-
-
The Steve
The Steve
A waterPong playing robot that procedurally generates insults.
Description
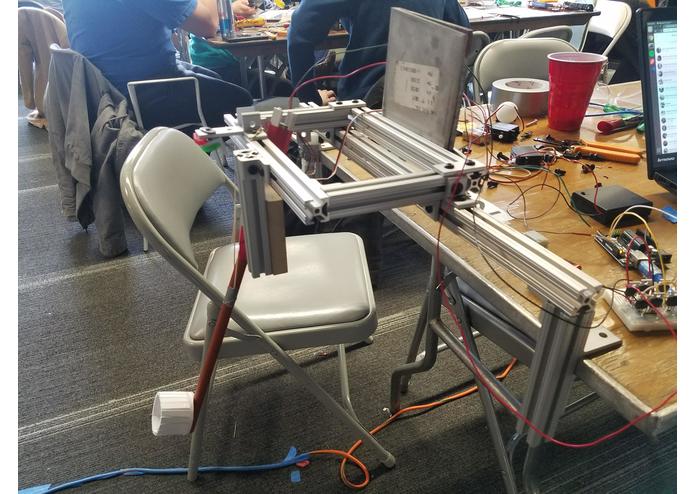
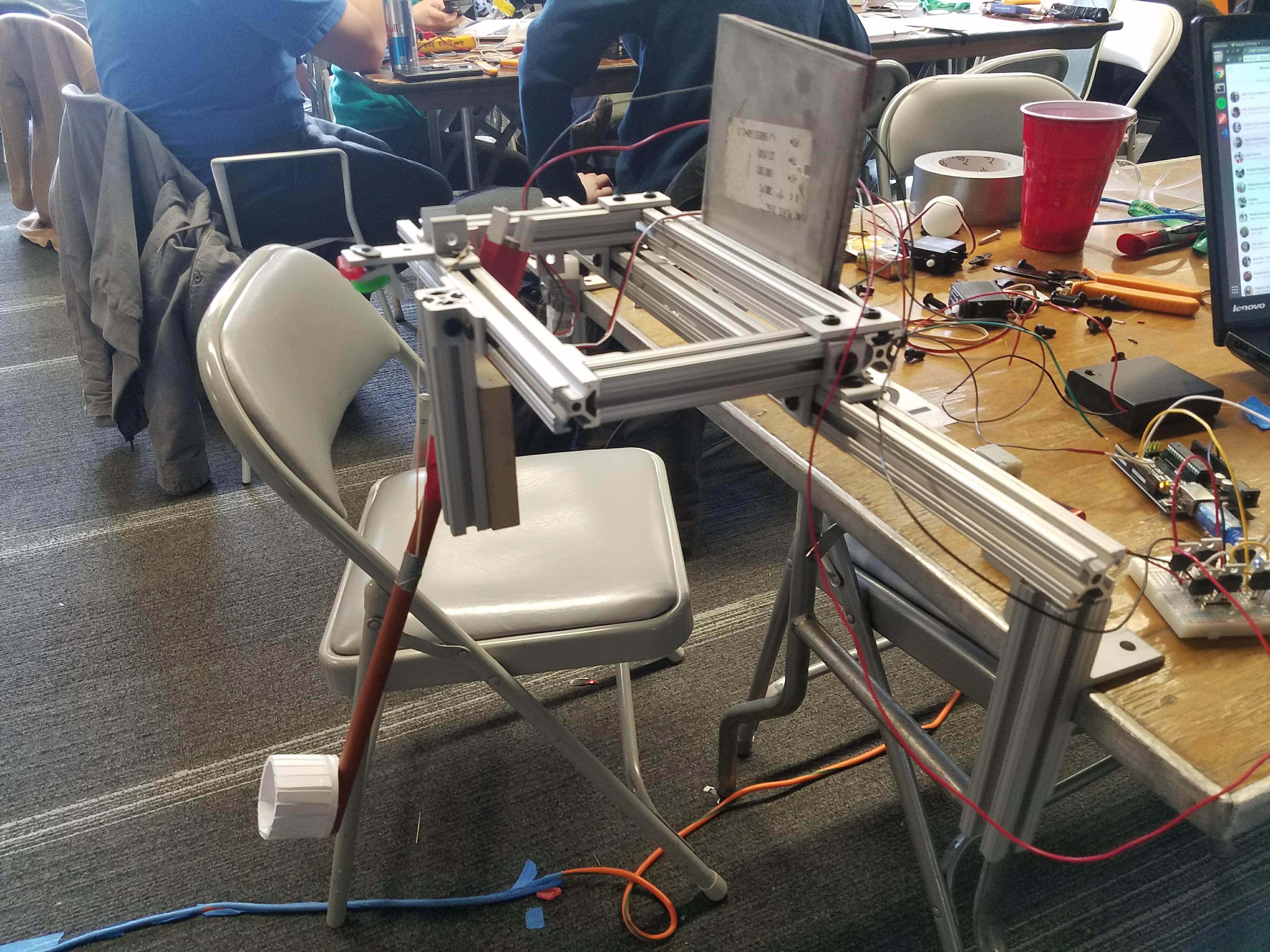
The Steve is a Water Pong playing robot that clamps to the end of a table. It is built mainly out of 80-20s and utilizes patented Swedish Fish damping technology to ensure that the ball is released at a consistent angle every single time. It can move laterally using a rack and pinion system and throw a ping pong ball an entire foot (!!!) using a servo motor attached to a throwing arm. The Steve is controlled using a custom built H-bridge, an arduino Uno and a python script. Although the Steve isn't the best pong player, he sure is confident! As such he procedurally generates an insult before every shot and vocalizes it using the Bing text-to-speech API.
Future work
After the hackathon we want to implement numerous improvements to the Steve system to make it an actually viable pong player:
- Replace the weak servo with a strong and fast dynamixel AX-18A servo, so the Steve could reach the other end of a pong table.
- Use a raspberry Pi to run the code on an independent system and not require a laptop to be connected to the Steve.
- Use a camera and openCV to automatically aim the system laterally.
- Use a depth camera to measure the distance of the opposing team's cups and automatically calibrate the throwing force accordingly.
- Use machine learning to improve the Steve's insult generator.



Log in or sign up for Devpost to join the conversation.