-

our logo
-

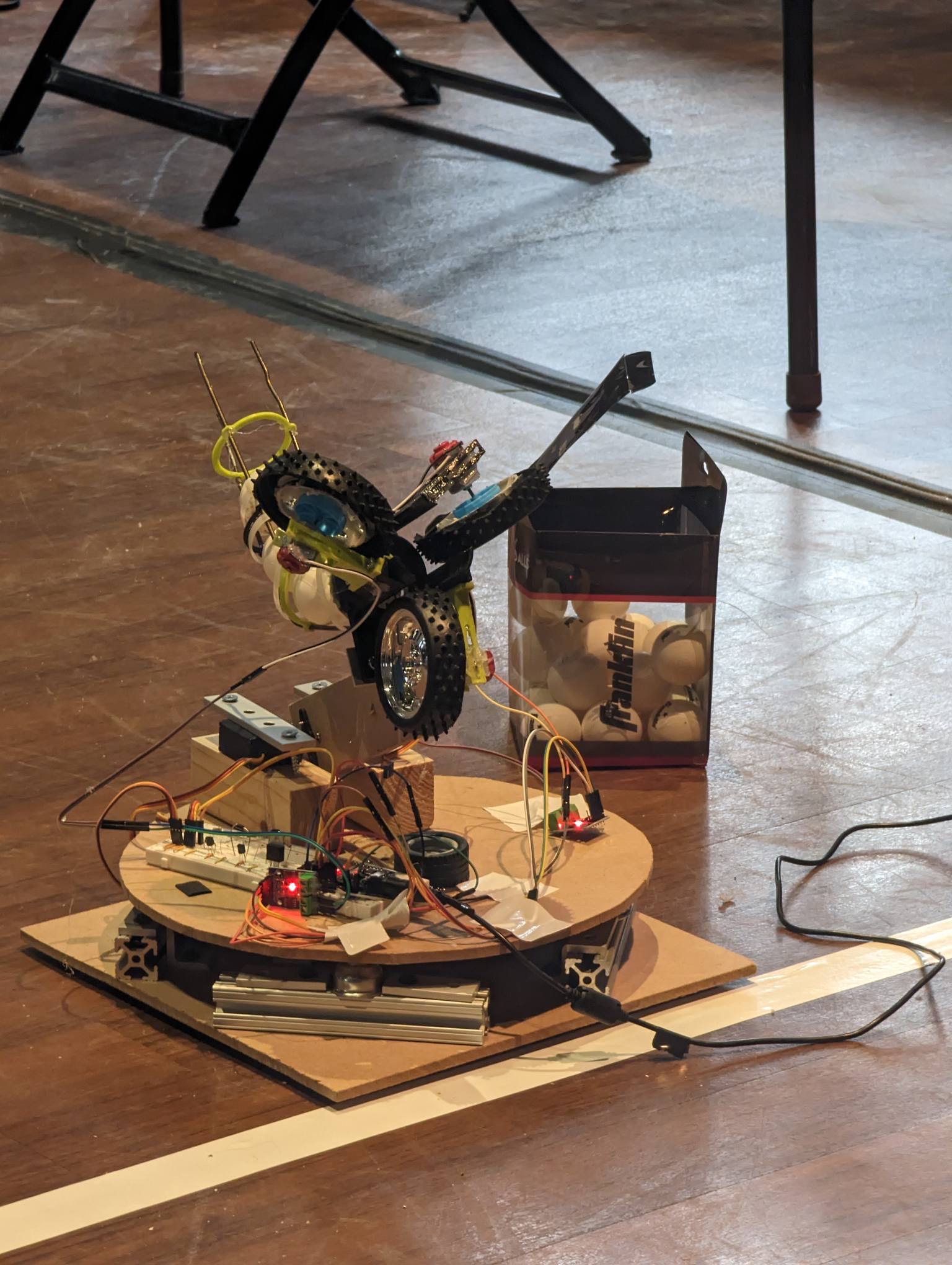
front on view of the 3 wheel launcher
-
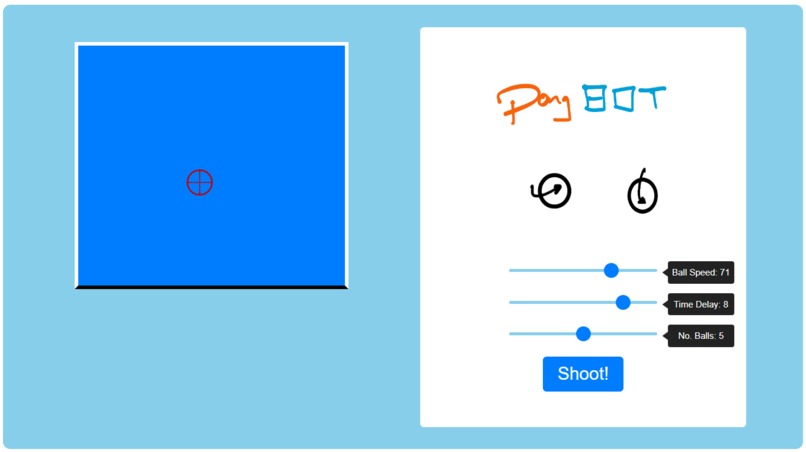
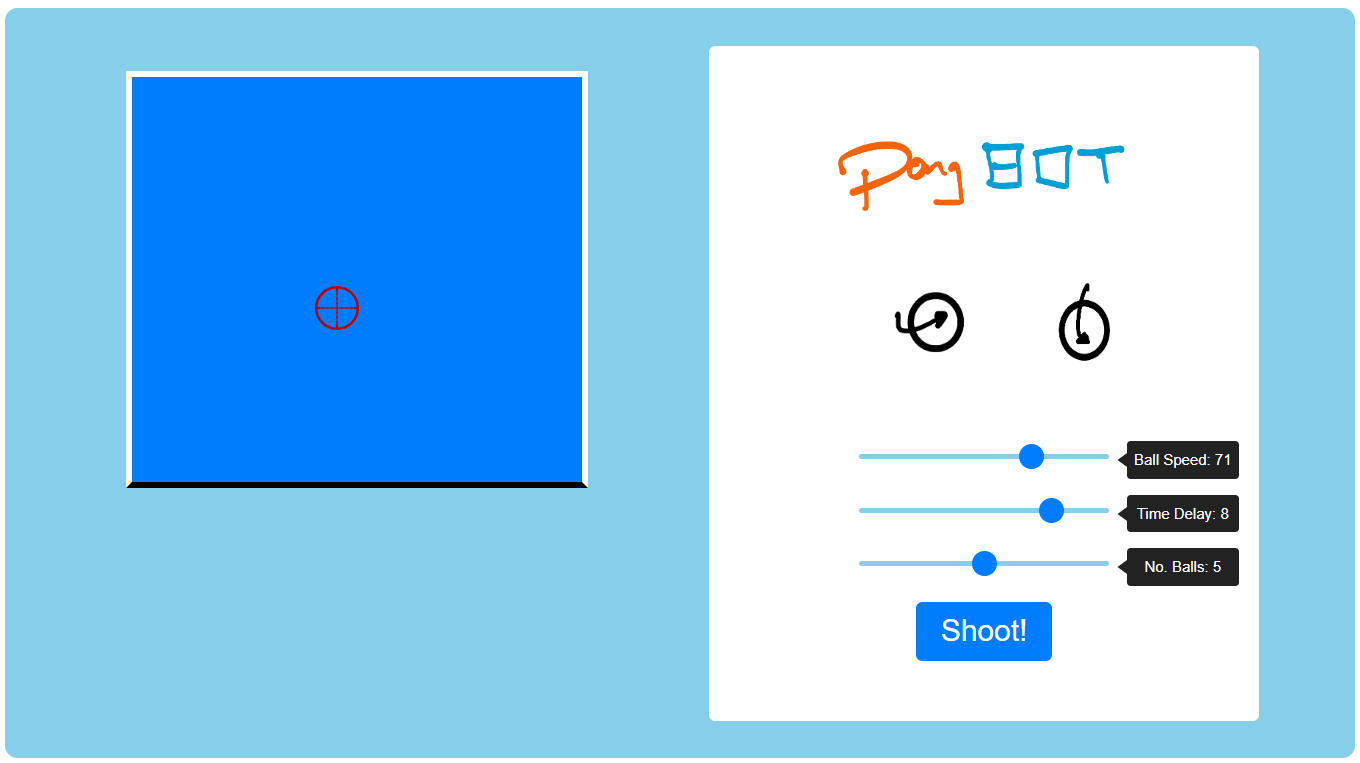
this is our shot control ui. we can control the location where the ball lands, whether or not we want spin, and the speed of the ball.
-
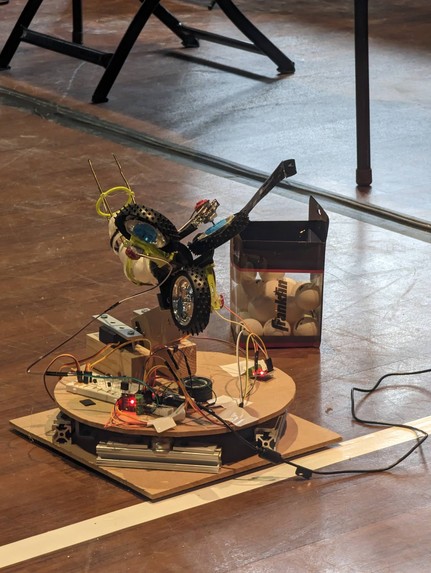
the machine
-
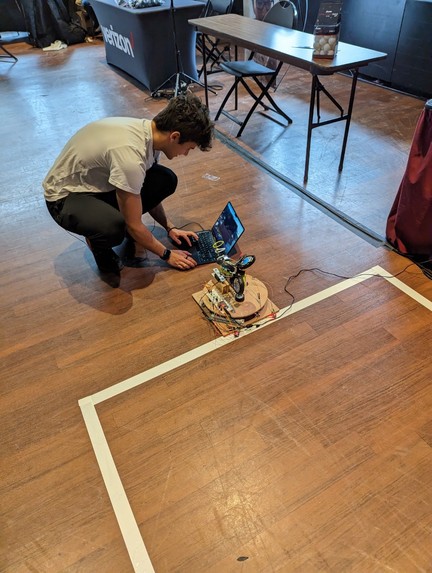
Niko feeding the balls into the machine


Inspiration
We were inspired by many things, from Niko's wish to learn how to play ping pong to Nav's infatuation with baseball pitching machines. We wanted to be able to replicate any shot at any time at many speeds, and this was the best way.
What it does
Using a 3-wheel launcher, pongBOT generates repetitive, consistent trajectory shots with any spin landing anywhere on the ping pong table.
How we built it
Servo motors regulated the pitch and yaw, while the GUI allowed players to select where and what type of shot they wanted to practice. We used 3D-printed parts to build out a ball-feeder, and 3 independently-controlled wheels on different axes to generate various spins.
Challenges we ran into
Integration was a large obstacle, as the different hardware parts were difficult to finally combine with the software. Time constraints prevented us from being able to build out some parts thoroughly, which led to some part failures and reductions in expectations.
Accomplishments that we're proud of
We are very proud of how accurate the machine is, as it can hit a target within a 3 inch radius. We are also able to consistently replicate spins and spin axes, which allows for very efficient practice for the player.
What we learned
We learned a lot about GUI construction, the physics of the Magnus Effect, and the limits of motor controllers.
What's next for pongBOT
The competition in this space is nonexistent at the price point we are targeting. We will be able to undercut the price of machines with similar capabilities by over 80%, and create a new household item that is fun for everyone.
Built With
- arduino
- css3
- dc
- esp32
- express.js
- html5
- http
- javascript
- node.js
- python
- rust
- servo
- stepper
- tcp
- ui





Log in or sign up for Devpost to join the conversation.