Inspiration
This project was actually built for deCONSTRUCT Hackathon 2014.
What it does
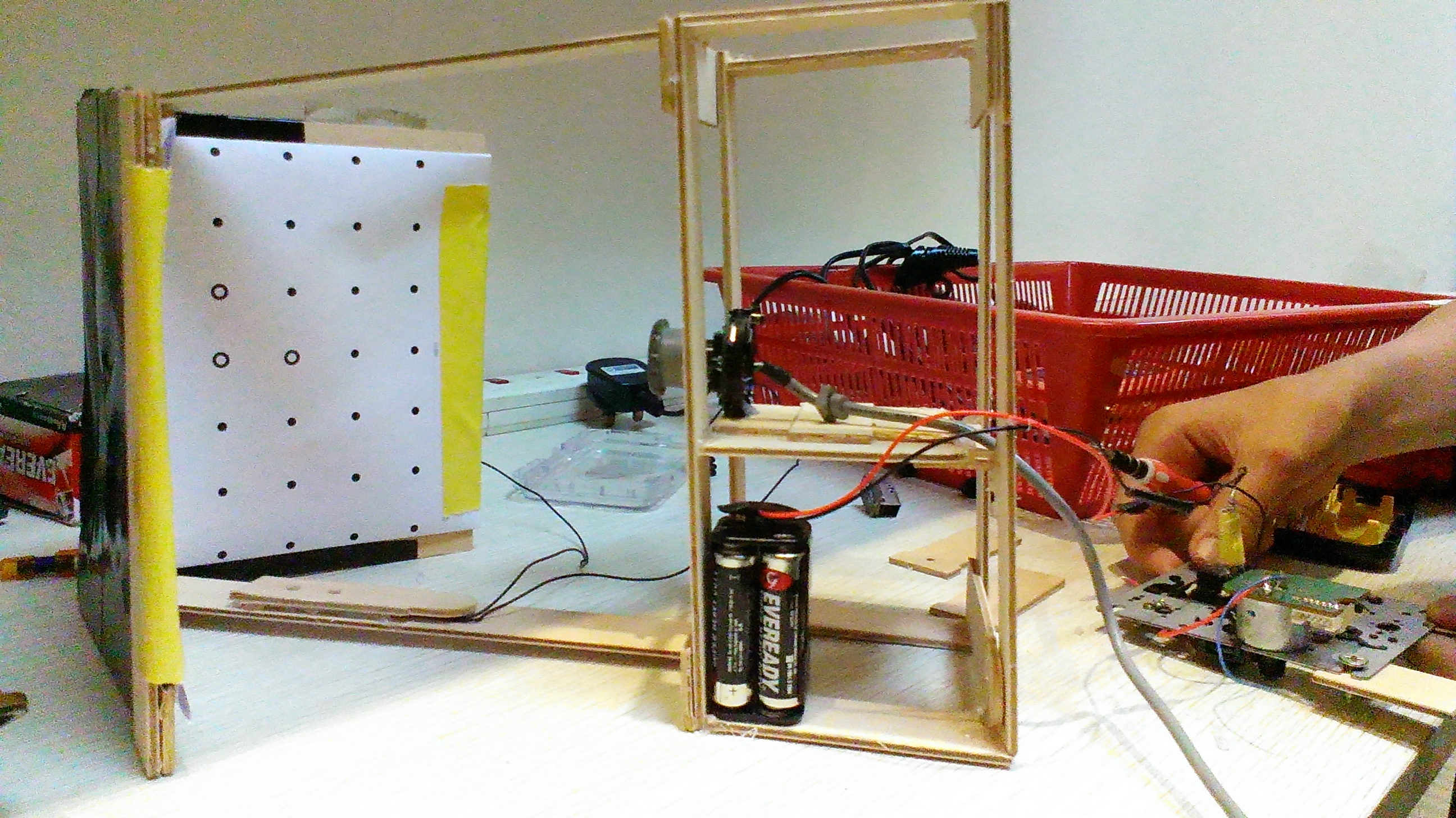
How we built it
This project is built with nothing more than an old CCD sensor, a DC motor, a line laser, and linear traverse. All parts were salvaged electronics, coming mainly from an old CD Player and webcam. The line laser projects a horizontal line on the object, which is recorded by the CCD sensor. Due to unevenness in the surface of the object, the line is distorted. These distortions can be compared with the undistorted 'ideal' line with the help of reference points projected on the background. By analysing the distortions using the DAVID algorithm, we can determine the shape and depth of the surface. By taking multiple snapshots of these lines, we piece together a point-cloud 3D surface model. The scanned object is then rotated 60 degrees on the platform and another scan is taken. This is continued until the model has been scanned from 6 angles. These surface models are then spliced together using Blender and processed into a geometric mesh model. Finally, the mesh is exported as an STL file.
Challenges we ran into
As all the parts were salvaged electronics, it was difficult to get everything working together. In particular, there were numerous issues with the driver compatibility for the CCD sensor.
Accomplishments that we're proud of
What I learned
We learned a lot about image processing, such as the calculation of three-dimensional depth from a two-dimensional image. We also had to learn about various three-dimensional models and various methods of cleaning, processing, and meshing such models. Finally, this was our first hardware project

Log in or sign up for Devpost to join the conversation.