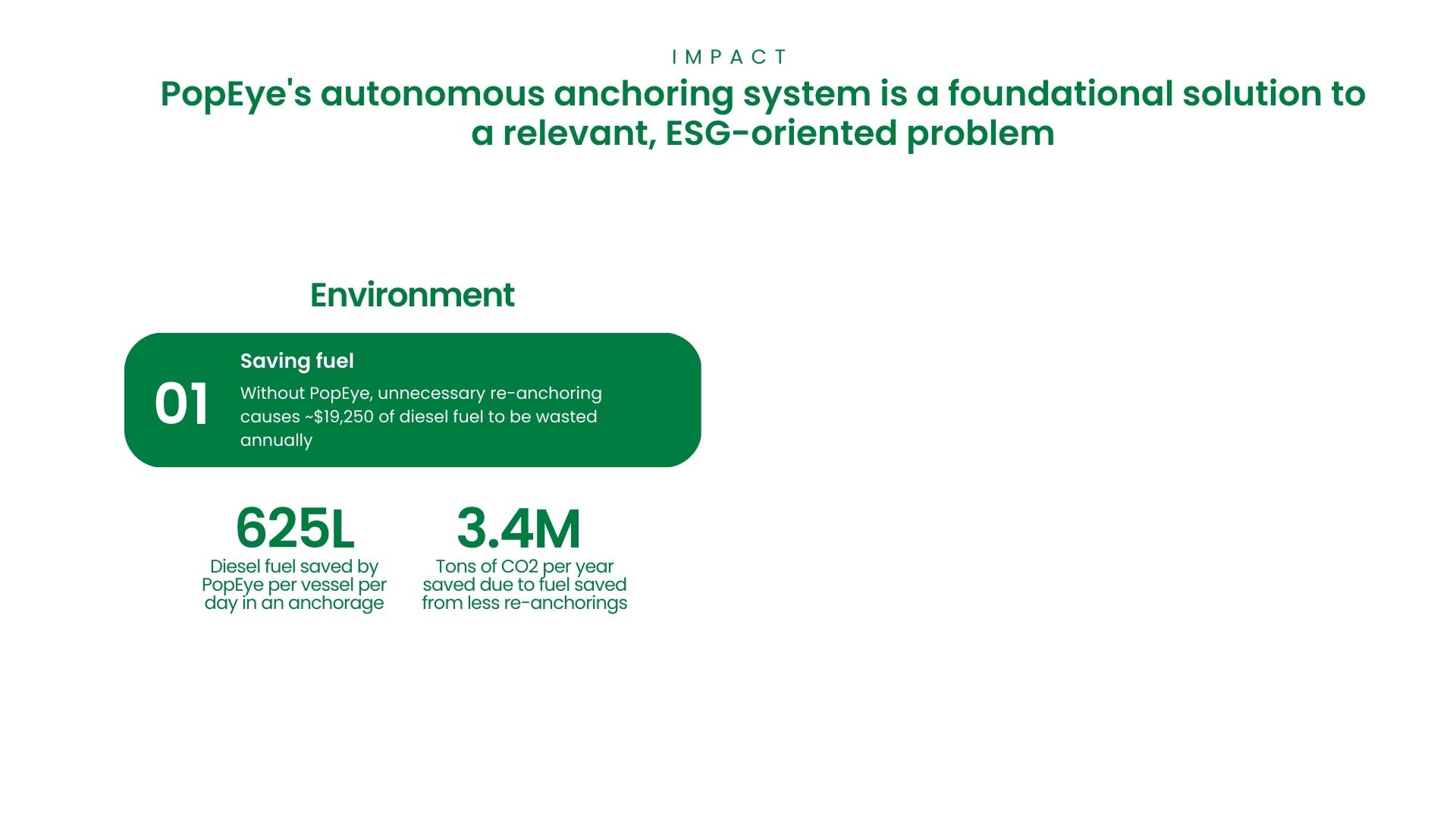
B. Environmental. One of PopEye’s main impact points is its positive effect on the environment. Anchor dragging accounts for over 6000 square kilometers of ocean floor damage annually. Moreover, one of every 100 commercial vessels loses its anchor annually. Even in its most elemental state, PopEye will directly counteract these two catastrophic situations.
C. Societal. Industry trends show that commercial shipping is mov- ing toward autonomy. From an efficiency standpoint, autonomous vessels offer both the most practical and safest solution to the commercial shipping industry. Autonomous anchoring is a key step in being able to achieve this autonomy, and a milestone that PopEye is directly contributing toward. Equally as significant, over 1900 non-fatal injuries occur on commercial vessels annually, of which a significant portion can be allocated to winch system operation, anchor- ing, and general deck malpractice. By moving away from subjectivity in anchor monitoring, and no longer requiring human operation, there is far less room for error.
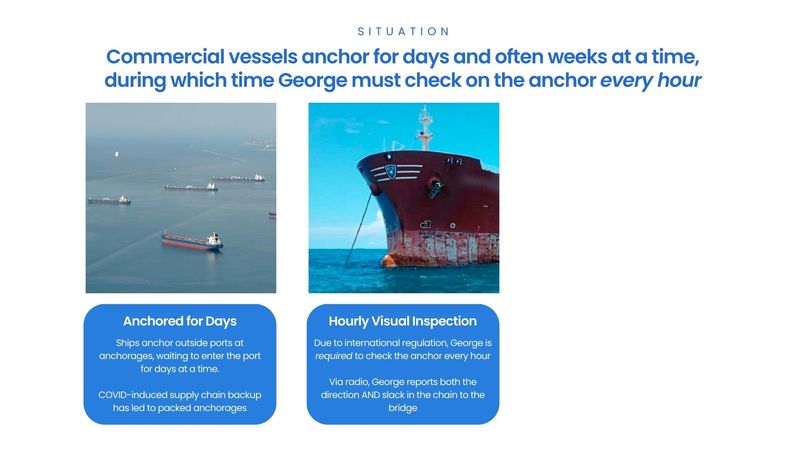
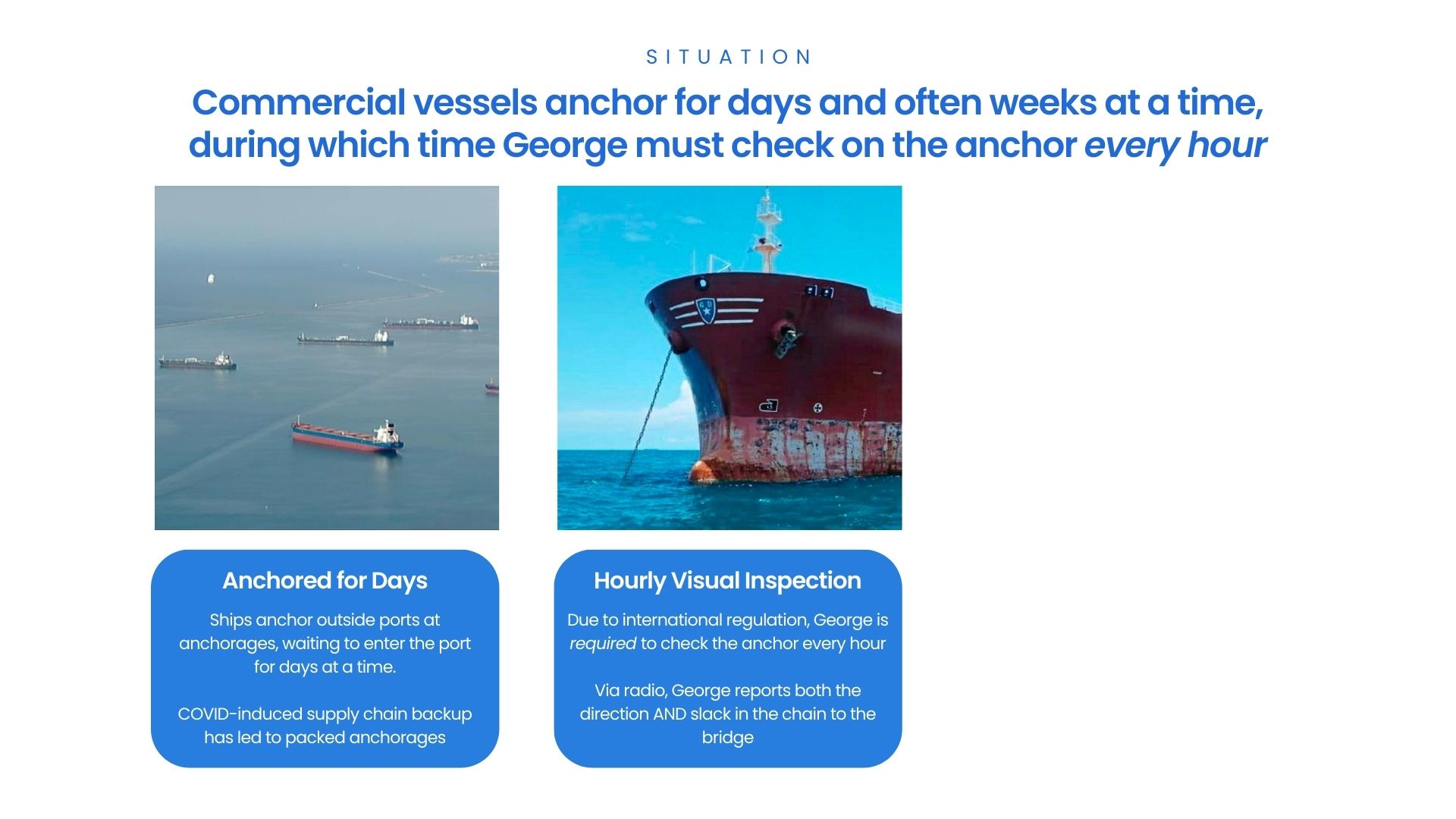
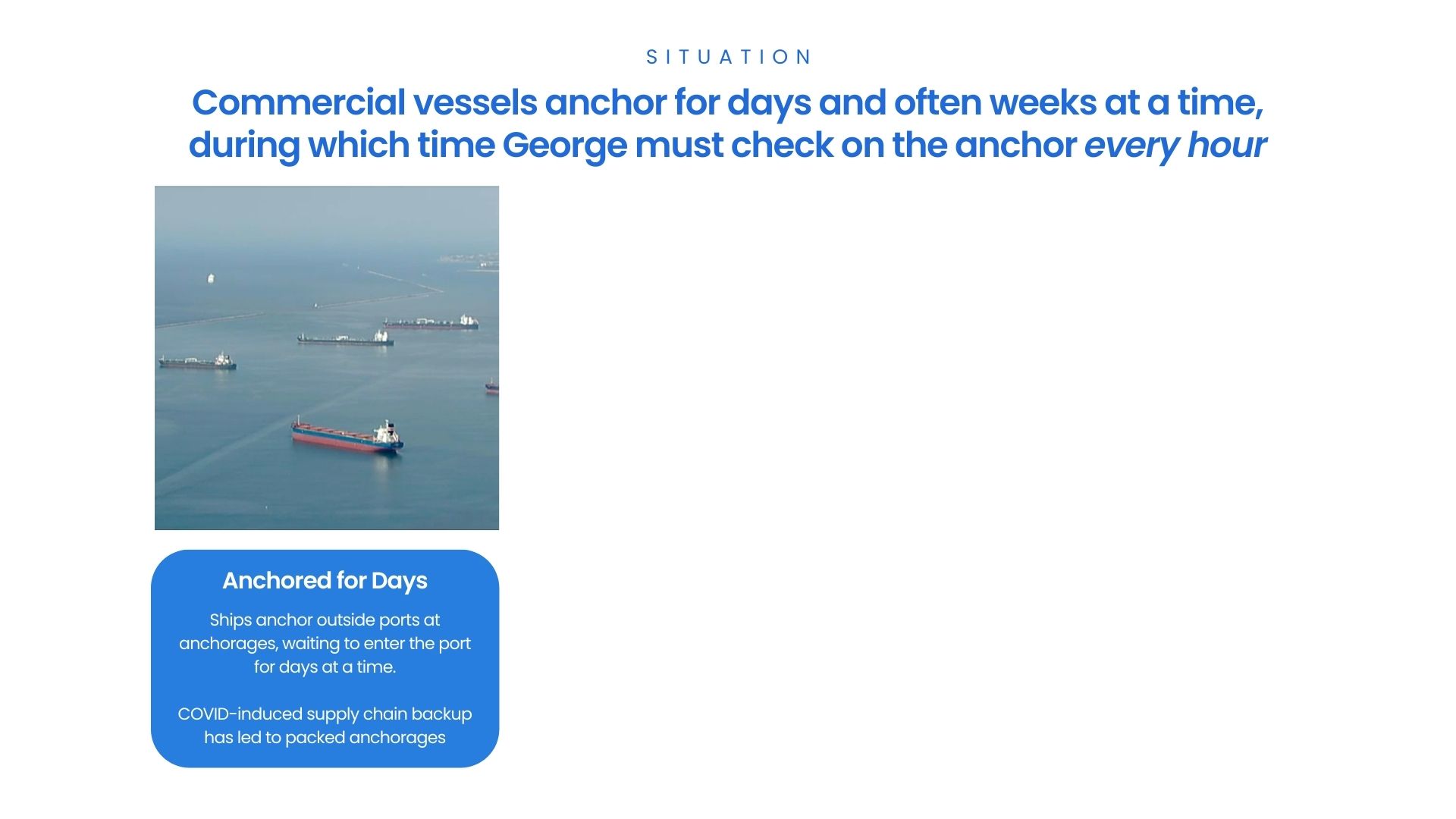
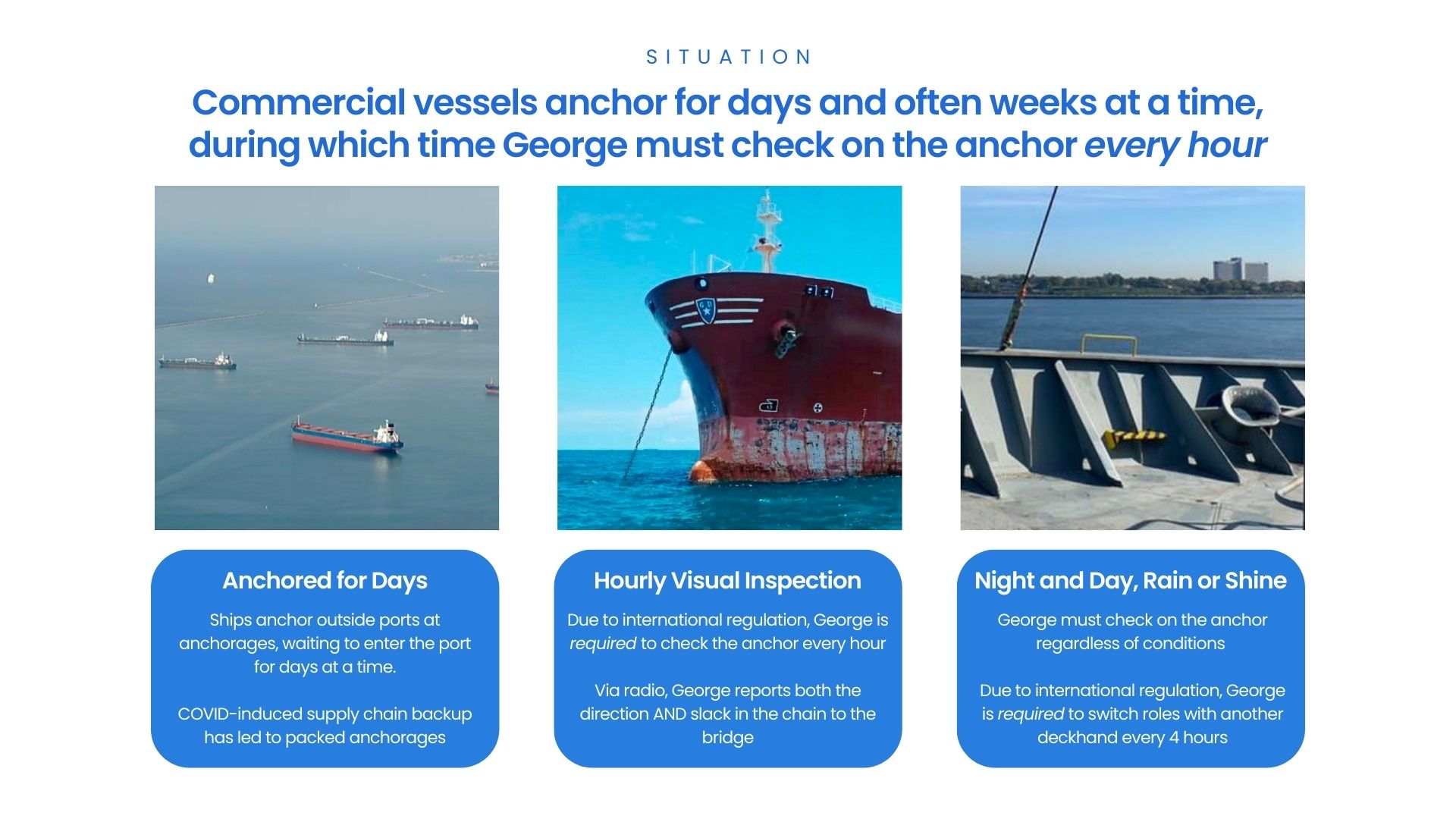
What it does
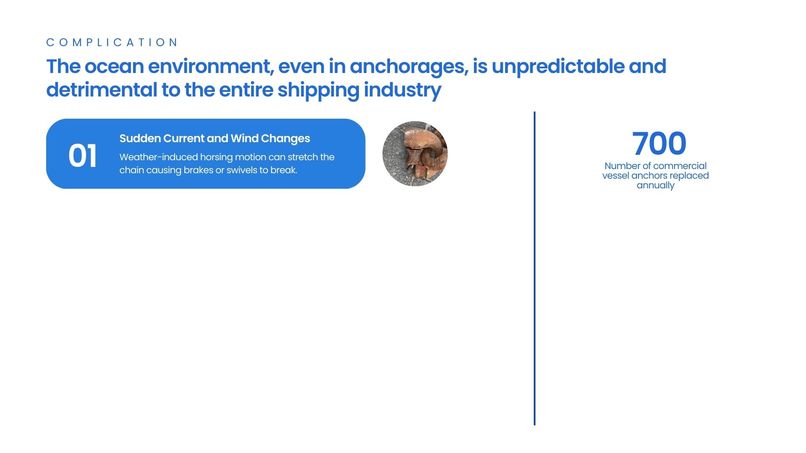
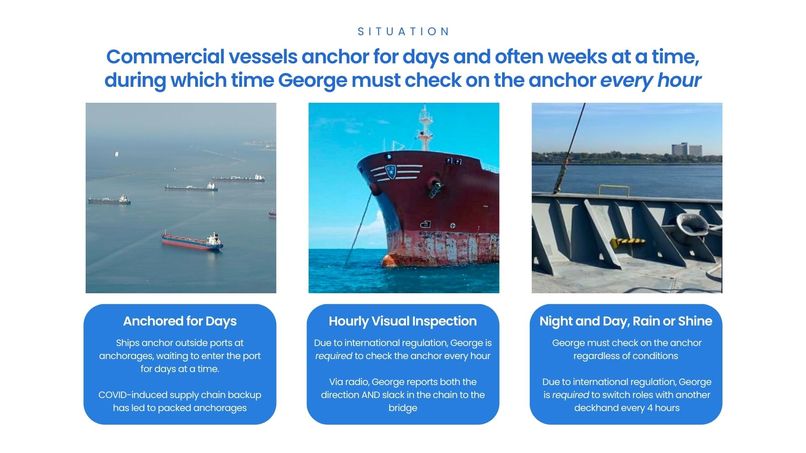
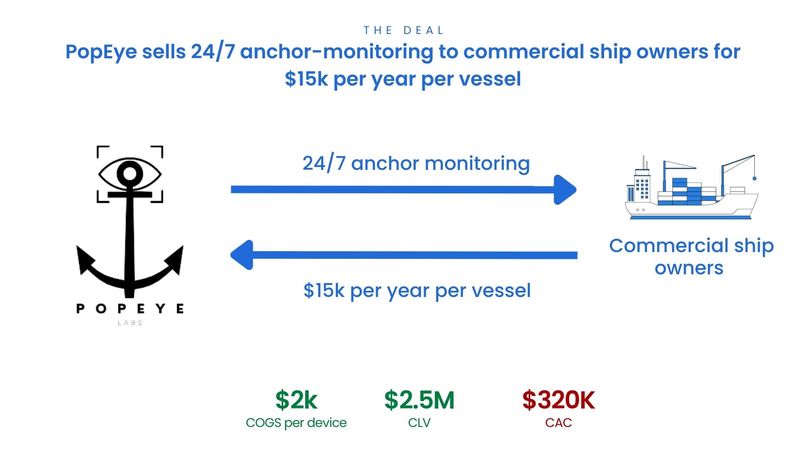
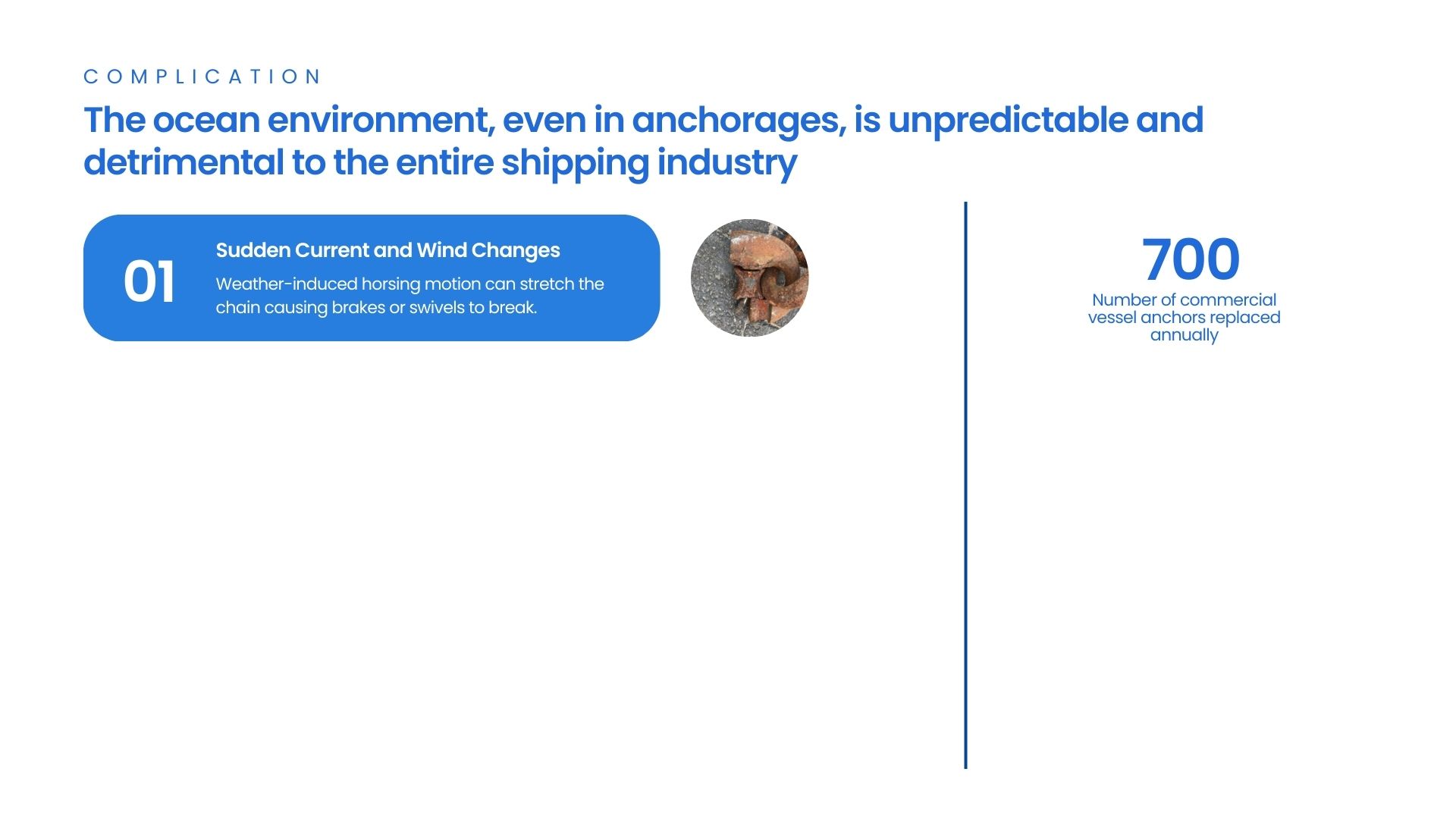
With 1% of the 70,000 vessel global fleet losing an anchor annually, and with a repair and replacement cost of $2 million per anchor, $1.4 billion is spent on anchor loss every year. Put simply, anchor loss and malfunction is a billion dollar problem. Before docking at ports, large commercial vessels anchor at the local anchorage, often for days and weeks at a time. While anchored, the typical holding power of the ship is 90% a product of the chain's friction on the seabed and 10% the actual anchor’s hold. During that time it is internationally regulated that an on shift deckhand, who we like to call ‘popeye’, must walk to the bow of the ship at least once an hour to inspect the following:
- The direction the chain is facing
- The slack in the chain (indicating chain tension)
- Whether the chain brake has failed
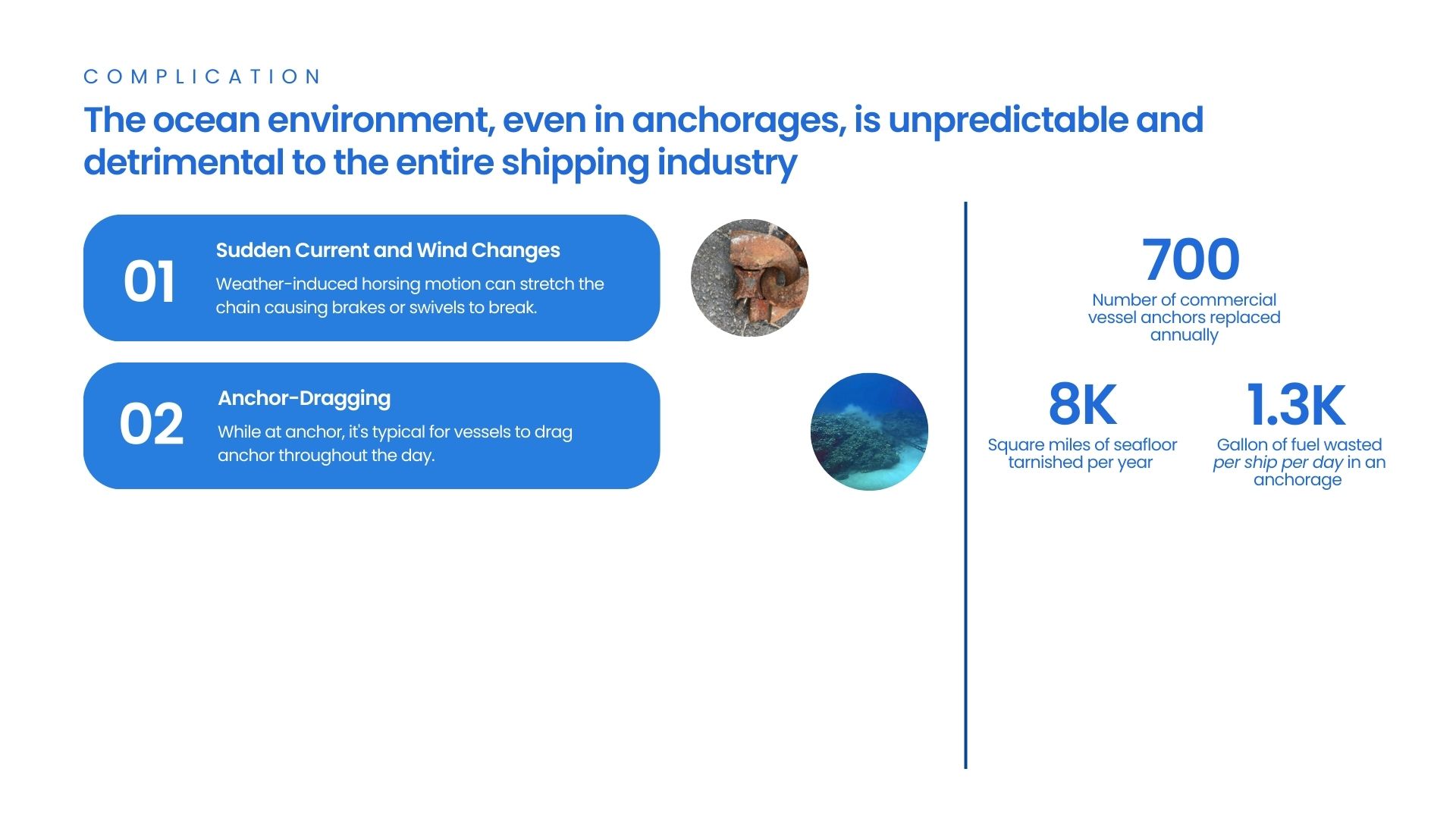
Of course, as can be expected, an abundance of things can, and do, go wrong during the time between ‘popeye's’ hourly inspections. First, weather-induced horsing motion of the vessel can cause the tension of the chain to grow so large that the swivel between the chain and anchor at the bottom of the sea fails. The same motion can cause failure in the windlass brake on the ship. In either scenario, the vessel loses its anchor and faces a $2M replacement bill. Second, due to invisible and undetectable currents and gusts of wind, chain tension increases, causing the chain itself to be lifted from the seabed. This reduces friction on the surface (i.e. holding power), resulting in the whole anchor-chain-ship system to drift. Unfortunately, once a vessel starts dragging, it takes proper intervention to stop. An unexpected and unnoticed dragging vessel can do all of the following:
- Damage nearby vessels at a busy anchorage.
- Exit the anchorage and damage oil, internet underwater pipes.
- Wash ashore.
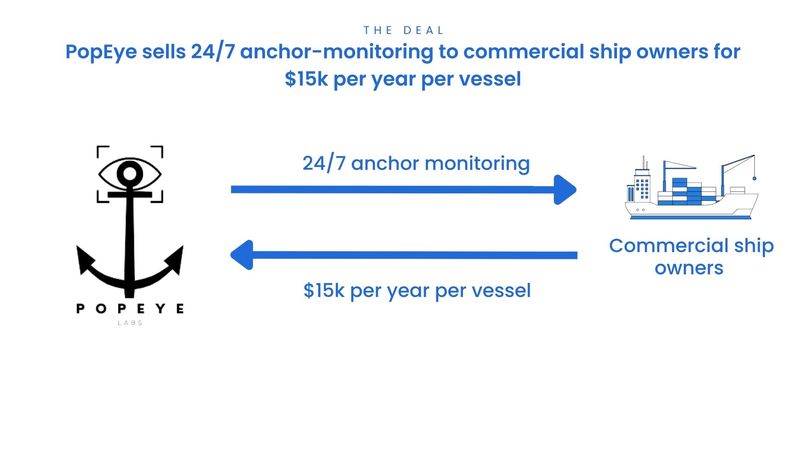
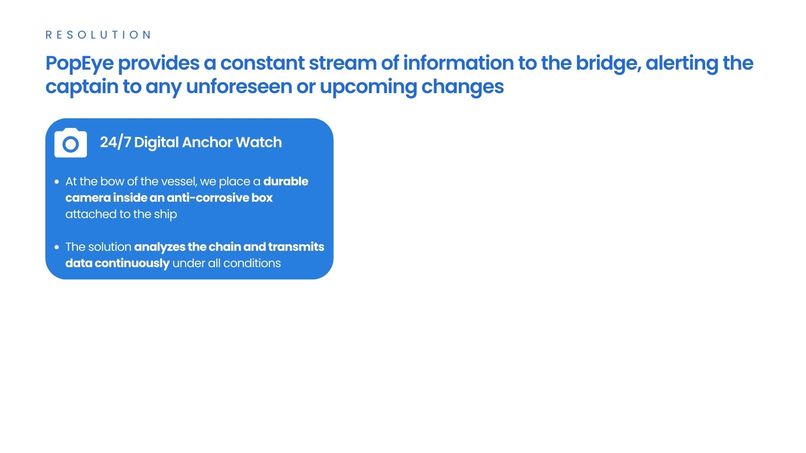
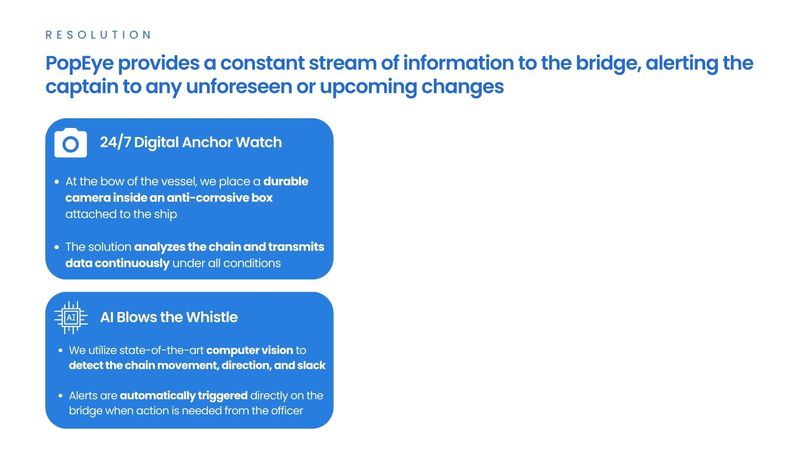
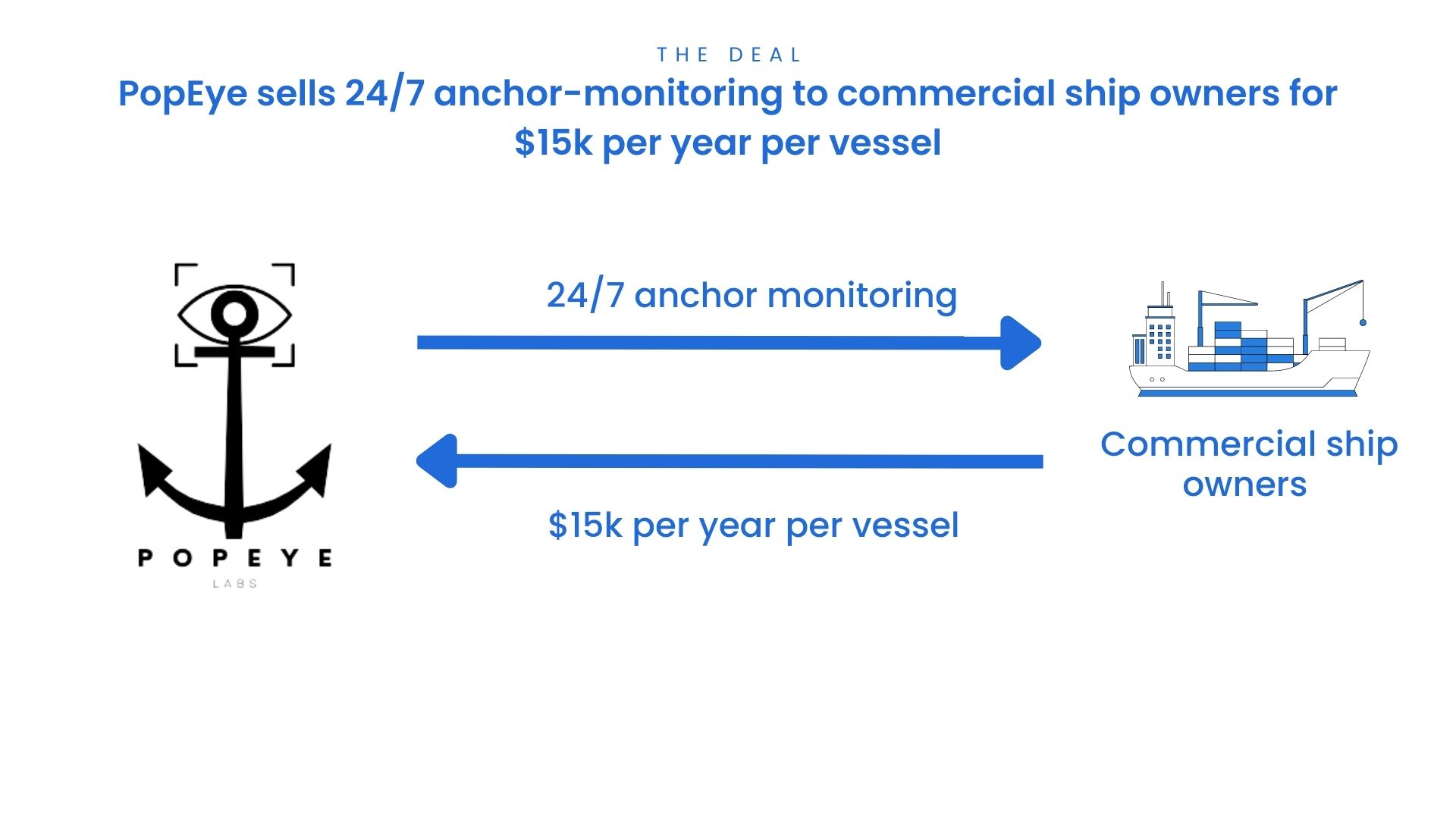
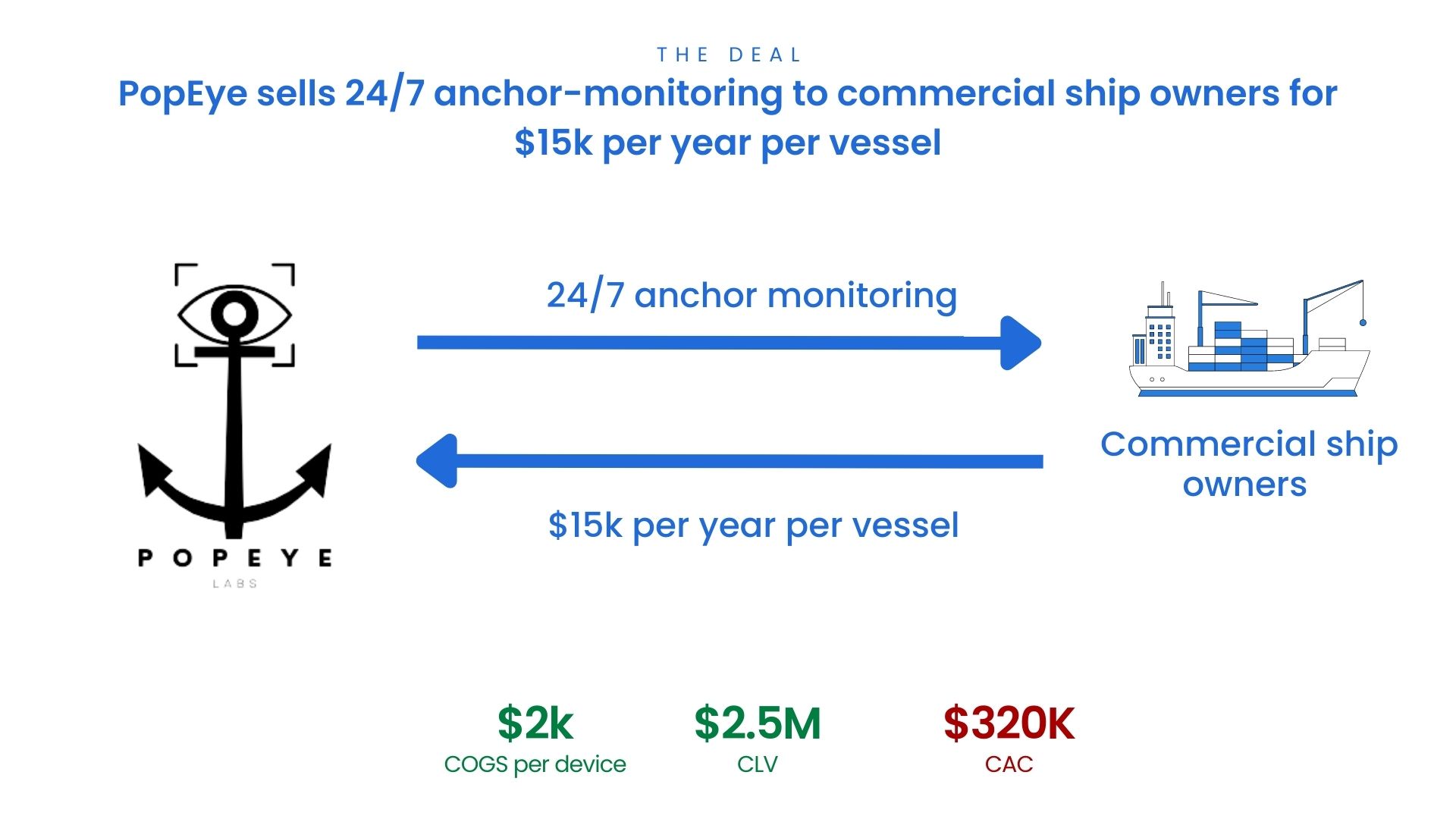
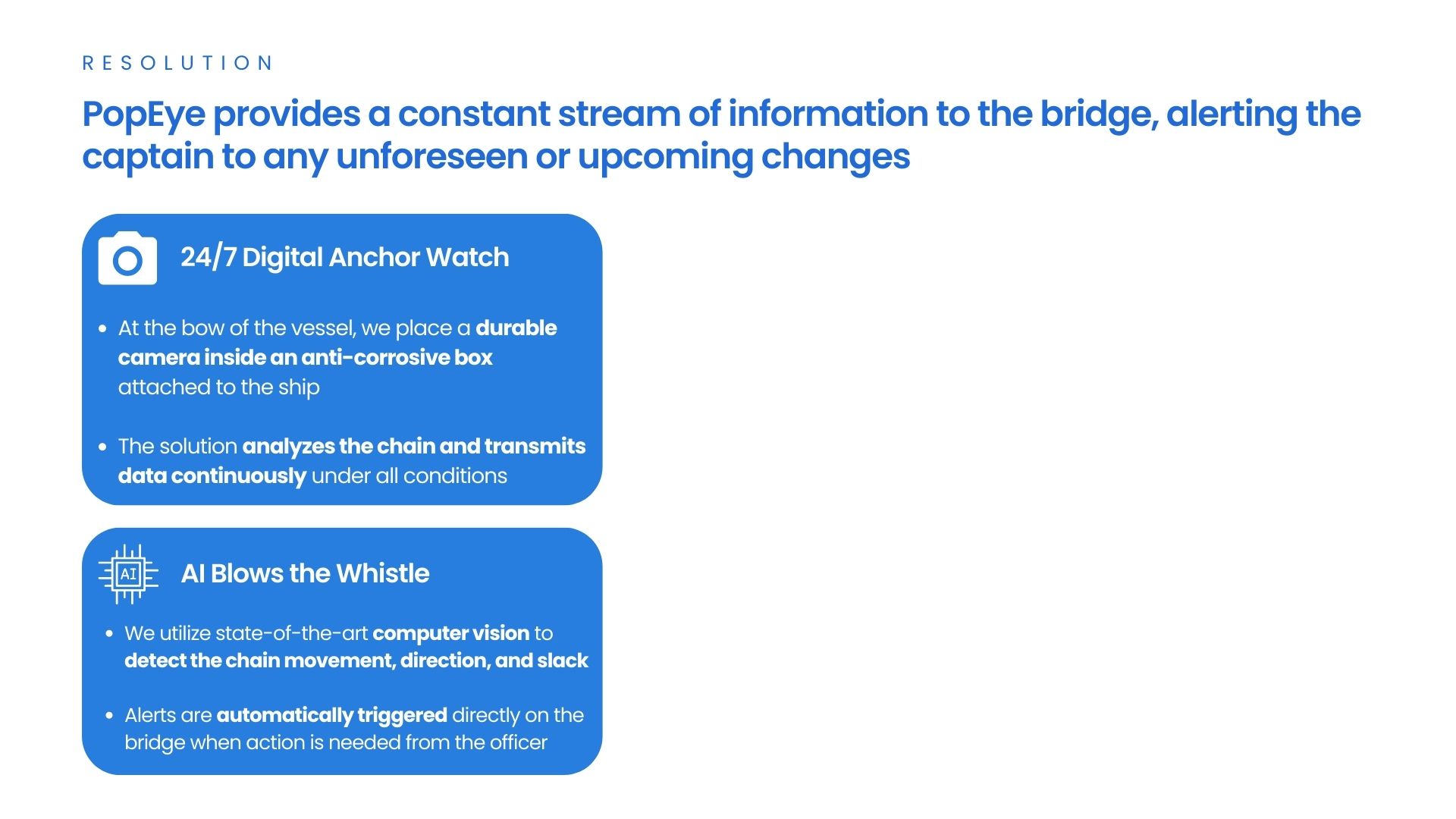
Our project, PopEye, proposes automating deckhand ‘popeye's’ task by creating the world's first 24/7 anchor monitoring system for large commercial vessels. By utilizing state of the art computer vision technology, and latest advances in mechanical design, we have designed a novel camera-in-a-box solution that operates against the ocean’s most difficult conditions. The system offers a constant, objective stream of information, and peace of mind in the form of risk prevention to the ship owner, the ship manager, the ship operators (captain and crew), the ship's insurance company, the port authorities, and even the coastguard.
Current trends unanimously show that the whole shipping industry is moving towards autonomy. Yet, one of a ship’s most important abilities, anchoring, remains manual even in the latest autonomous vessels. PopEye is the first step in automating the anchoring process.
Why us
The PopEye team recognizes that people define success in the startup space. When we formed the team in May of 2022, we didn't know exactly what problem we'd be solving, but we knew that this was the team that could make it happen. When we came across this niche need in the commercial shipping space, we couldn't have had more ideal backgrounds to develop a solution. Three mechanical engineers, Mario, Ben, and Nick tackle the invigorating task of building a 'camera-in-a-box' solution that can survive Earth's most difficult environment-- freezing cold seawater. One electrical engineer, JD, defines the electronics in the body, and ensure that we have the power needed to operate. Finally, one computer scientist and robotics master, Orestis, focuses on developing the novel computer vision needed to relay the appropriate information to the ship's captain.
How we built it
Mechanical Design
Fog, Frost, and Droplet Resistance. A key success factor for the correct operation of the device is its resistance to fog, frost, and droplets, as they directly affect the precision and reliability of the camera and computer vision. In order to mitigate that, the team came up with an innovative and unique solution shown in the schematic below.
The main idea is that the camera will be enveloped by a heated, rapidly spinning clear cover, that allows droplets to fly off and fog to be dissipated. In order to achieve this, the spinning cover will be housed with a flanged bearing and a custom rotary shaft seal that allows the cover to be spinning and waterproof at the same time. The shaft seal is essentially an extruded O-ring, with the addition of a spring in the concave section, that keeps a tight seal against the elements.
The spinning cover will be rotated by a DC motor with an elastomer wheel contacting its surface, which will be housed with appropriate pre-tension in order to transmit the optimal amount of torque to overcome the bearing and shaft seal friction. Although the current plan is to use this elastomer and DC motor, we are continuing to test the durability of this design, and it may be subject to changing. Other ideas which we have considered include a ring gear, which would allow for a potentially more robust design. The potential difficulties regarding a ring gear include machining, as well as overall noise. Options to add cover heating will be explored in the prototype stage this spring. We anticipate the design following a similar design as that in the rear windows in a car, where there is resistive tape that creates a heated lens.
Enclosure. In order to ensure that our device can withstand the harsh conditions it will be exposed to, it is essential that the enclosure is designed and built with these challenges in mind. The enclosure must be able to withstand salt-water corrosion and long periods of water submersion without failing or malfunctioning. Therefore, testing will be crucial. In the spring semester, we plan to create a testing rig which will allow us to subject our design to all types of environmental exposures.
With respect to enclosure materials, we have done extensive research and analysis of both metals and plastics, ultimately leading us to a classic and personal favorite: Delrin. This material is easily manipulated, will provide a strong and sturdy base for the device, and will be protected from the elements using appropriate coatings to prevent corrosion. In addition, waterproof connectors and O-rings will be used to guarantee proper cable management and prevent water from entering the device
Assembly. To guarantee ease of assembly and maintenance, the team designed a top-down assembly, where the enclosure can be taken off and the electronics exposed easily. This results in a slightly bigger overall assembly, but a better maintenance experience, which may very well drop the opportunity cost for a lot of customers. This was an important consideration when designing the enclosure as the device must be reliable, given its importance on the ship. Therefore, if malfunctions were to occur, they must be fixed swiftly.
Computer Vision
PopEye will employ computer vision to gather the data that today manual inspection gathers, as well as provide additional information.
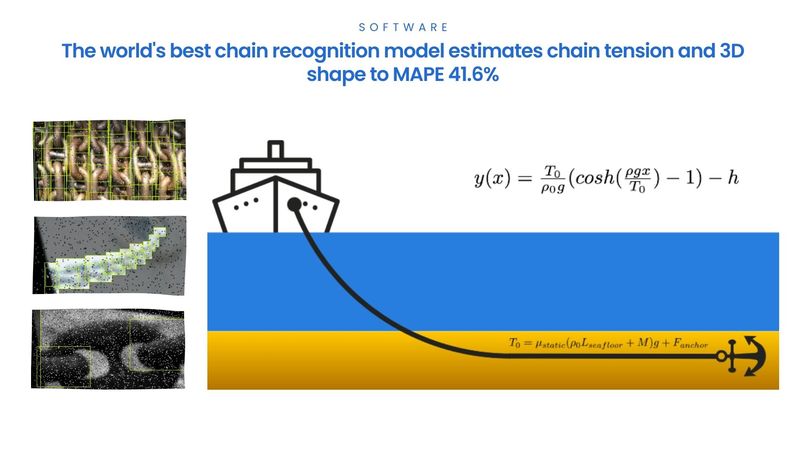
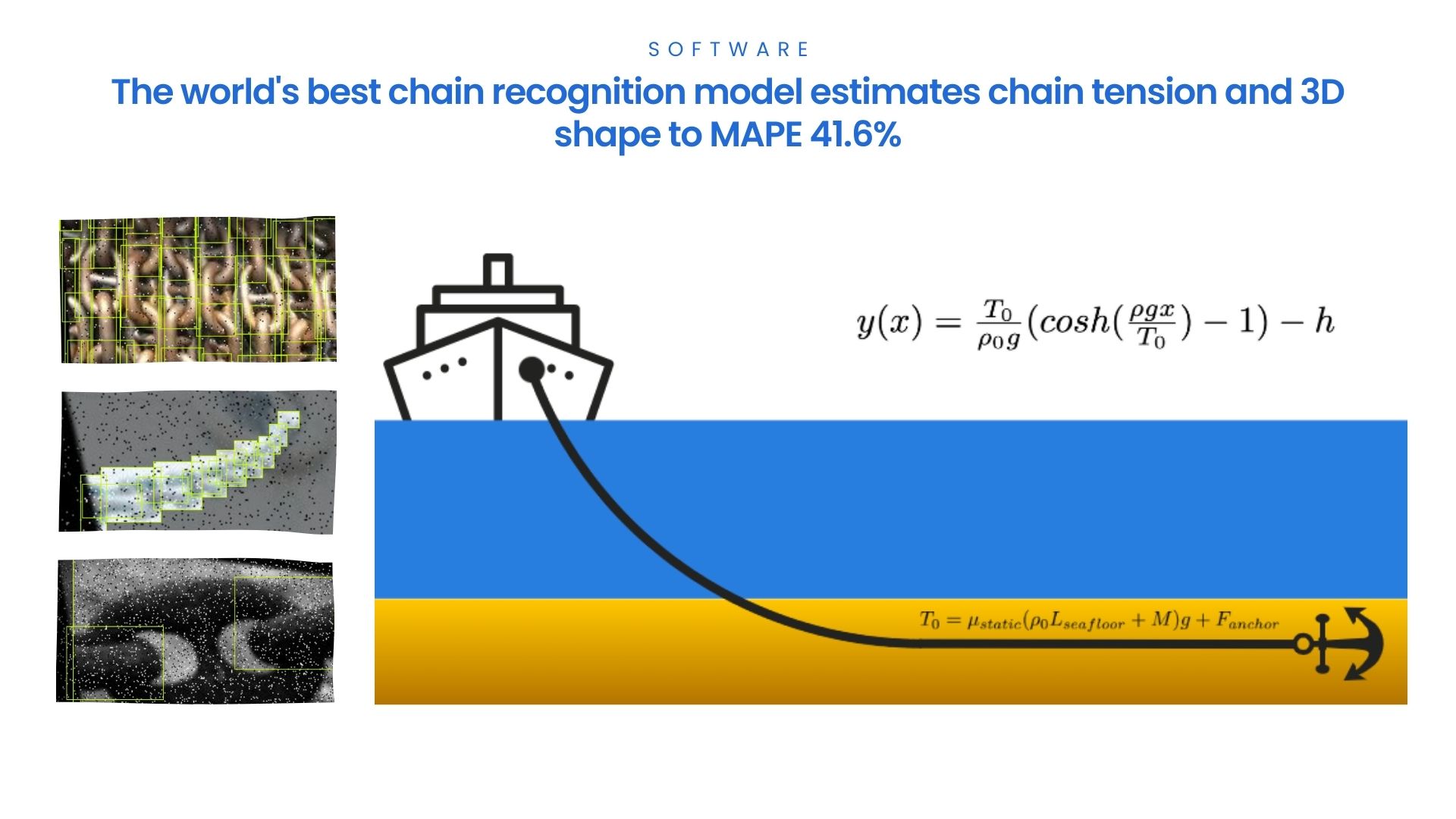
Architecture. Using YoloV5, we train our neural network on 5,000 manually annotated images of chain links. Through this process, our model learns what a chain link looks like. Then, the already trained model is deployed to run every second using the footage from our cameras. Extracting the location of chain links, we then filter the output to make sure that links actually link to each other (a false positive link detected not inline with the other links, will be disregarded) and we geometrically calculate based on the number of chain links we see how far off the ship the chain meets the sea. As a final output, we get the direction the chain is facing (o’clock) from the ship, as well as the strain (how far from the ship the chain enters the water).
Estimations. From knowing the tension, direction and GPS location of the ship at every second, as well as how much chain has been paid out (we count as it goes out), we can calculate the shape of the catenary as well as how much chain lies in the ocean floor. In addition, since we know the GPS location of the ship, as that changes, we can estimate the friction coefficient of the particular anchorage and thus be able to predict when a ship is about to drag, before it does so.
Visual Equipment. Our system needs to be able to see through fog, rain, snow, blizzards, blazing sun, sandstorms, night, and any other adverse weather conditions that exist at sea. As a result, we are using a 1.5μm Infrared camera that is able to see through most of these circumstances, even better than a human eye.
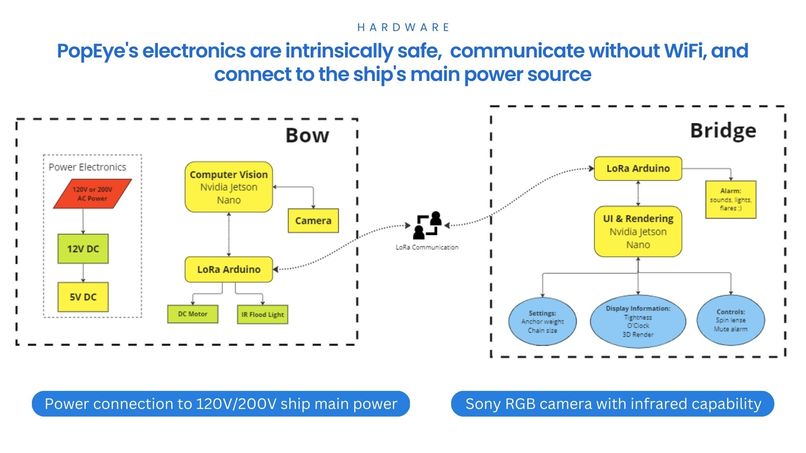
Electronics
Power to our device comes from the ship, where during installation we set up the 120V power supply. Our electronics and power supply remain waterproof due to the weather-proof casing that surrounds them. A powerful microcontroller uses TinyML principles to run the deployed computer vision model and the GPS module on the circuit with its antenna provides us with the ship’s location approximation.
Heating. Due to low temperatures, we will be constantly providing heat to the whole device and outside casing. This is important so that our camera can function properly and there’s no ice formed on the outside of the device preventing the rotating lens and GPS functionality.
Challenges we ran into
As far as challenges are concerned, fortunately PopEye tends to solve more than it presents. The two main challenges that PopEye has run into thus far are:
Component Failure – as is the case with most high-impact products and services, if PopEye were to fail or misreadings were to occur, the resulting damage could be catastrophic. Autonomizing the anchor-watch is ‘no joke’; an entire vessel is dependent on that anchor holding and the captain knowing exactly what state the anchor is in. Furthermore, if the product’s enclosure fails, the entire system has the potential to dispatch into the ocean, creating a hazardous environment for
Job Replacement – at the end of the day, PopEye is replacing the anchor-watcher’s role. Albeit, in a safer, more efficient, and more effective way, this still has the capacity to disrupt what is typically a pillar within the commercial shipping crew.
To resolve these ethical concerns, we are pursuing a variety of solutions:
Component Failure [Resolution Options] – every aspect of our design prioritizes functionality and durability. Through excessive hours of testing and literally thousands of image analysis PopEye will be able to guarantee accuracy, rain or shine. Furthermore, the PopEye system is built to last, and as a team we’ve made a point of prioritizing product quality over trying to dwindle down our COGS. As such, we’ve invested only in electronics and materials with the capability of surviving one of Earth’s most difficult environments: saltwater submersion.
Job Replacement [Resolution Options] – fortunately, though this is one of their most important, the anchor-watcher (or deckhand) has an abundance of other responsibilities that requires their constant attention. Therefore, because this is not a direct like-for-life alternative, we don’t expect to have issues with worker’s unions. If anything, PopEye resolves one of their more difficult and dangerous tasks.
Accomplishments that we're proud of
Team formation. Curating this team and it's advisor was absolutely pivotal and can often be overlooked. The group wasn't built on the backs of pre-existing friendships, rather our professional work and experience led us to one another over the course of a two-month period in the fall of 2022.
Development partnership with the US Coast Guard. The team's biggest initial concern was the ability to test on relevant vessels. Through Penn connections, we found a Coast Guard captain willing to 'hear our pitch'. A few conversations later and we were invited aboard a major vessel at the USMMA. Now, we have an invitation to the Coast Guard headquarters in Washington DC to collaborate on product development.
Finalizing our working MVP. Of course, actually building a working product is the most important thing we can do. PopEye's finalized MVP is capable of fully comprehensive, autonomous anchor-monitoring.
Invitation to present at the CMA. Obtaining LOIs and garnering interest from existing customers is the final hurdle this team faces. Being invited to present at the CMA at the end of March, in front of thousands of major shipping captains, is a fantastic opportunity for us to connect with those customers. This is where the money is.
What we learned
"I had to teach myself how to train a state of the art computer vision model with new images, something I hadn’t done explicitly on my own before. It’s amazing to see things taking shape, working, and learning so many tools in the process. In addition, it’s fascinating trying to learn more about the entrepreneurial process and having conversations around product market fit." Orestis Skoutellas
"I had to teach myself about redundancy. In class, we usually learn how to make things work once, rather than how not to fail once. Thinking about products, instead of prototypes, is useful in placing barriers and making structures fault tolerant. Product development has been the real highlight in terms of learning about this." JD Bendell
"On the business side, I’ve had to teach myself how to really sell in conversations with VCs and angel funds. With this, obviously, comes advanced business analysis skills that have grown on top of my consulting background. On the mechanical side, the biggest learning curve has come in feasibility analysis (from a material and mechanical standpoint). Operating under the saltwater submersion condition is actually extremely difficult and requires a greater breadth of knowledge in choosing materials and mechanical processes." Nicholas Anderson
"So far, I have been focusing on the product development / mechanical design aspect of the project. I have had to teach myself about the specific standards surrounding the maritime industry as well as the materials used in such an environment. Given our approach to use an actively rotating seal, I am still learning about the mechanics behind this design decision, specifically regarding how it will uphold our goal standards as well as the lifetime of such a product. In the coming weeks, I anticipate material selection for our new MVP to be of high concern and I will be likely doing a very deep dive into better manufacturing practices. As of now, I have learned a lot, but there is tons more for me to do." Benjamin Abt
"Throughout the process, I have utilized my knowledge and expertise in mechanical engineering to help drive the project forward and ensure its success. This means I have had to brush up on a lot of engineering fundamentals, such as heat and mass transfer, thermodynamics, fluids, and machine design to meet the design goals. I did not expect to touch the computer science and electrical parts of the projects, but have had to integrate it into my own mechanical work-- integration being a steep learning curve in itself." Mario Ferre
What's next for PopEye
Looking ahead, we have the arduous task of testing as much as we possibly can, and iterating to create a reliable and impactful product for all commercial shipping vessels. We will also continue the development of our business with the ultimate goal being to have multiple letters of intent and even a signed contract for PopEye’s system by the end of April and our meeting at the USCG headquarters.
The biggest challenge to be faced on the engineering front involves the durability of the product in its incredibly challenging environment. We expect to learn vast amounts about our system and make almost an entire overload of changes when we actually get the system on board an active vessel. We will confront this by (a) simulating the environment to the best of our ability (taking it out to the Schuylkill, Pottruck, etc.) and (b) testing as early and often as possible with the USCG.
Finally, the PopEye team is excited to continue with the development of its business model, and has applied to various competitions and grants, and spoken with a handful of interested VCs. As of today, we are still involved in the University of Pennsylvania's President's Innovation Prize, VentureLabs Startup Competition, Atento Pitch Competition, and UPenn M&T Summit Competition.
Built With
- solidworks
- yolov5



Log in or sign up for Devpost to join the conversation.